ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к области медицинской техники в сфере протезирования и электомеханического протезирования, а именно к протезированию верхних конечностей. В частности, настоящее изобретение описывает техническое решение, относящееся к устройству односхватного электромеханического протеза кисти.
ГЛОССАРИЙ
Модуль кисти - часть протеза верхней конечности, частично или полностью повторяющая внешний вид и функции кисти человека.
Односхватная электромеханическая кисть - электромеханический модуль кисти протеза верхней конечности, у которого имеется как минимум один электродвигатель, позволяющий выполнять единственный жест.
Пользователь - лицо, которое использует протез для выполнения конкретной функции.
Схват - смыкание-размыкание пальцев кисти.
УРОВЕНЬ ТЕХНИКИ
Электромеханические протезы с одним схватом являются наиболее распространенным типом протезов с внешним источником энергии благодаря своей простоте и высокой силе схвата. Основные требования к таким протезам: обеспечение высокой силы схвата при всех возможных типоразмерах; возможность применения при ампутации в нижней трети предплечья или при вычленении плеча; малый вес.
Из уровня техники известны односхватные электромеханические кисти, в которых применен электрический привод механизма схвата.
Известны решения «Prothese d'une main a entrainement exterieur» (патент №CA-2450964-C), «Myoelectrically controlled artificial hand has automatic change to gripping» (патент №DE-20301116-U1),  (патент №CN106821560B), «Motorisch angetriebene prothetische Greifvorrichtung» (патент №DE-20011799-U1), «Safety clutch for a prosthetic grip» (патент №US7041141B2), «Электромеханическая кисть» (патент №RU2663941C1), «Электромеханическая кисть» (патент №RU2663942C1),. Недостаток подобных решений заключается в том, что ось электродвигателя расположена в поперечной плоскости относительно кисти. Это приводит к тому, что ширина ладони не может быть меньше длины электромотора, что не позволяет создавать кисти малых размеров с высокой мощностью электродвигателя.
(патент №CN106821560B), «Motorisch angetriebene prothetische Greifvorrichtung» (патент №DE-20011799-U1), «Safety clutch for a prosthetic grip» (патент №US7041141B2), «Электромеханическая кисть» (патент №RU2663941C1), «Электромеханическая кисть» (патент №RU2663942C1),. Недостаток подобных решений заключается в том, что ось электродвигателя расположена в поперечной плоскости относительно кисти. Это приводит к тому, что ширина ладони не может быть меньше длины электромотора, что не позволяет создавать кисти малых размеров с высокой мощностью электродвигателя.
Предпринимался ряд попыток создать кисть с приводом, ось которого расположена вдоль дистальной оси верхней конечности.
Известно решение «Functional hand prosthesis mechanism» (патент
№US8021435B2). Недостаток указанного решения заключается в том, что электродвигатель расположен в проксимальной части искусственной кисти, что приводит к увеличению ее длины и не позволяет применять для пациентов с длинной культей предплечья.
Известно решение «Приспособление к протезу кисти человека» (патент
№RU189912U1). Недостатком указанного решения является то, что привод осуществляется с помощью винтовой передачи, что ведет к увеличению габарита модуля кисти в направлении от пальцев к запястью, так как для обеспечения хода винта требуется место в продольном направлении. Это ограничивает возможность применения данного решения для пользователей с длинной культей предплечья.
Наконец, разрабатывались компоновки механизмов, у которых ось электродвигателя параллельна дистальной оси, а входной и выходной вал редуктора располагаются с одной стороны редуктора. Известно решение «Prosthetic hand» (патент №JP3893453B2). Недостаток описанного решения в том, что зубчатые передачи не защищены от случайного попадания посторонних частиц в детали зубчатой передачи.
Известно техническое решение «Artificial hand and drive apparatus for such hand» (патент №US4114464A), в котором два активных пальца связаны червячной передачей. Недостатком данного технического решения является использование одного червяка для приведения в действие двух червячных колес, что является решением, требующим финансовых затрат и дополнительных ресурсов при их первичной настройке, поскольку необходима регулировка сразу двух червячных пар, кроме того, указанное решение имеет незащищенные от попадания посторонних предметов зубчатые и червячные передачи.
Известно решение «Механизм схвата детского односхватового биоэлектрического протеза верхней конечности» (патент №RU2719658C1). Недостаток указанного решения заключается в том, что несущие узлы, такие как корпус и пальцы протеза выполнены из искусственного материала с пределом прочности выше 35 Мпа (Полиамида), что не позволяет создавать протезы с мощностью электродвигателя больше 7 Вт, так как это может приводить к деформациям корпуса и пальцев из полиамида из-за недостаточной жесткости материала, из которого выполнен корпус.Таким образом, данное решение не применимо для протезирования взрослых пользователей. Другим недостатком данного решения является то, что формообразующие элементы кисти одновременно выполняют роль несущих, что не позволяет осуществлять смену формообразующих деталей без разборки механизма.
