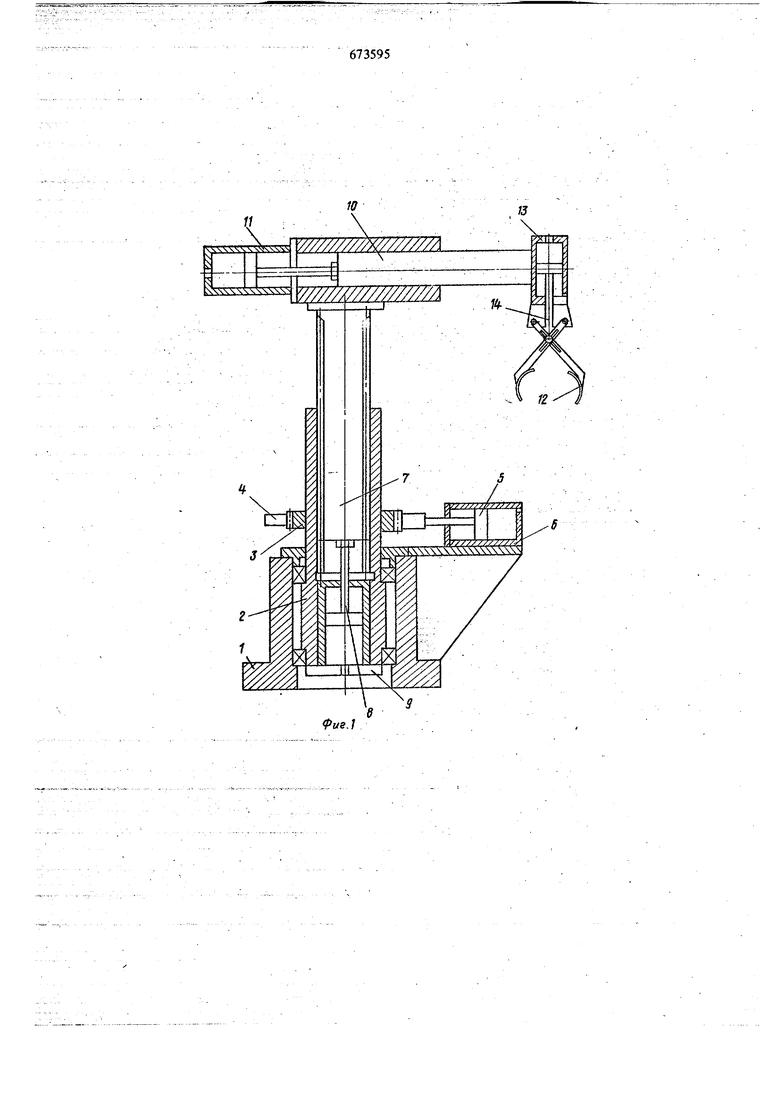
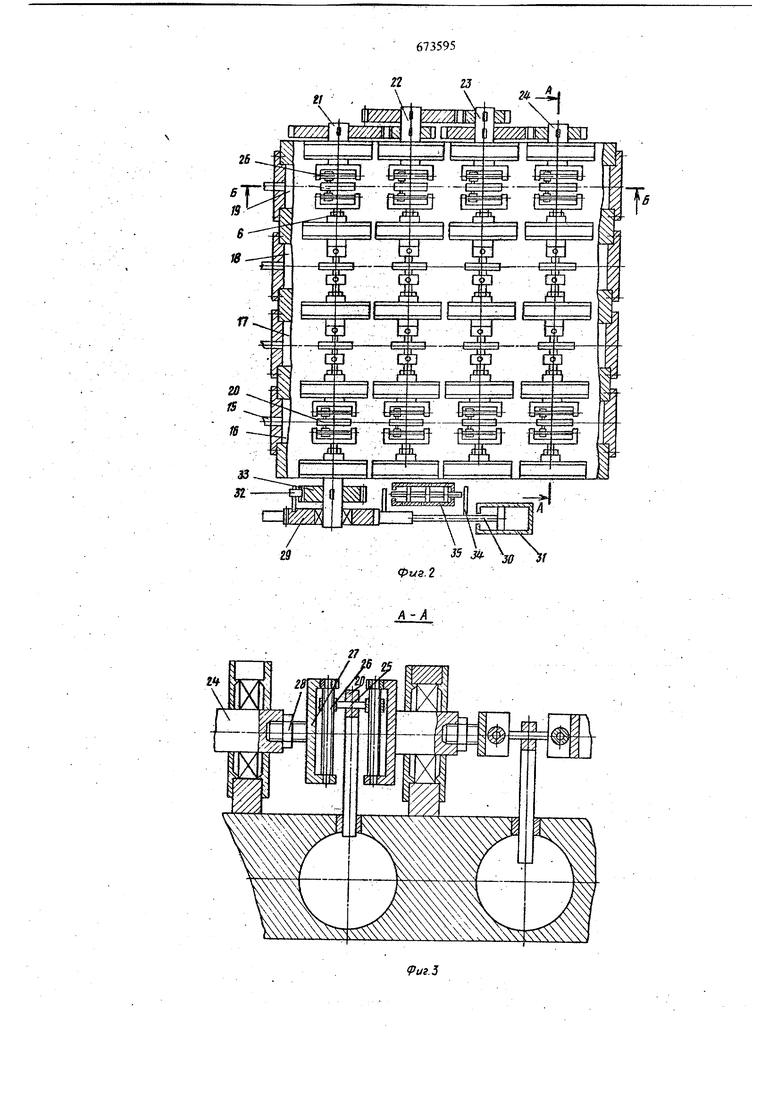
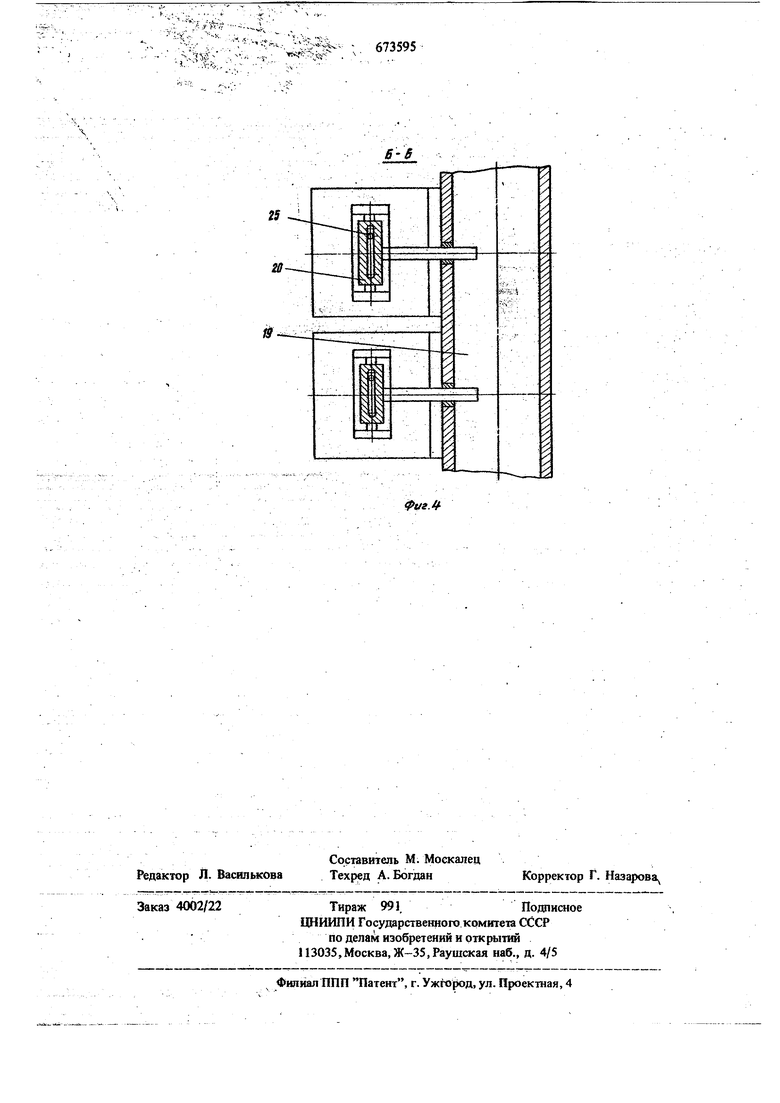
(54) ГИДРАВЛИЧЕСКИЙ МАНИПУЛЯТОР С МЕХАНИЧЕСКОЙ СИСТЕМОЙ ПРОПРАММНОГО УПРАВЛЕНИЯ клещевой захватный орган с губками 12 и гадравлическнй привод их перемещения с корпусом 13 и штоком 14 поршня. Поршень каждого гидравлического циливдра 6, 9, 11, 13 со стороны штоков подпружинен, например, путем соединения иггоковых полостей этих цилиндров с HCTOMHiJKOM сжатого воздуха. Подпоршневые полости каждого гидравтачес-. кого цилиндра 6, 9, 11, 13 гидравлически попарно соединены трубопроводами 15 соответстйецно с рабочими полостями 16, 17, 18, 1.9 ; и корпусе отдельных плунжерных насосов |а)мандоаппаратов с рядом плунжеров 20. Каждый плунжер 20 на своем конце имеет поперечный паз. На корпусе полостей 16-19 установ лены и подшипниках коленчатые валы 21-24, с кривошипами 25, регулируемыми в радиальном направлении с помощью винтов 26. Щеки 27 колёнчйтьгх балов выполнень разъемными и сбёддаецными между собой резьбовыми собдинешялй с контргайкой 28, что позволяет их рёгуш ование относительно друг щ)уга Ё угловом направлении. Коленчатые валы 21-24 .соединены между собой кинематически посредством зубчатых колес с обеспечением между ними передаточных отношений, пропорциональных отношению их порядковых номеров 1,2,...п Коленчатые валы-21-24 кинематичес1сй связаны с плунжерами 20 посредсгаом кривошипов 25, гомещёвных в поперечные пазь плунжеров, и образуют с последаими отдельные синусные механизмы. Причем каждый. плунжер отдельных полостей 16-19 соединен лишь с одним из коленчатьрс валов 21-24. На коленчатом вале 21, имевшем, например, первый порядковый шмбр и наименьгиу углсву скорость по сравнению с остальньпли коленчатыми валами, усганЬёЛёна йа подшйшпйсах приводная шестерня 29, которая сопряжена с peйкoйV вьшолненяой на штоке 30 гйдравлическогб щшиндра 31, а также кщематически связана посредством собачки 32 е храповым колесом 33, кесткр у8:1зеш1ёвдыМ на колешатом вале. JHfia .