(54) ПОДЪЕМНОЕ УСТРОЙСТВО ДПЯ ПРИДИЗИШНОЙ BbffiEPKH И УСТАНОВ1Ш ОСНОВАНИЯ ГСМРИЗШТ
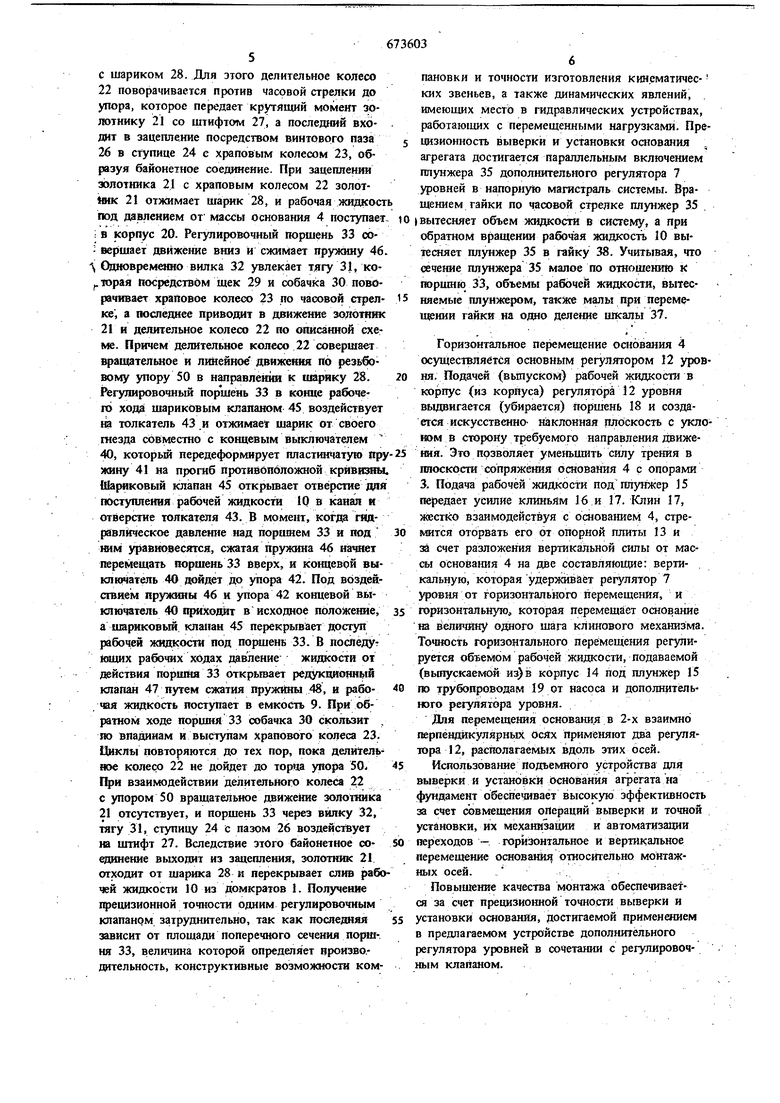
на фиг.1; на фиг.3 - разрез Б-Б на фиг.1; на фиг.4 - разрез В-В на фиг-3; на фиг,5 - байонетное соединение.
Подъёмное устройство для прецизионной выверки и установки агрегата содержит опорные гидравлические домкраты 1 с плунжерами 2, снабженными сферическими опорами 3 для установки основания 4. Опорные гидравлические домкраты 1 трубопроводами 5 соединены между собой и с регулировочным клапаном 6, снабжённым дополнительным регуляторЬм 7 уровня, плунжерным насосом 8, емкостью 9 для рабочей жидкости 10, установленной на фундаменте 11. Между домкратами I установлен основной регулятор 12 уровня, опорная ппита 13 которого контактирует с основанием 4 и тем самым замыкает MexaittWeCiKyiio схему. Регулятор 12 у1Х)вня представляет ;србЬй домкрат, обеспечивает вертикальное и горизонтальное перемещение основания и включает кор пус 14 с плунжером 15, поворотный клиновой механизм с клиньчми 16 и 17, поршень 18 и трубопрО:воды 19 для автономного привода. Регулйроврчнь|й клапан б содержит корпус 20, в котором смонтирован золотник 21, взаимодействующий пОдвизкно С делительнЬ1м 22 и храповым 23 колесами, пОсажёНйьпуш на золотник 21, конт-актирующий посредством байонетного соедийешя, включающего ступицу 24 с прямь1м 25 и вгагговым 26 пазами, и штифта 27, жестйЬ соединенного с золотником 21 с шариком 28 обратного клапана. На ступицу 24 свободно посажены щеки ПОл йжными собачкой 30 и тягой 31, которая цириирно соединена вилкой 32 с регулировочньш порщнем 33, расположенным в цилиндре34, которьгй жестко прйсюедащен к ; корпусу 20. На корпусе 20 установлен дополнительный регулятор 7 уровня, включающий плунжер 35, подвижно расположенный во втулке 36 с нарухдаой резьбой и шкалой 37, по которой перемещается торец глухой тайки 38, сопряженной с торцрм плунжера 35. Рабочая мдадкость .10 поступает к ллунжеру 35 МкЗтлШу 39 от oiiopHbtx домкратов 1, В регулировочном поршне 33 установлен гидравлический концевой вйключатель 40 с пластинчатой пружшюй 41, расположенной в кольцевом пазу регулйро точного порытая 33. Пружина 41 подвижно взаимодействует посредством упора 42, толкателя 43 с отверстием я каналом 44, концевого вьжлючателя 40 сшариковым клапаном 45. В цилиндре 34 под поршнем 33 jpaciiOHOжена цилиндрическая пруяоша 46 сжатия. Емкость 9 для рабочей Жидкости ТбТя Еоедйне- на жестко к цилинл у 34 пОсред«вом редукшюнного клзпаяа 47 с пруядшой 48. На целительном колесе 22 нанесена шкала 49, которая
Может перемещаться относительно резьбового упора 50, жестко присоединенного к корпусу 20 регулировочного клапана 6.