СУЩНОСТЬ ТЕХНИЧЕСКОГО РЕШЕНИЯ
Рассматриваемая конструкция решает несколько технических проблем. Первая проблема заключается в необходимости обеспечить большую силу схвата при относительно небольшой ширине протеза, что особенно важно при изготовлении протезов с шириной ладони менее 70 мм, вторая проблема заключается в необходимости защищать дорогостоящие детали механических передач от случайного попадания пыли, загрязнений и инородных предметов, которые могут их повредить, при обеспечении возможности смены формообразующих деталей без разборки механизма.
Технический результат патентуемого изобретения заключается в реализации односхватного электромеханического протеза кисти, содержащего по меньшей мере один электродвигатель или планетарный мотор-редуктор или волновой мотор-редуктор или циклоидальный мотор-редуктор, по меньшей мере одну одноступенчатую либо многоступенчатую цилиндрическую зубчатую передачу, по меньшей мере одну червячную передачу и рычажный механизм, и имеющего возможность смены формообразующих оболочек без разборки механизма, обеспечивающего защиту деталей механических передач от повреждений и загрязнений. При этом, конструкция обеспечивает силу хвата выше 35 Н.
Под формообразующими деталями понимаются детали из полимерных или композитных материалов, предназначенные для имитации формы человеческой кисти, выполнения практической функции насадки, держателя, инструмента и т.п., которые крепятся к деталям механизма схвата с помощью винтовых соединений, соединений с натягом, защелок или клеевых соединений.
Заявленный технический результат обеспечивается за счет конструкции односхватного электромеханического протеза кисти, состоящего из по меньшей мере одного электродвигателя или планетарного мотор-редуктора или волнового мотор-редуктора или цилиндрического зубчатого мотор-редуктора, по крайней мере одной многоступенчатой или одноступенчатой зубчатой цилиндрической передачи, по крайней мере одного червяка, по крайней мере одного червячного колеса, при этом ведущая шестерня зубчатой передачи соединена с по меньшей мере одним выходным валом электродвигателя или планетарного мотор-редуктора или волнового мотор-редуктора или цилиндрического зубчатого мотор-редуктора, а червячное колесо, тяга и искусственный большой палец схвата образуют механизм шарнирного четырехзвенника.
Механизм протеза кисти также включает элементы, соответствующие пальцам кисти, при этом, один из пальцев как большой палец кисти человека противопоставлен блоку пальцев, состоящих из по крайней мере одного пальца. Для осуществления схвата типа «щепоть» противопоставленный блок пальцев включает по крайней мере два пальца.
Двигатель приводит в движение по крайней мере одну ведущую шестерню первой цилиндрической ступени, по крайней мере одно тихоходное колесо последней цилиндрической ступени приводит в движение по крайней мере один червяк, приводящий в действие по крайней мере одно червячное колесо, причем червячное колесо, тяга большого пальца и большой палец являются четырехзвенным рычажным механизмом поворота большого пальца, а большой палец, тяга противопоставленного блока пальцев и блок пальцев образуют четырехзвенный рычажный механизм схвата.
Исполнительными звеньями рычажного механизма являются пальцы протеза, большой палец приводится в движение через тягу большого пальца от червячного колеса, а блок пальцев - через тягу блока пальцев от большого пальца.
Благодаря тому, что ось вращения электродвигателя или планетарного мотор-редуктора или волнового мотор-редуктора или цилиндрического зубчатого мотор-редуктора параллельна дистальной оси протеза, достигается относительно небольшой габарит механизма (от 30 мм). Благодаря тому, что у цилиндрического редуктора входной и выходной валы направлены в одну и ту же сторону, достигается относительно небольшой габарит кисти в дистальном направлении (менее 100 мм от запястья до кончиков пальцев).
Корпус редуктора может состоять из пластины и крышки редуктора.
Благодаря тому, что корпус цилиндрического редуктора герметично закрывает зубчатые передачи, достигается их защита от случайного попадания частиц пыли, грязи и иных инородных предметов. Благодаря тому, что червячное колесо и червяк защищены кожухом, состоящим из верхней и нижней частей, достигается защита червячной передачи от попадания крупных частиц грязи и посторонних предметов.
Благодаря применению двух четырехзвенных рычажных механизмов обеспечивается возможность изготовить кожух червячной передачи с одним единственным отверстием для выхода тяги, что минимизирует риск попадания посторонних частиц грязи в червячную передачу.