автоматического управления работой приводного цилиндра 31 и огракйченмя дяины двойного хода 30 на последнем установлены два регулируемых упора 34 для воздействия ими в крайшх Шл6ж1Е нийх н8 ШрШёр вого золотника 35, укрепленного на стойке и сообщенного с источником давления жидкости гидронасосом. Расстояние между упорами 34 должно быть меньшим от длины начальной окружности шестерни 29 в целое число . Манипулятор работает следующим образом- В начальный момент времени поршень гидравлических-цилиндров 6, 9, И, 13, находится в своем исходном устойчивом положении год действием давления сжатого воздутса в штоковых полостях с одной стороны и реакции жидкости в подпорщневых полостях щшиидров и рабочих полостях 16, 17, 18, 19 корпуса плунжерных насосов - командоаппаратов с другой стороны, а поршень цилиндра 31 занимает свое крайнее положение со стороны подпоршневой полости, и один из упоров, взаимодействуя с: плунжерод золотника 35, обеспечивает подачу рабочей жидкости от источника ддвле нил (насоса) в подпорщневую полость цилиндра 31. При подаче рабочей жидкости от источника давления к золотнику и затем в подпоршневую полость цилиндра 31 поршень со штоком 30 будет перемешаться в сторону шгоковой полости до тех пор, пока второй упор 34 не обеспечит переключения золотника 35, сообщение штоковой полости с источником давления и затем перемещение поршня в свое исходное положение. В дальнейшем цикл повторяется автоматически, и поршень со штоком 30 совершает возвратно-поступательное движение. От рейки, выполненной на штоке 30, через сопрягаемую с ней шестерню 29, собачку 32, храповое колесо 33, получает прерывистое вращательное движение коленчатый вал 21. Так как дайна начальной окружности шестерни 29 является кратной длине хода поршня со штоком 30, то через целое число двойных ходов этого штока коленчатый вал 21 совершает один полный оборот, а остальные - числа оборотов, соответствующие их порядковым номерам: 2, 3, 4, 5,...п, где п - порядковый ярмер последнего коленчатого вала, или количество коленчатых валов. Плунжеры 20, кинематически связанные с {фивошипалет коленчатых валов с образованием отдельтаис синусшх меха1шзм: в, совершают осевые перемещения но гармошиескому закону от утпй поворота соответствующего кривошипа, вьггесняя жидкость из полостей 16-19, и обеотечивают перемещение поршней гидравлических цилиндров 6, 9, 11, 13 и звеньев механизма манипулятора: колонны 2, ползуна 7, каретки to, губок 12 захватного органа. Величиш перемещения любого поршня цилиндров. 6, 9, II, 13, как функция « от угла f, поворо ta коленчатого вала 21 пропорциональна сум- - марному объему вытесненной плунжерами 20 жидасости из шответствующей полости и равна следукедей сумме членов, представляющей со конечную членов ряда Фурье: )о,)(2Ч,+% J -Ь )-.