Под симпатическим управлением электроприводом подразумевают такое управление, когда перемещение управляющей рукоятки на определенный угол вызывает поворот (или линейное перемещение) исполнительного механизма в ту же сторону и на соответствующий угол.
Существуют различные системы симпатического управления, основанные:
1) на сравнении напряжений или токов, подводимых к реле, включающему исполнительный электродвигатель,
2) на принципе мостика Уитстона,
3) на применении системы следящих полуколец с перемещающимся по ним ползунком;
4) на применении сельсинов и т.п.
В данном изобретении за основу взято устройство, использующее дающие и следящие коммутаторы, контактные поля которых электрически соединены так, что двигатель электропривода работает при рассогласовании коммутаторов и автоматически выключается в момент установки следящих коммутаторов в положение согласования.
Сущность изобретения сводится к тому, что, с целью обеспечения действия устройства при трехпроводной линии связи, в качестве следящих коммутаторов применены два электромагнитных шаговых переключателя по типу телефонных искателей, которые управляют цепью контакторов «вперед» и «назад» двигателя совместно с механическим прерывателем, приводимым в действие от вала двигателя.
Предлагаемый импульсный принцип симпатического управления по мнению изобретателя имеет следующие преимущества:
1) весьма высокую чувствительность, так как каждое небольшое перемещение, задаваемое приводу, может быть разбито на 25 частей (по числу контактов искателя), и схема после каждой отработки приходит в исходное положение.
Если же перемещения, задаваемые приводу сравнительно велики, то высокая чувствительность может быть получена за счет применения каскадного соединения двух искателей;
2) незначительный расход энергии;
3) наличие обратной связи - перемещение щетки второго искателя;
4) возможность применения постоянного и переменного токов;
5) автоматическая остановка привода в заданном положении, тогда как в некоторых известных схемах необходимо следить за прибором, указывающим положение привода и в нужном месте отключать двигатель;
6) устройство может найти применение и в системах авторегулирования, так как изменение почти любого регулируемого параметра может быть легко преобразовано в электрические импульсы;
7) возможность осуществления телемеханических симпатических систем, так как команды подаются импульсами, для которых расстояние не имеет значения;
8) осуществление устройства требует несложной аппаратуры.