Машина для прецизионной вьгеерки и установки агрегата основания на фундаменте работает следующим образом.
Домкраты 1 устанавливают на фундамент ГГ по периметру основания 4. Насосом 8 рабочую Жида:ость 10 из емкости 9 подают.лод плунжеры 2 в опорные домкраты 1. Пяунукеры 2 выдаигаются. Монтируемое основание 4 монтажным грузоподъемным средством устанавливают на сферические опоры 3 выдвинутых плунжеров 2, оно занишет наклОниое положшие вследствие смещения центра тяжести ооювания. Уровнем, установленным на базовую плоскость основания 4, определяют одау из горизонтальных осей, центра тяжести последнего. Затем под основание 4 по оси его цеттра тяжести со стороны уклона подаодят основной регулятор 12 уровня. По одному из трубопроводов 19 от автономного привода, включающего четырехпозицирнный зОлотник, подается рабочая жидкость под давлением в корпус 14, которая приводит в движение порншк 18, и опорная плита 13 начинает взаимодействовать с основанием 4. Вследствие перерасг еделения объемов рабочей жидкости В домкратах 1, от действия подъелдаой силы основного регулятора 12 уровня основание поворачивается на опорйх
3в ctcqxJHy, противоположную уклону. При дастижешш Основанием 4 горизонталышго поло5«ения,чтд опр еделяют уровнем или другим 1фибором соответствующего класса точности,
подача рабочей жидкости в корпус 14 прекращается. Определяется действительное рассогласование высоты базовой плоскости основания
4от проектаого; которое всегда положительно, так как плунжеры 2 домкратов 1 были предва рительно выдвинуты. Установка основания 4 да требуемую отметку производится путем сгравливаиия мерного объёма рабочей жидкости 10 из домкратов 1. Величину мерного объема определяют путем-умножения величины рассогласования на площадь поперечного сечения всех плунжеров 2 домкратов 1. Полученный результат фиксируется на шкале 49, размерность которой является функцией пути, прой-. денного регулировочным поршнем 33. Для зтого делительное колесо 22 вращается по часовой стрелке относительно резьбового упора 50 на . требуемое количество делений шкалы 49. При этом делительное колесо 22 скользит по лыскам золотника 21 и приводит последний совместно с храповым колесом 23 во вращательное движение. Последнее свободно поворачивается относительно собачки 30. Устанавливается мерный объем и открывается обратный клапан

| название | год | авторы | номер документа |
|---|---|---|---|
| ; ВСЕСОЮЗНАЯ | 1973 |
|
SU373252A1 |
| Гидравлический домкрат для вертикального и горизонтального перемещения груза | 1979 |
|
SU787350A1 |
| Пневмогидравлический дозатор | 1978 |
|
SU764932A1 |
| Устройство для реверсирования винта с автоматическим изменением шага | 1942 |
|
SU67587A1 |
| Пробоотборник-расходомер с автономным приводом | 1981 |
|
SU981856A1 |
| ГИДРАВЛИЧЕСКИЙ ДОМКРАТ | 1999 |
|
RU2165039C1 |
| ГИДРОРАСПРЕДЕЛИТЕЛЬ | 1997 |
|
RU2125188C1 |
| Ручное устройство для сборки | 1987 |
|
SU1447515A1 |
| ГИДРОГАЗОВЫЙ ПОГЛОЩАЮЩИЙ АППАРАТ | 2021 |
|
RU2778581C1 |
| Устройство для намотки электрических катушек из полосы на ребре | 1976 |
|
SU608235A2 |

.itiU ii 2:iii ii.:.iiib-- - - с шариком 28. Для этого делительное колесо 22 поворачивается прютив часовой стрелки до упора, которое передает крутяпдий момент золотнику 21 со штифтом 27, а последами входат в зацепление посредством винтового паза 26 в ступице 24 с храповым колесом 23, образуя байонетное соедешение. При зацеплении золотника 21 с храповым колесом 22 золотШк 21 отжимает шарик 28, и рабочая жидкост под давлением от массы основания 4 поступает ; в корпус 20. Регулировочный поршень 33 со вершает движение вниз И сжимает 46 Одновременно вилка 32 увлекает тягу 31, ко торая посредством щек 29 и собачка 30 поворачивает храповое колесо 23 по часовой стрелке, а последнее приводит в движение золотник 21 и делительное колесо 22 по описанной схеме. Причем делительное колесо 22 совершает враощтельное и линейное движения по резьбовому упору 50 в направления к шарику 28. Регулировочный поршень 33 в конце рабочего хода шариковым клапаном 45 воздействует ю толкатель 43 .