-1
Изобретение относится к медицинской технике, а именно к протезам верхних конечностей.
Известна искусственная кисть, используемая для протезов с биоэлектрическим управлением, которая содержит корпус, пальцы с рычажным механизмом, электромеханический привод с элементами крепления в виде винтов и регулировочной прокладки
1.
Однако далеко не все инвалиды могут освоить управление электромеханическим приводом и осуществлять тонкую регулировку силы схвата предметов при сохранении высокой скорости сближения пальцев. Поэтому кисть не обеспечивает схвата хрупких предметов без опасности их разрушения. Более 60% инвалидов имеют патологические отклонения со стороны нервной системы. Особенно трудно пользоваться известными кистями инвалидам с замедленными реакциями. Кроме того, известные искусственные кисти обладают сравнительно высоким уровнем шума, что оказывает раздражающее воздействие на психику инвалида и еще более затрудняет отработку точных движений кистью.
Целью изобретения является расширение динамического диапазона регулирования усилия схвата у инвалидов с замедленными реакциями.
Поставленная цель достигается тем, что элементы крепления выполнены в виде
плоских упругих компенсаторов, фиксированных по периметру в корпусе с помощью крышек и винтовых ограничителей с центральными буртиками, неподвижно соединенных одними концами с приводом, а другими - с центрами упругих ко,мпенсаторов, а концы пальцев снабжены накладками пониженной жесткости, причем ограничители установлены с кольцевым зазором между их буртиками и корпусом величиной не менее удвоенной амплитуды вибраций привода.
Для снижения шума и вибрации корпуса каждый упругий компенсатор выполнен
в виде диска с торообразньш утолщением по периметру и двояковогнутыми торцовыми поверхностями, имеющими радиальные углубления, а в корпусе и крыщках выбраны пазы.
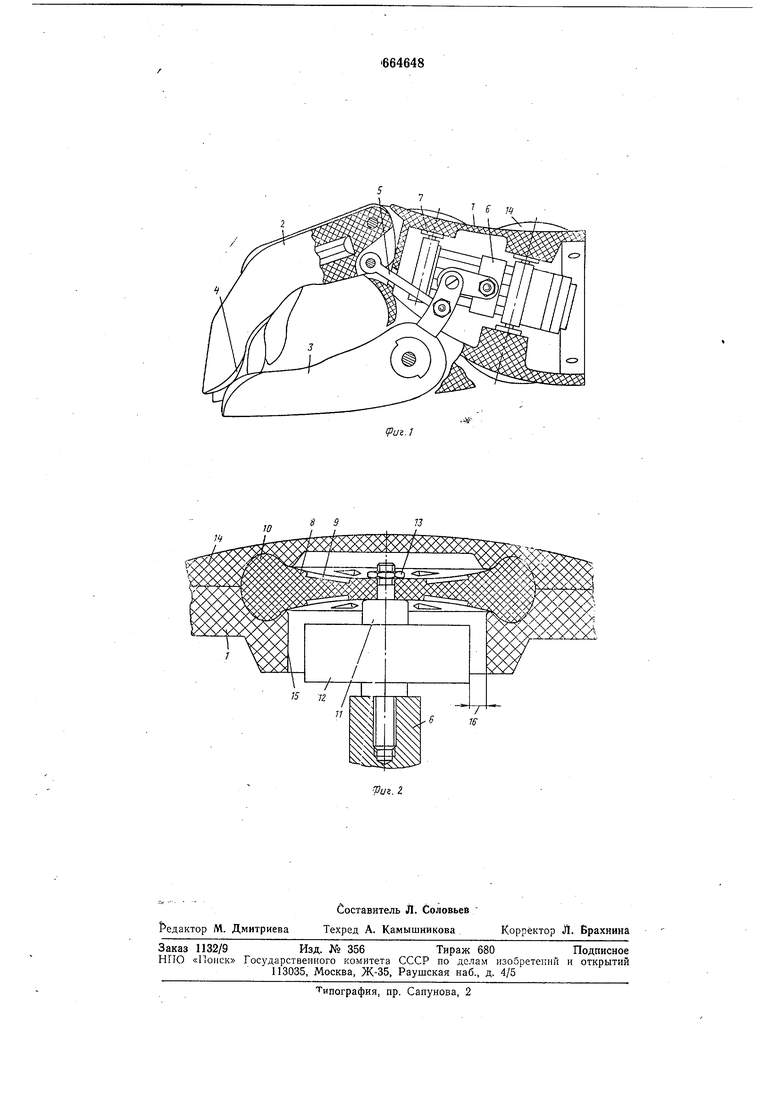
На фиг. 1 изображена предлагаемая искусственная кисть с вырезом боковой стенки корпуса, общий вид; на фиг. 2 показан элемент крепления в увеличенном масштабе.
Искусственная кисть состоит из корпуса 1, блока четырех пальцев 2 и большого иальца 3 с накладками 4 пониженной жесткости, рыжачного механизма 5, электромеханического привода 6 и элементов 7 крепления, содержащих плоские упругие компенсаторы 8 в виде диска с радиальными углублениями 9, горообразным утолщением 10 и двояковогнутыми торцовыми поверхностями, винтовые ограничители И с центральными буртиками 12 и гайкой 13, а также крыщки 14. Кроме того, в корпусе I и крыщках 14 выбраны пазы. Между буртиками 12 и стенкой 15 корпуса 1 предусмотрен зазор 16 не менее удвоенной амплитуды вибраций привода в направлении оси ограничителей И.