Возможны также варианты конструкции:
(с двумя тягами блока пальцев, одна из которых соединяет блок пальцев с большим пальцем, а другая - блок пальцев с червячным колесом, так что червячное колесо, тяга большого пальца, большой палец и кожух образуют механизм рычажного четырехзвенника, а большой палец, тяга блока пальцев, блок пальцев и кожух образуют другой механизм шарнирного четырехзвенника;
(когда тяга блока пальцев отсутствует, а блок пальцев неподвижен, так что червячное колесо, тяга и искусственный большой палец схвата образуют механизм шарнирного четырехзвенника;
(когда тяга блока пальцев соединяется не с большим пальцем, а с червячным колесом так, что блок пальцев, тяга блока пальцев, червячное колесо образуют механизм шарнирного четырехзвенника.
Благодаря тому, что верхняя и нижняя части кожуха изготовлены из металла, например, алюминиевого сплава, с модулем упругости свыше 70ГПа, достигается жесткость кожуха, что позволяет передавать большие нагрузки, характерные для протеза, предназначенного для взрослого человека.
Формообразующие детали устанавливаются на механизм с помощью винтов, соединений с натягом или защелок.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее решение поясняется ссылками на фигуры, на которых приведено следующее:
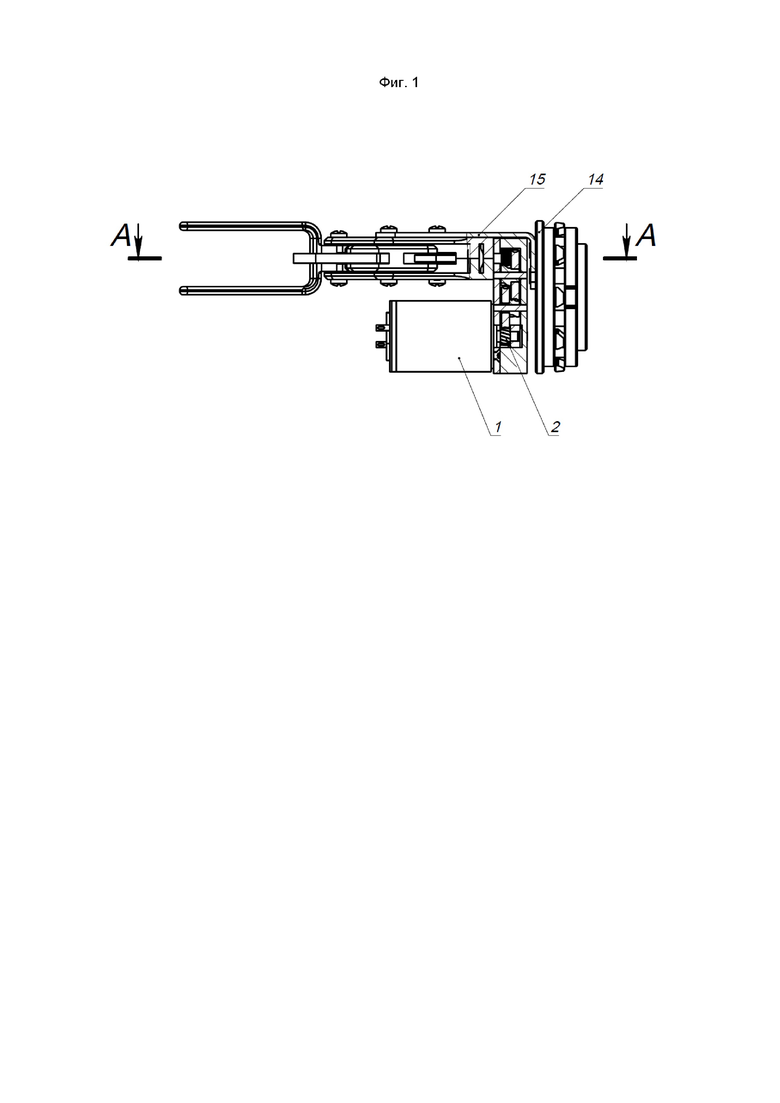
Фиг.1 - Главный вид.
