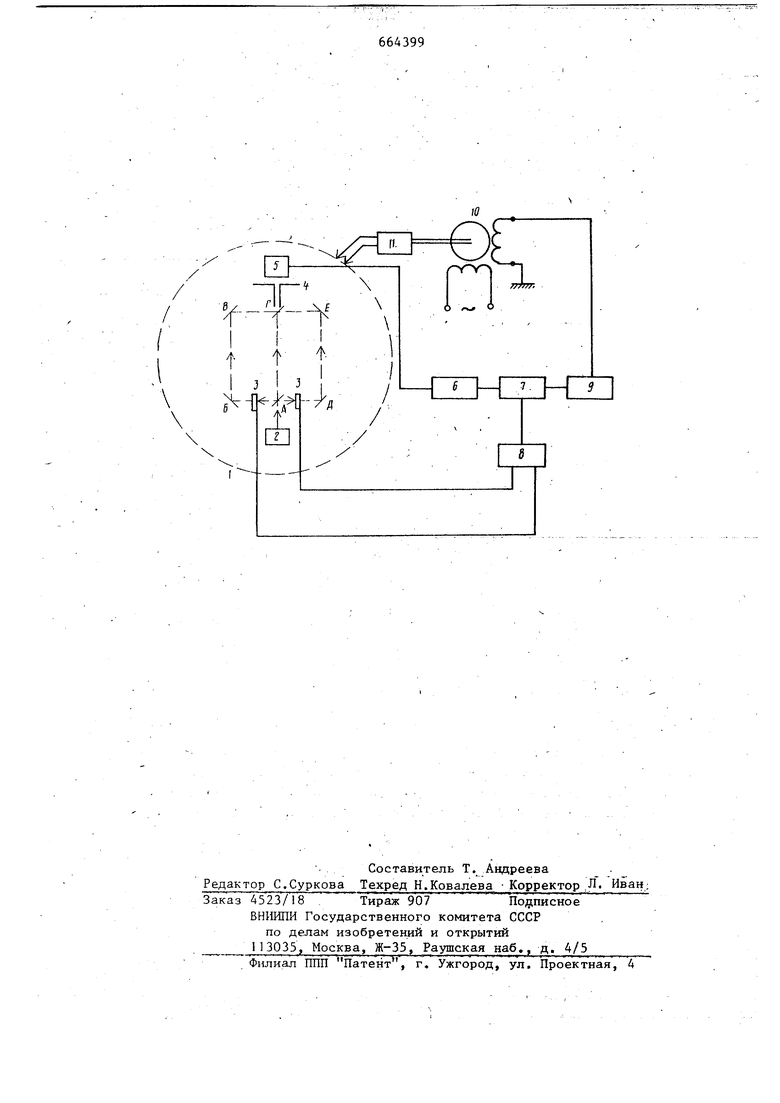
Изобретение касается прецизионног обнаружения иизмерения малых угловых перемещений и может быть использован например, в системах дальней навигации для стабилизации курса. Известен способ использования ви ..ревого эффекта для обнаружения медленных вращАтельных движений, например, корабля. Для этого используют о тическую цепь, охватывающую контур площадь которого достаточно велика для того, чтобы заметить визуально или фотографически вращение корабля по интерференции двух лучей, один из которых направленпо направлению вращения, а другой - в противоположном направлении. Однако такой способ имеет невысокую точность индикации угловых перемещений, а устройство для его осуществления отличается сложностью, гр моздкостьюи низкой чувствительностью Цель изобретения - повышение точности измерения угловой скорости и yr-i ла поворота объекта. Это достигается тем, что положение интерференционного датчика относительно осей объекта,меняют при помощи сервопривода, управляемого сигналом датчика таким образом, чтобы при повороте объекта в одном направлении датчик вращался в той же плоскости и с такой же угловой скоростью, но в противоположном направлении, при этом угловую скорость объекта определяют п6 скорости вращения промежуточного звена редуктора сервопривода, а угол поворота - по изменению положения датчика относительно осей объекта. На чертеже изображена функциональная схема устройства для осуществления предлагаемого способа. На поворотной платформе I установлено оптическое, устройство 2, оптически связанное через коммутатор 3 с экраном 4 со щелью, за которым ус.тановлен фотоумножитель 5, соединенный с частотным узкополосным фильтром 6, выход которого соединен с фазовым .дискриминатором 7, соединенным с генератором 8 коммутатора 3 и с усилителем сервопривода 9, связанного с поворотной платформой 1 через исполнительный двигатель IО с редуктором 1 1 . Интерференционная картина на экране 4 образуется за счет взаимодействия двух лучей: луча, прошедшего .путь от точки А до Г, и одного излу чей, прошедших контур ЛБВГ или АДЕГ При вращении , например, по часовой стрелке, луч АББГ будет сов гтадаТь с направлением вращения,, а луч АДЕГ направлен в противоположную сторону. За счет коммутации лучей коммутатором 3 с частотой генератора 8 созда ется модуляция интерференционной картины на экране в случае абсолютного вращения платформы 1, т.е. вращения Относительно системы (этсчета,определяекрй неподвижными звездами. Фототок фотоумножителя 5 при этом становится .