Действие предлагаемого устройства основано на сравнении количества электрических импульсов, посланных в телефонный искатель поворотом рукоятки датчика, и импульсов, посланных электродвигателем, который отрабатывает заданное перемещение. При наступлении равенства в количестве посланных импульсов, двигатель автоматически останавливается.
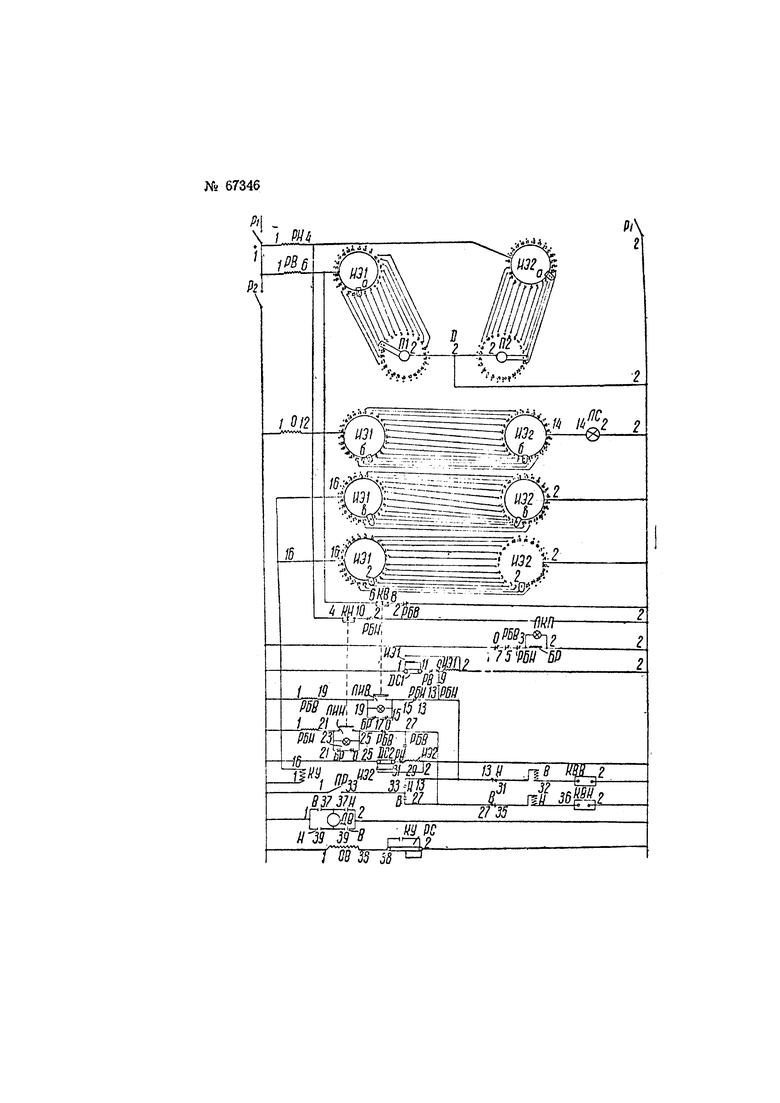
На прилагаемом чертеже представлена схема одного из возможных вариантов импульсного устройства для симпатического управления, иллюстрирующая ее основные принципы.
В схеме применены следующие электрические приборы:
а) Телефонные искатели ИЭ-1 и ИЭ-2.
б) Электромагнитные реле РН, РВ, РБН, РБВ, О, БР.
в) Пусковые кнопки KB и KH.
г) Добавочные сопротивления ДС-1 и ДС-2.
д) Сигнальные лампы ЛС, ЛКП, ЛИВ, ЛИН.
е) Контакторы В, Н и KУ.
ж) Конечные выключатели KBB и KBH.
з) Регулировочное сопротивление PC.
и) Двигатель ДВ с обмоткой возбуждения ОВ.
к) Прерыватель ПР.
л) Датчик Д.
Датчик устроен таким образом, что при повороте управляющей рукоятки вправо и влево два ползунка П-1 и П-2 вращаются только в одном направлении и скользят по контактному полю. Это позволяет сохранить соответствие положения рукоятки и привода.
Подготовка схемы осуществляется следующим образом.
При включении рубильника Р-1 оживляются током реле РБ и РН, которые размыкают свои нормально-замкнутые контакты (9-11 и 29-31) в цепи катушек искателей ИЭ-1 и ИЭ-2.
При включении рубильника Р-2 оживляются током катушки реле О, РБВ и РБН и контакторов В и Н.
Реле О, срабатывая быстрее контакторов В и Н, размыкает свои нормально - закрытые контакты (23-25 и 15-17) в цепях катушек РБВ-В и РБН-Н. В цепи последних включаются последовательно лампы ЛИН и ЛИВ и снижают величину тока в этих цепях настолько, что он становится недостаточным для втягивания сердечника.
Таким образом, после включения рубильников Р-1 и Р-2 обтекается током реле О и горят лампы ЛС, ЛИН и ЛИВ. Горение лампы ЛС (лампа соответствия) указывает на соответствие положения рукоятки положению привода.
Горение ламп ЛИВ и ЛИН (ламп исправности линии - вперед и назад) указывает на исправность двух проводов связи.
Перемещение управляемого привода, например, на 10 ступеней вперед, осуществляется поворотом рукоятки датчика вправо на 10 делений (ползуны П-1 и П-2 переместятся на 10 контактов вперед). Это есть только предварительное задание перемещения, которое никаких изменений в схеме не вызовет, так как катушки РВ и РН имеют цепи помимо ползунов П-1 и П-2, а именно: 1-РН-4-KH-10-РБН-2 и 1-РБ-6-KB-8-РБВ-2.