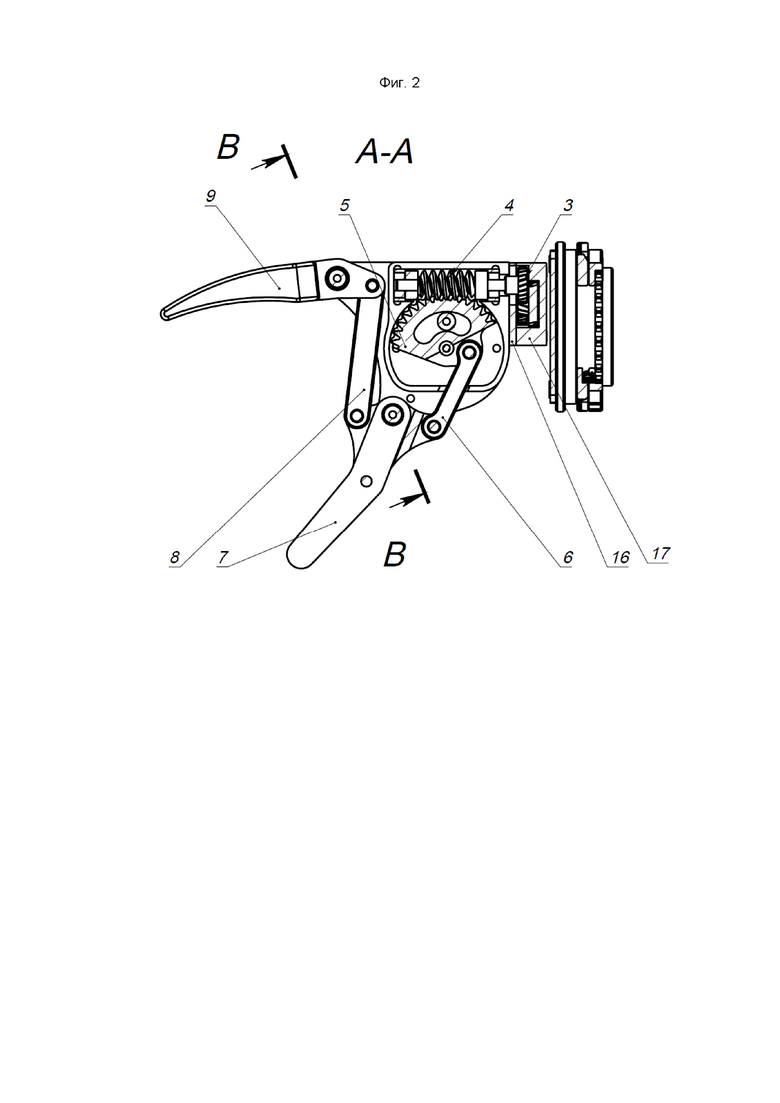
Фиг.2 - Сечение А-А.
Фиг.3 - Сечение В-В.
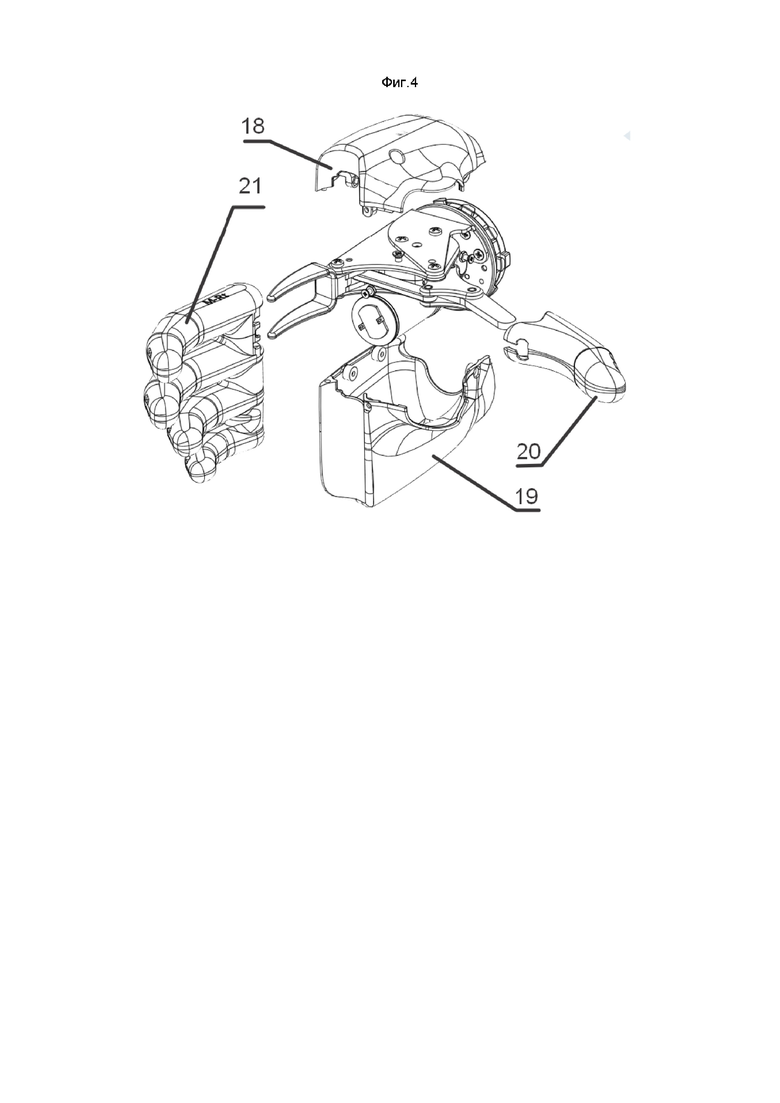
Фиг 4 - Механизм с формообразующими накладками
1 - Электродвигатель или планетарный мотор-редуктор или волновой мотор-редуктор или циклоидальный мотор-редуктор или цилиндрический зубчатый мотор-редуктор и, 2 - ведущая шестерня первой цилиндрической ступени, 3 - тихоходное колесо последней цилиндрической ступени, 4 - червяк, 5 - червячное колесо, 6 - тяга большого пальца, 7 - большой палец, 8 - тяга блока пальцев, 9 - блок пальцев, 10 - верхняя часть кожуха, 11 - нижняя часть кожуха, 12 - ось блока пальцев, 13 - ось большого пальца, 14 - узел запястья, 15 - кронштейн, 16 - пластина редуктора, 17 - крышка редуктора, 18 - верхняя формообразующая крышка, 19 - нижняя формообразующая крышка, 20 - формообразующая деталь большого пальца, 21 - формообразующая оболочка блока пальцев.