(,-4o,xb где RI, RI, ... Rp -величины эксцентриситетов кривошипных пальцев (кривошипов) колен-. чатых валов, соответствующих порядковым номерам 1,2,3,-.,п;Si Sj, 83, ...,Sn - площади поперечных сечений плунжеров, связанных с коленчатыми валами соответствующих порядковых номеров . fo2r--j on - начальные угловые пЬйожения кривошипных пальцев, принадлежащих коленчатым валам с порядковыми номерами соответственно ,2,3,..,п; F - площадь поперечного сечения поршня любого из рассматриваемых щотиндров 6,9,11, По заданной наперед необходимой функции 1 перемещений порщня каждого цилиндра 6, 9, 11, 13, пользуясь известным математическим методом разложения ее на периоде в ряд Фурье и определяя, . коэффициенты членов ряда кгТ а также VJQI Voz..-v/on . а затем их обеспечивая в уетройсгае. путем регулирования Величин эксцешриситетов kpaвощипных пальцев (Rj, Rj, Вз,..,Вп), и их углового положения (ipoi iPoa. Voa.-iVofi ) достигают периодическое перемещение каждого поршня по наперед заданному закон) на перио де, равном полнол обороту 2 21. При этом тошость воспроизведения даижения порш ней цилиндров 6, 9, И, 13 по наперед заданному закону повьшиется с увеличением количества коленчатых валов. В результате перемещений по наперед заданному закону поршней цилиндров 6,9,11,13 и соединенных сними звеньев механизма манипулятора корпус захват но го органа совершает в пространстве замкнутую необходимую траекторию за время одного полного оборота коленчатого вала 21с .периодическим повторением этой траектории через период и остановками в некоторых фиксированных положениях, соответствуюцщх холостом ходу щестерни 29 с собачкой 32. При работе манипулятора в режиме изопозицирования, где лиминтирующим фактором является точцо ь фиксированных положений каждого поршня цилиндров при их периодической стоянке, а воспроизведение требуемой траектории не шля ется существенным, тогда величины RI, Ra/ R3...,Rn и (Poi, o2.-,Von устанавливают на устройстве такими, чтобы они удовлетворяли следующей системе уравнений: ,к., )b(l 2 -( ( S 2% . V -F-Чкй Ч sinfeji ТОе у,. Уз, УЗ....