Исполнительный импульс задается при нажатии кнопки KB. Реле РВ, потеряв возбуждение, замкнет свой контакт 9-11 в цепи искателя ИЭ-1. Через катушку искателя ИЭ-1 потечет ток и так как сопротивление ДС-1 шунтировано, то этот ток будет достаточным для втягивания сердечника. Сердечник ИЭ-1, втянувшись, переместит щетки искателя на один шаг и переключит свой контакт ИЭ-1. Мри этом дешунтируется сопротивление ДС-1 и закоротится катушка искателя ИЭ-1. Катушка отпустит свой сердечник, отчего снова закоротится сопротивление ДС-1 и дешунтируется катушка. Искатель делает еще один шаг и т.д. до тех пор, пока щетки искателя не сделают 10 шагов. В этом случае вновь начнет обтекаться током реле РВ, так как его цепь замкнулась через щетку а искателя ИЭ-1, связывающий провод и ползун П-1.
Обтекаемое током реле РВ размыкает контакт 9-11 в цепи катушки искателя ИЭ-1 и приостанавливает дальнейшее движение этого искателя.
Нажимом кнопки KB одновременно шунтируется лампа ЛИВ и увеличивается ток в цепи катушек РБВ и В до величины, достаточной для срабатывания этих реле. Срабатывание контактора В вызывает включение двигателя и начало отработки заданного перемещения. При этом контактор В отключает свой нормально-замкнутый контакт 27-35 в цепи питания контактора Н.
Как только щетка б искателя ИЭ-1 сделала первый шаг, потеряло возбуждение реле О и замкнуло контакт 15-17, шунтирующий кнопку KB в цепи реле РБВ и контактора В.
Получив питание реле РБВ размыкает свой контакт 2-8 в цепи реле PB. Таким образом, если после нажатия кнопки KB искатель ИЭ-1 сделал один шаг, кнопку можно отпустить.
Реле РБВ и контактор В переключили свои блокконтакты 27-35, 27-33 и 27-29, 27-25 и разорвали этим цепь питания контактора Н и реле РБН и подготовили провод (служащий для пуска привода в направлении «назад» для обратной связи.
Во время отработки приводом заданного перемещения периодически замыкается контакт 1-33 прерывателя ПР. Так как прерыватель ПР жестко связан через редуктор с приводимым двигателем, то каждое замыкание контакта прерывателя ПР фиксирует строго определенное число оборотов, совершенное двигателем, или соответственное перемещение привода.
Каждое замыкание контакта ПР вызывает посылку одного электрического импульса в катушку искателя ИЭ-2 по цепи 1-ПР-33-В-27-РБВ-29-ИЭ-2-2.
Искатель ИЭ-2 будет перемещать свои щетки. Когда ПР даст 9 импульсов, искатель ИЭ-2 сделает 9 шагов и получит питание контактор KУ (уменьшение скорости) по цепи 1-KУ-16-щетка в ИЭ-1 - контакт 11 ИЭ-1 - контакт 10 ИЭ-2 - щетка в ИЭ-2-2.
Таким образом перед полной остановкой привода скорость его снижается, так как в случае больших моментов инерции торможение при полной скорости и получение необходимой точности остановки становится затруднительным.
Из схемы можно видеть, что при задании перемещения, равного одной ступени, отработка его будет производиться на пониженной скорости.
Снижение скорости привода перед полной его остановкой вызывает необходимость прокладки третьего провода связи.
Когда ПР даст десятый импульс, искатель ИЭ-2 сделает 10-й шаг и щетки искателей ИЭ-1 и ИЭ-2 станут друг против друга. Как только это произойдет, получат питание реле О и лампа ЛС, которая будет указывать о выполнении заданного перемещения.
Получив питание, реле О разомкнет свой контакт 15-17 в цепи питания реле РБВ и контактора В, и остановит привод.
Схема приходит в исходное положение.
Положение привода указывается рукояткой датчика, а соответствие положений привода и рукоятки указывается лампой ЛС.
Работа схемы для перемещения привода в направлении «назад» происходит аналогично, с той лишь разницей, что рукоятку следует повернуть против часовой стрелки и для подачи исполнительного импульса нажать кнопку KH. Задающие импульсы будут получать искатель ИЭ-2, а импульсы обратной связи искатель ИЭ-1. Снижение скорости вместо щетки в искателя ИЭ-1 осуществит щетка г искателя ИЭ-2.