ОСУЩЕСТВЛЕНИЕ ТЕХНИЧЕСКОГО РЕШЕНИЯ
Для решения обозначенной проблемы разработан односхватный электромеханический протез кисти, содержащий по меньшей мере один электродвигатель и по меньшей мере одну многоступенчатую механическую передачу, по меньшей мере одну червячную передачу и рычажный механизм, обеспечивающие силу хвата выше 35 Н.
Возможность получения при осуществлении изобретения технического результата подтверждается следующим образом:
Механизм кисти состоит из электродвигателя мощностью 8,5 Вт (1) и четырехступенчатого цилиндрического редуктора, имеющего герметичный корпус.
Ведущая шестерня первой цилиндрической ступени (2) изготовлена из стали и соединена с валом электродвигателя, а тихоходное колесо последней цилиндрической ступени (3) изготовлено из стали и соединено с червяком (4), изготовленным из стали, который находится в зацеплении с червячным колесом (5), изготовленным из бронзы, имеющим паз, ограничивающий угловое перемещение червячного колеса. Червячное колесо и червяк установлены между верхней частью кожуха (10) и нижней частью кожуха (11), выполненного из алюминиевого сплава Д16Т (модуль упругости 72 Гпа), который, одновременно имеет проушины, в которых закреплены ось блока пальцев, состоящего из элементов, соответствующих среднему и указательному пальцам руки (12), и ось большого пальца (13), изготовленные из стали. Червячное колесо (5) соединено тягой большого пальца (6), изготовленной из листовой стали 12Х18Н10Т с большим пальцем (7), изготовленным из алюминиевого сплава с модулем упругости 72 ГПа, образуя шарнирный четырехзвенник.
При этом, кожух имеет только одну щель для выхода тяги наружу.
Другой шарнирный четырехзвенник образован большим пальцем, тягой блока пальцев (8), изготовленной из листовой стали и блоком пальцев (9), изготовленным из алюминиевого сплава Д16Т так, что блок пальцев и большой палец поворачиваются в противоположных направлениях замыкая или размыкая схват.Ширина схвата составляет 90 мм. Механизм кисти прикрепляется к узлу запястья (14) с помощью стального кронштейна (15).
Корпус редуктора состоит из пластины (16) и крышки редуктора (17), изготовленных из алюминиевого сплава Д16Т.
Верхняя формообразующая крышка (18) изготовлена из полиамида и крепится к верхней части кожуха с помощью винтов, Нижняя формообразующая крышка (19) крепится винтами к верхней части кожуха, формообразующая деталь большого пальца (20) крепится к большому пальцу с натягом, формообразующая оболочка блока пальцев (21) крепится к блоку пальцев с помощью соединения с натягом. Указанные способы крепления позволяют заменять детали 18-21 без разборки механизма
Габариты итогового механизма: ширина в ладонной части 35 мм. Габариты кисти в дистальном направлении: 110 мм от запястья до кончиков пальцев. Сила схвата механизма кисти составляет 80 H.
Возможность получения при осуществлении изобретения технического результата подтверждается также при выполнении обозначенной конструкции с использованием планетарного мотор-редуктора с передаточным отношением 1:10, ось вращения вала которого параллельна дистальной оси протеза. Сила схвата механизма кисти составляет 82 H.
Возможность получения при осуществлении изобретения технического результата подтверждается также при выполнении обозначенной конструкции с использованием волнового мотор-редуктора с передаточным отношением 1:100, ось вращения вала которого параллельна дистальной оси протеза. Сила схвата механизма кисти составляет 80 H.
Возможность получения при осуществлении изобретения технического результата подтверждается также при выполнении обозначенной конструкции с использованием цилиндрического зубчатого мотор-редуктора c передаточным отношением 1:5, ось вращения вала которого параллельна дистальной оси протеза. Сила схвата механизма кисти составляет 80 H.