УП - координаты фиксиро- ва1шых положений поршня любого из цилиндров 6,9,11,13, отсчитьшаемые от начала системы координат, связагоюй с корпусами соответствующих цилиндров; К - количество требуемых фиксированных положений любого из поршней не считая начального, или качество двойных ходов штока 30 за время одггого полного оборота шестерни 29, которое не может быть бoльши f, чем удвоенное число всех коленчатых валов, то есть 2л, Предлагаемый макипзглятор может работать в цикловом режиме с точным обеспечением заданных фиксированных положений порышей цилиндров 6,9,11,13, а следовательно, каждого звена механизма манипулятора; в движения по наперед заданному закону для каждого звена механизма манипулятора, а следовательно, и наперёд заддшгой траектории в пространстве карет и с захватным органом, однако, с некоторой погрешность ее воспроизведения, зависящей от количества коленчатых валов. Формула изобретения Г щравлический манипулятор с механической системой программного управления, содержащий управляемый гидроцил$шдрами многозвешаш меха1юзм, состоящий из корпуса, установленной в нем колонны, подвижной в круговом и осевом направлениях, и каретки с зяхватнь1М рабочим органом, смонтированной в направляюцдах колонны, и командоаппарат, отличающийся тем, что, с целью упрощения консфукции манипулятора и повышения его наежности, командоаппарат содержит многоплунерный-насос и коленчатые валы, при этом аждый гвдроцилиндр сообщен с многоплунврным насосом, плунжеры которого кинемаически соединены с коленчатыми: валами, егулируемыми в радиальном и круговом наравлениях Кривошипами и обеспечивающими ередаточные отношения, соответствующие отошениям их порядковых номеров. Источники информации, принятые во внимаие при экспертазе 1. Беляннн П. Н. Промьшшенньге робота, Машиностроение, М., 1975, с. 70-75.
1
У////////Щ777777Л
NNNNN N NN-j{ / //
t
Риг
г/
26
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая коробка передач | 1949 |
|
SU92717A1 |
| Функциональный преобразователь | 1976 |
|
SU598058A1 |
| Двигатель внутреннего сгорания | 1985 |
|
SU1268770A1 |
| Система управления гидравлическим прессом | 1978 |
|
SU747739A1 |
| ПОРШНЕВОЙ КОМПРЕССОР С АКТИВНЫМ ОХЛАЖДЕНИЕМ | 2015 |
|
RU2614473C1 |
| ФРИКЦИОННОЕ ПРЕДОХРАНИТЕЛЬНОЕ УСТРОЙСТВО | 1967 |
|
SU198139A1 |
| ГИДРОМЕХАНИЧЕСКАЯ СИСТЕМА ПРИВОДА КЛАПАНОВ ДВИГАТЕЛЯ И СПОСОБ ЕЕ ПРИМЕНЕНИЯ | 2008 |
|
RU2448261C2 |
| Гидроцилиндр с замком | 1976 |
|
SU615259A1 |
| Способ автоматизации работы подающего аппарата пилигримового стана | 1960 |
|
SU142617A1 |
| Гидравлический пресс с большим холостым ходом | 1961 |
|
SU148328A1 |
25