Если перемещение задано в одно из конечных положений, то работа все время протекает так, как это было описано выше и лишь в конце цикла отличается тем, что еще до наступления согласованного положения щеток искателей (например, на середине последней ступени) конечный выключатель привода разрывает цепь питания катушек реле и контактора и двигатель останавливается. Так как реле О, РБВ и РБН в этом положении током не обтекаются, то они замыкают свои контакты 1-7, 5-7 и 3-5 и создают цепь питания реле БР и лампы ЛКП.
Реле БР размыкает свои контакты 17-19 и 21- 23 в цепи питания катушек реле РБВ и РБН и контакторов В и Н.
Таким образом, несмотря на то, что реле О замкнуло свои контакты в этих цепях, последние обтекаться током не будут.
Горение лампы ЛКП (лампа конечных положений) указывает на достижение приводом одного из конечных положений, определяемого точно по положению рукоятки и по одной из ламп {ЛИВ или ЛИН), которая в этом положении не горит.
Лампа соответствия ЛС в это время не горит, указывая на то, что между положением рукоятки датчика и приводом есть некоторое рассогласование - конечный выключатель остановил двигатель на половину ступени до согласованного положения. Из этого положения можно задавать перемещения только в сторону противоположную той, в которую привод двигался до этого. Если, например, привод переместился в конечное положение «вперед», то чтобы переместить его назад, следует повернуть рукоятку датчика против часовой стрелки и нажимать кнопку KH. Искатель ИЭ-2 начнет перемещать свои щетки. Так как вследствие конечной остановки привода щетки искателя ИЭ-2 не дошли до согласованного положения со щечками искателя ИЭ-1, то сейчас, при нажатии кнопки KH, когда начнут перемещаться щетки искателя ИЭ-2, они после первого же шага станут против щеток искателя ИЭ-1.
Однако, так как нажатие кнопки длится больше времени, необходимого для одного шага искателя, то мгновенное размыкание контактов в реле О в цепи катушек реле РБН и контактора Н не вызывает остановки привода.
Щетки искателя ИЭ-2, сделав заданное число шагов (предположим пять), остановятся. Щетки же искателя ИЭ-1, перемещаемые от замыкания контактов ПР, для прихода в согласованное положение должны сделать всего четыре шага.
Чтобы сделать четыре шага, привод должен переместиться на расстояние, соответствующее  ступеням, так как от действия KBB он остановился на середине последней ступени.
ступеням, так как от действия KBB он остановился на середине последней ступени.
Таким образом рассогласование привода и рукоятки датчика, которое имеет место в конечных положениях, при выходе из конечных положений автоматически исчезает.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическое весовое дозирующее устройство | 1961 |
|
SU150260A1 |
| Малоканальная система телеуправления | 1954 |
|
SU124341A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ СЛИВА ЖИДКОГО РАСПЛАВА | 1966 |
|
SU181708A1 |
| Устройство для тревожной одно-шлейфной сигнализации | 1931 |
|
SU33834A1 |
| Автоматическое счетно-отключающее устройство | 1937 |
|
SU54449A1 |
| Устройство тревожной одно-шлейфной сигнализации | 1931 |
|
SU38457A1 |
| Коммутационное устройство для многопрограммного вещания по абонентским линиям машинных АТС | 1938 |
|
SU57445A1 |
| Многолучевое устройство для электрической пожарной сигнализации | 1929 |
|
SU32969A1 |
| УСТРОЙСТВО ДЛЯ ТЕЛЕФОНИРОВАНИЯ | 1924 |
|
SU12086A1 |
| Автоматический цифровой электроизмерительный прибор | 1958 |
|
SU119292A1 |
Устройство для симпатического управления электроприводом при помощи дающих и следящих коммутаторов, контактные поля которых электрически соединены так, что двигатель электропривода работает при рассогласовании коммутаторов и автоматически выключается в момент установки следящих коммутаторов в положение согласования с дающими коммутаторами, отличающееся тем, что с целью обеспечения действия устройства при трехпроводной линии связи, в качестве следящих коммутаторов применены два электромагнитных шаговых переключателя ИЭ-1 и ИЭ-2 типа телефонных искателей, управляющих через посредство системы электромагнитных реле цепью контакторов KB (вперед) и KH (назад) двигателя совместно с механическим прерывателем, приводимым в действие от вала двигателя.