Возможность получения при осуществлении изобретения технического результата с двумя тягами блока пальцев, одна из которых соединяет блок пальцев с большим пальцем, а другая - блок пальцев с червячным колесом, так что червячное колесо, тяга большого пальца, большой палец и кожух образуют механизм рычажного четырехзвенника, а большой палец, тяга блока пальцев, блок пальцев и кожух образуют другой механизм шарнирного четырехзвенника, подтверждается следующим образом: механизм кисти состоит из электродвигателя мощностью 8,5 Вт (1) и четырехступенчатого цилиндрического редуктора, имеющего герметичный корпус.
Ведущая шестерня первой цилиндрической ступени (2) изготовлена из стали и соединена с валом электродвигателя, а тихоходное колесо последней цилиндрической ступени (3) изготовлено из стали и соединено с червяком (4), изготовленным из стали, который находится в зацеплении с червячным колесом (5), изготовленным из бронзы, имеющим паз, ограничивающий угловое перемещение червячного колеса. Червячное колесо и червяк установлены между верхней частью кожуха (10) и нижней частью кожуха (11), выполненного из алюминиевого сплава Д16Т (модуль упругости 72 Гпа), который, одновременно имеет проушины, в которых закреплены блок пальцев, состоящий из элементов, соответствующих среднему и указательному пальцам руки (12), и ось большого пальца (13), изготовленные из стали. Червячное колесо (5) соединено тягой блока пальцев (8), изготовленной из листовой стали 12Х18Н10Т с блоком пальцев (12), изготовленным из алюминиевого сплава с модулем упругости 72 ГПа, образуя шарнирный четырехзвенник, а большой палец(7) соединен тягой большого пальца (6) с блоком пальцев(12) так, что блок пальцев, тяга большого пальца, большой палец и кожух образуют второй механизм шарнирного четырехзвенника. Блок пальцев и большой палец может вращаться, образуя схват с неподвижным блоком пальцев. Ширина схвата 90 мм.
При этом, кожух имеет только одну щель для выхода тяги наружу.
Механизм кисти прикрепляется к узлу запястья (14) с помощью стального кронштейна (15).
Корпус редуктора состоит из пластины (16) и крышки редуктора (17), изготовленных из алюминиевого сплава Д16Т.
Верхняя формообразующая крышка (18) изготовлена из полиамида и крепится к верхней части кожуха с помощью винтов, Нижняя формообразующая крышка (19) крепится винтами к верхней части кожуха, формообразующая деталь большого пальца (20) крепится к большому пальцу c натягом, формообразующая оболочка блока пальцев (21) крепится к блоку пальцев с помощью соединения с натягом. Указанные способы крепления позволяют заменять детали 18-21 без разборки механизма
Возможность получения при осуществлении изобретения технического результата с неподвижным блоком пальцев, так что червячное колесо, тяга и искусственный большой палец схвата образуют механизм шарнирного четырехзвенника, подтверждается следующим образом: Механизм кисти состоит из электродвигателя мощностью 8,5 Вт (1) и четырехступенчатого цилиндрического редуктора, имеющего герметичный корпус.
Ведущая шестерня первой цилиндрической ступени (2) изготовлена из стали и соединена с валом электродвигателя, а тихоходное колесо последней цилиндрической ступени (3) изготовлено из стали и соединено с червяком (4), изготовленным из стали, который находится в зацеплении с червячным колесом (5), изготовленным из бронзы, имеющим паз, ограничивающий угловое перемещение червячного колеса. Червячное колесо и червяк установлены между верхней частью кожуха (10) и нижней частью кожуха (11), выполненного из алюминиевого сплава Д16Т (модуль упругости 72 Гпа), который, одновременно имеет проушины, в которых закреплены неподвижный блок пальцев, состоящий из элементов, соответствующих среднему и указательному пальцам руки (12), и ось большого пальца (13), изготовленные из стали. Червячное колесо (5) соединено тягой большого пальца (6), изготовленной из листовой стали 12Х18Н10Т с большим пальцем (7), изготовленным из алюминиевого сплава с модулем упругости 72 ГПа, образуя шарнирный четырехзвенник. Большой палец может вращаться, образуя схват с неподвижным блоком пальцев. Ширина схвата 90 мм.
При этом, кожух имеет только одну щель для выхода тяги наружу.
Механизм кисти прикрепляется к узлу запястья (14) с помощью стального кронштейна (15).
Корпус редуктора состоит из пластины (16) и крышки редуктора (17), изготовленных из алюминиевого сплава Д16Т.
Верхняя формообразующая крышка (18) изготовлена из полиамида и крепится к верхней части кожуха с помощью винтов, Нижняя формообразующая крышка (19) крепится винтами к верхней части кожуха, формообразующая деталь большого пальца (20) крепится к большому пальцу с натягом, формообразующая оболочка блока пальцев (21) крепится к блоку пальцев с помощью соединения с натягом. Указанные способы крепления позволяют заменять детали 18-21 без разборки механизма
Возможность получения при осуществлении изобретения технического результата при варианте конструкции, где блок пальцев, тяга блока пальцев, червячное колесо образуют механизм шарнирного четырехзвенника подтверждается следующим образом: Механизм кисти состоит из электродвигателя мощностью 8,5 Вт (1) и четырехступенчатого цилиндрического редуктора, имеющего герметичный корпус.