Работа кисти происходит следующим образом.
В период движений пальцев 2 и 3 на схват в элементах крепления привода возникают небольщие реактивные усилия, обусловленные преодолением сопротивления косметической оболочки, надеваемой на кисть, а также сборочного трения в щарнирных сочленениях механизма кисти. Эти усилия воспринимаются торообразными утолщениями 10 компенсаторов 8 и пазами крыщек 14 и корпуса I, в которых расположены торообразные утолщения 10. Под действием реактивных усилий привод 6 смещается в радиальном направлении упругих компенсаторов 8 в соответствии с их податливостью на величину, лежащую в пределах зазора 16 между буртиками 12 и стенками 15 корпуса 1. В начале зажатия предмета усилие схвата нарастает медленно в соответствии с жесткостными характеристиками накладок 4 и компенсаторов 8, при этом происходят выборка зазора 16 и деформация накладок 4. После полной выборки зазора 16 и достижения максимальной деформации накладок происходит жесткий упор буртиков 12 в стенки 15-и может быть обеспечен схват предметов с больщим усилием.
В период движения пальцев 2 и 3 на схват или раскрытие кисти, кроме того, обеспечивается виброизоляция корпуса кисти 1, причем более высокая в осевом направлении винтовых ограничителей 11 в силу того, что жесткость упругих компенсаторов 8 в этом направлении значительно меньще радиальной жесткости, выбираемой
из условия отсутствия контарта буртиков 12 и стенок 15 корпуса I. Оптимальное соотношение осевой и радиальной жесткостей компенсаторов 8 достигается выполнением их в виде дисков с двояковогнутыми торцовыми поверхностями и радиальными углублениями на этих поверхностях.
Снижение интенсивности излучения высокочастотного щума привода 6 во внешнее акустическое поле обеспечивается установкой крышек 14.
Использование предлагаемой искусственной кисти позволяет расширить динамический диапазон регулирования усилия схвата, что облегчает управление протезом инвалидам с замедленными реакциями. Кроме того, кисть исключает разряжающее воздействие (звуковое и вибрационное) на инвалида.
Формул а изобретения
1.Искусственная кисть, содержащая корпус, пальцы с рычажным механизмом и электромеханический привод с элементами крепления, отличающаяся тем, что, с целью расширения динамического диапазона регулирования усилия схвата у инвалидов с замедленными реакциями, элементы крепления выполнены в виде плоских упругих компепсаторов, фиксированных по периметру в корпусе с помощью крышек и винтовых ограничителей с центральными буртиками, неподвижно соединенных одними концами с приводом, а
другими - с центрами упругих компенсаторов, а концы пальцев снабжены накладками пониженной жесткости, причем ограничители установлены с кольцевым зазором между их буртиками и корпусом величиной не менее удвоенной амплитуды вибраций привода.
2.Искусственная кисть по п. 1, отличающаяся тем, что, с целью снижения щума и вибраций корпуса, каждый упругий
компенсатор выполнен в виде диска с торообразным утолщением по периметру и двояковогнутыми торцовыми поверхностями, имеющими радиальные углубления, а в корпусе и крышках выбраны пазы.
Источники информации,
принятые во внимание при экспертизе 1. Протезирование и протезостроение. - Сб. трудов ЦНИИПП, вып. 22. М., 1969, с. 31-39.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| ПРОТЕЗ РУКИ ДЛЯ ПАЦИЕНТОВ СО СТЕПЕНЬЮ АМПУТАЦИИ ОТ ПАЛЬЦЕВ ДО ПРЕДПЛЕЧЬЯ, ПРОТЕЗ ЛУЧЕЗАПЯСТНОГО СУСТАВА, ВКЛЮЧАЮЩИЙ ПРОТЕЗ КИСТИ РУКИ, УСТРОЙСТВО БЛОКИРОВКИ ТРОСОВ ТЯГ ПАЛЬЦЕВ ПРОТЕЗА КИСТИ РУКИ (3 ВАРИАНТА), УСТРОЙСТВО УПРАВЛЕНИЯ КОМБИНАЦИЕЙ ПОЛОЖЕНИЯ ПАЛЬЦЕВ ПРОТЕЗА КИСТИ РУКИ (2 ВАРИАНТА) | 2017 |
|
RU2664171C1 |
| ЛЕЧЕБНО-ТРЕНИРОВОЧНЫЙ ПРОТЕЗ РУКИ | 1994 |
|
RU2082359C1 |
| Протез предплечья | 1989 |
|
SU1732969A1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2013 |
|
RU2541816C2 |
| Электромеханическая кисть | 2017 |
|
RU2663942C1 |
| Электромеханическая кисть | 2017 |
|
RU2663941C1 |
| Односхватный электромеханический протез кисти | 2020 |
|
RU2762842C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1991 |
|
RU2026654C1 |
| ИСКУССТВЕННАЯ КИСТЬ | 1973 |
|
SU388744A1 |
Jf