периодической функцией, пропорцйоиаль нойСббтОвому потоку, проходящему через щель экрана 4. Фильтр 6 выделяет из этой функции гармоническую составляющую частоты генератора 8. Припомощи фазового дискриминатора 7 осуществляется селекция сигнала по направлению вращения объекта, который затем через сервоусилитель 9 вызывае вращение исполнительного двигателя 1 и через редуктор 11 - вращение платф 1) Сторо-ну, противоположную вра щению объекта. Абсолютный угол повор та платформы в(-ь).„(-ь)а1, где a.(-t)- угловая скоростьвращёйия объекта; )- угловая скорость вращения . платформы относительно объек При условии 512У:)-5(Огшатформа оказывается стабилизированной по направлению. Определение угла поворота объекта производится по изменению полохе1ШЯ относительно объекта, а скорость вращения объекта - по скорости вращения платформы или другого , связанного с платформой редуктором, г. I Практическая реализация предлагаемого способа позволяе;т повысить чувствительность и точность измерения малых угловых перемещений. Измерение ., - ....j-. . - - . . угловых скоростей порядка о, 1-0.01 -2.- дает возможность использовать изобретение при .построении систем стабилизации курса. Формула изобретения Способ автономного определения малых угловых перемещений объекта, основанный на использовании эффекта САНЬЯКА, осуществляемого при помощи интерференционного датчика, о тличающийся тем, что, с целью повьщ ёния точности измерения .угловой скорости и угла поворбта объектй, положение интерференционного датчика относительно осей объекта меняют при помощи сервопривода, управляемого сигналом указанного датчика таким образом, чтобы при повороте объекта в одном направлении датчик вращался в той же-плоскости и с той же угловой скоростью. Но в противоположном направлении, при этом угловую ско7 ррсть объекта определяют по ёкорости вращения промежуточного звена редуктора сервопривода, а угол поворота по изменению положения датчика от|носительно осей объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| "Способ автономного определения малых углоВыХ пЕРЕМЕщЕНий Об'ЕКТА | 1961 |
|
SU664400A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ АНИЗОТРОПИИ ПРОСТРАНСТВА СКОРОСТЕЙ ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ | 2012 |
|
RU2498214C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНОГО СКЛОНЕНИЯ НА МОРЕ | 1990 |
|
RU2069876C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2007 |
|
RU2348011C1 |
| СПОСОБ УПРАВЛЕНИЯ КОРАБЕЛЬНЫМ КОМПЛЕКСОМ ОРУЖИЯ | 2013 |
|
RU2522356C1 |
| Способ измерения магнитного склонения и устройство для его осуществления | 1986 |
|
SU1343372A1 |
| Устройство для измерения угла или угловой скорости | 1977 |
|
SU1034619A3 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2005 |
|
RU2279039C1 |
| МОДЕЛЬ ОСВЕТИТЕЛЬНОЙ СИСТЕМЫ АЭРОДРОМА ДЛЯ ОБУЧЕНИЯ ПОСАДКЕ | 1992 |
|
RU2042981C1 |
| Устройство для измерения неравномерности скорости вращения | 1982 |
|
SU1062611A1 |
.aa.fcs«.:j