Ведущая шестерня первой цилиндрической ступени (2) изготовлена из стали и соединена с валом электродвигателя, а тихоходное колесо последней цилиндрической ступени (3) изготовлено из стали и соединено с червяком (4), изготовленным из стали, который находится в зацеплении с червячным колесом (5), изготовленным из бронзы, имеющим паз, ограничивающий угловое перемещение червячного колеса. Червячное колесо и червяк установлены между верхней частью кожуха (10) и нижней частью кожуха (11), выполненного из алюминиевого сплава Д16Т (модуль упругости 72 Гпа), который, одновременно имеет проушины, в которых закреплены ось блока пальцев, состоящего из элементов, соответствующих среднему и указательному пальцам руки (12), и ось неподвижного большого пальца (13), изготовленные из стали. Червячное колесо (5) соединено тягой блока пальцев(8), изготовленной из листовой стали 12Х18Н10Т с блоком пальцев (9), изготовленным из алюминиевого сплава Д16Т так, что червячное колесо, тяга блока пальцев и блок пальцев образуют шарнирный четырехзвенник. так, что блок пальцев может поворачиваться замыкая или размыкая схват между блоком пальцев и неподвижным большим пальцем. Ширина схвата составляет 90 мм. Механизм кисти прикрепляется к узлу запястья (14) с помощью стального кронштейна (15).
При этом, кожух имеет только одну щель для выхода тяги наружу.
Корпус редуктора состоит из пластины (16) и крышки редуктора (17), изготовленных из алюминиевого сплава Д16Т.
Верхняя формообразующая крышка (18) изготовлена из полиамида и крепится к верхней части кожуха с помощью винтов, Нижняя формообразующая крышка (19) крепится винтами к верхней части кожуха, формообразующая деталь большого пальца (20) крепится к большому пальцу с натягом, формообразующая оболочка блока пальцев (21) крепится к блоку пальцев с помощью соединения с натягом. Указанные способы крепления позволяют заменять детали 18-21 без разборки механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ СХВАТА ДЕТСКОГО ОДНОСХВАТОВОГО БИОЭЛЕКТРИЧЕСКОГО ПРОТЕЗА ВЕРХНЕЙ КОНЕЧНОСТИ | 2019 |
|
RU2719658C1 |
| МЕХАНИЗМ ЭЛЕКТРОПРИВОДА ПАЛЬЦА БИОНИЧЕСКОЙ КИСТИ | 2023 |
|
RU2808344C1 |
| ИСКУССТВЕННАЯ БИОЭЛЕКТРИЧЕСКАЯ КИСТЬ РУКИ | 2021 |
|
RU2779492C1 |
| ПАЛЕЦ ПРОТЕЗА СО СПИРОИДНЫМ РЕДУКТОРОМ И МОДУЛЬНАЯ КОНСТРУКЦИЯ ПРОТЕЗА ВЕРХНЕЙ КОНЕЧНОСТИ | 2019 |
|
RU2727893C1 |
| Электромеханическая кисть | 2017 |
|
RU2663941C1 |
| ПРОТЕЗ КИСТИ | 2012 |
|
RU2506931C2 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| Электромеханическая кисть | 2017 |
|
RU2663942C1 |
| КИСТЕВОЙ ПРОТЕЗ | 2006 |
|
RU2427348C2 |
| ПРОТЕЗ РУКИ ДЛЯ ПАЦИЕНТОВ СО СТЕПЕНЬЮ АМПУТАЦИИ ОТ ПАЛЬЦЕВ ДО ПРЕДПЛЕЧЬЯ, ПРОТЕЗ ЛУЧЕЗАПЯСТНОГО СУСТАВА, ВКЛЮЧАЮЩИЙ ПРОТЕЗ КИСТИ РУКИ, УСТРОЙСТВО БЛОКИРОВКИ ТРОСОВ ТЯГ ПАЛЬЦЕВ ПРОТЕЗА КИСТИ РУКИ (3 ВАРИАНТА), УСТРОЙСТВО УПРАВЛЕНИЯ КОМБИНАЦИЕЙ ПОЛОЖЕНИЯ ПАЛЬЦЕВ ПРОТЕЗА КИСТИ РУКИ (2 ВАРИАНТА) | 2017 |
|
RU2664171C1 |

Группа изобретений относится к медицине, а именно к устройствам односхватного электромеханического протеза кисти. Устройство состоит из электродвигателя, многоступенчатой или одноступенчатой зубчатой цилиндрической передачи, червяка и червячного колеса. Ведущая шестерня зубчатой передачи соединена с валом электродвигателя. Червячное колесо, тяга и искусственный большой палец схвата образуют механизм шарнирного четырёхзвенника. Достигается возможность смены формообразующих оболочек без разборки механизма, обеспечение защиты деталей механических передач от повреждений и загрязнений при том, что конструкция обеспечивает силу хвата выше 35 Н. 4 н. и 3 з.п. ф-лы, 4 ил.
1. Устройство односхватного электромеханического протеза кисти, состоящее из по меньшей мере одного электродвигателя или планетарного мотор-редуктора или волнового мотор-редуктора или циклоидального мотор-редуктора или цилиндрического зубчатого мотор-редуктора, по крайней мере одной многоступенчатой или одноступенчатой зубчатой цилиндрической передачи, по крайней мере одного червяка, по крайней мере одного червячного колеса, при этом ведущая шестерня зубчатой передачи соединена с по меньшей мере одним выходным валом электродвигателя или планетарного мотор-редуктора или волнового мотор-редуктора или цилиндрического зубчатого мотор-редуктора, а червячное колесо, тяга и искусственный большой палец схвата образуют механизм шарнирного четырёхзвенника.
2. Устройство по п.1, содержащее тягу блока пальцев, соединяющую большой палец с блоком пальцев, так, что большой палец, тяга блока пальцев и часть кисти образуют второй механизм шарнирного четырехзвенника так, что при повороте большого пальца часть кисти, содержащая блок пальцев, поворачивается в противоположном направлении.
3. Устройство по п.1, в котором многоступенчатая зубчатая передача защищена герметичным корпусом.
4. Устройство по п. 1, в котором червячная передача закрыта кожухом, который состоит из верхней и нижней части и имеет только одну щель для выхода тяги наружу.
5. Устройство односхватного электромеханического протеза кисти с двумя тягами блока пальцев, одна из которых соединяет блок пальцев с большим пальцем, а другая – блок пальцев с червячным колесом, состоящее из по меньшей мере одного электродвигателя или планетарного мотор-редуктора или волнового мотор-редуктора или циклоидального мотор-редуктора или цилиндрического зубчатого мотор-редуктора, по крайней мере одной многоступенчатой или одноступенчатой зубчатой цилиндрической передачи, по крайней мере одного червяка, по крайней мере одного червячного колеса, при этом одна из тяг соединяет блок пальцев с большим пальцем, а другая – блок пальцев с червячным колесом, так что червячное колесо, тяга большого пальца, большой палец и кожух образуют механизм рычажного четырехзвенника, а большой палец, тяга блока пальцев, блок пальцев и кожух образуют другой механизм шарнирного четырехзвенника.
6. Устройство односхватного электромеханического протеза кисти с неподвижным блоком пальцев, состоящее из по меньшей мере одного электродвигателя или планетарного мотор-редуктора или волнового мотор-редуктора или циклоидального мотор-редуктора или цилиндрического зубчатого мотор-редуктора, по крайней мере одной многоступенчатой или одноступенчатой зубчатой цилиндрической передачи, по крайней мере одного червяка, по крайней мере одного червячного колеса, при этом ведущая шестерня зубчатой передачи соединена с по меньшей мере одним выходным валом электродвигателя или планетарного мотор-редуктора или волнового мотор-редуктора или цилиндрического зубчатого мотор-редуктора, а червячное колесо, тяга и искусственный большой палец схвата образуют механизм шарнирного четырехзвенника.
7. Устройство односхватного электромеханического протеза кисти с неподвижным большим пальцем, состоящее из по меньшей мере одного электродвигателя или планетарного мотор-редуктора или волнового мотор-редуктора или циклоидального мотор-редуктора или цилиндрического зубчатого мотор-редуктора, по крайней мере одной многоступенчатой или одноступенчатой зубчатой цилиндрической передачи, по крайней мере одного червяка, по крайней мере одного червячного колеса и блок пальцев, тяга которого соединяет блок пальцев с червячным колесом так, что блок пальцев, тяга блока пальцев, червячное колесо образуют механизм шарнирного четырехзвенника.
| МЕХАНИЗМ СХВАТА ДЕТСКОГО ОДНОСХВАТОВОГО БИОЭЛЕКТРИЧЕСКОГО ПРОТЕЗА ВЕРХНЕЙ КОНЕЧНОСТИ | 2019 |
|
RU2719658C1 |
| DE 323970 C, 13.08.1920 | |||
| CN 208710183 U, 09.04.2019 | |||
| US 6660043 B2, 09.12.2003 | |||
| US 6921419 B2, 26.07.2005 | |||
| MX 2014004185 A, 07.10.2015 | |||
| CN 203598078 U, 21.05.2014 | |||
| US 3538515 A1, 10.11.1970 | |||
| CN 101919755 B, 27.06.2012 | |||
| CN 210077960 U, 18.02.2020 | |||
| CN 106038004 B, 02.03.2018 | |||
| CN 209933079 U, 14.01.2020. | |||