и отжимает шарик от своего гнезда совместно с концевым выключателем 40, который передеформирует пластинчатую Пр жину 41 на прогиб противоположной кривизны Шриковый клапан 45 открьюает отверстие ЩЁЯ поступления рабочей жидкости Ш в канал и отверстие толкателя 43. В момент, когда гидравлическое давлеште над поршнем 33 и под Ш1М уравновесятся, сжатая пружина 46 начнет перемещать поршень 33 вверх, и концевой выключатель 40 дойдет до упора 42. Под воздейсгонем прушшы 46 и 42 концевой выключатель 40 приходит в исходаое положение, а шариковый клапан 45 перекрывает доступ рабочей ЖИД1СОСТИ под поршень 33. В посяеду ifomx рабочих хОдах давление жидкости от действия поршня 33 открьгоает редукциоянмй клапан 47 путем сжатия пружины 48, в рабо/чая жидкость поступает в емкость 9. При обратном ходе поршня 33 собачка 30 скользит 1Ю впадинам и выступам храпового колеса 23. Циклы повторяются до тех пор, пока делительное колесо 22 не дойдет до торца упора 50 При взаимодействии делительного колеса 22 с упором 50 вращательное даижение золотника 21 отсутствует, и поршень 33 через вилку 32, тягу 31, ступицу 24 с пазом 26 воздействует на штнфт 27. Вследствие этОго байонетное соединение выходит из зацепления, золотник 21. отходит от шарика 28 и перекрывает слив рабо чей жидкости 10 из домкратов 1. Получение 1фецизионной точности одним регулировочным клапаном затруднительно, так как последняя зависит от площада поперечного сечения поршня 33, величина которой определяет вроизводительность, конструктивные возможности компаковки и точности изготовления кинематических звеньев, а также динамических явлений, имеющих место в гидравлических устройствах, работающих с перемешенными нагрузками. Прецизионность выверки и установки основания агрегата достигается параллельным включением плунжера 35 дополнительного регулятора 7 уровней в напорную магистраль системьг. Вращением гайки по часовой стрелке плунжер 35 вытесняет объем жидкости в систему, а при обратном вращении рабочая жидкость 10 вытеошет плунжер 35 в гайку 38. Учитывая, что сечение плунжера 35 малое по отнглменин) к поршню 33, объемы рабочей жидкости, вытесняемые плунжером, также малы при перемещении гайки на одао деледае шкалы 37. Горизонтальное перемещение основания 4 осуществляется основным регулятором 12 уровня. Подачей (выпуском) рабочей жидкости в корпус (из корпуса) регулятора 12 уровня выдаигается (уй1рается) поршень 18 и создается искусственно- наклонная плоскость с уклоном в сторону требуемого направления движення. Это позволяет уменьшить силу трения в лвюскости сопряжения основания 4 с опорами 3. Подача рабочей жидкости под плунжер 15 передает усилие клиньям 16 и 17. Клин 17, жестко взаимодействуя с основанием 4, стремится оторвать его от опорной плиты 13 и за счет разложения вертакальной силы от массы основания 4 на две составляющие: верти- . кальную, которая удерживает ре1упятор 7 уровня от горизонтального перемещения, и горизонтальную, которая перемещает основание на величину одного шага клинового механизма. Точность горизонтального перемещения регулируется объемом рабочей жидкости, подаваемой (вь01ускаемой из) в корпус 14 под плунжер 15 по трубопроводам 19 от насоса и дополнительного регулятора уровня. Дяя перемещения основания в 2-х взаимно перпендикулярных Осях применяют два регуля:тора 12, располагаемых вдоль зтих осей. Использование подъемного устройства для выверки и установки Основания агрегата на фундамент обеспечивает высокую эффективность за счет совмещения операций вьгоерки и точной установки, их механизации и автоматизации переходов - горизонтальное и вертикальное перемеииение основания относительно монтажных осей. Повышение качества монтажа обеспечивается за счет прецизионной точности выверки и установки осиованйя, достигаемой применением в предлагаемом устройстве дополнительного регулятора уровней в сочетании с регулировочным клапаном. Формула изобретения Подъем}ше устройство для прецизионной выверкя я у стаяовки основания, содержащее oti piate гппфавпические домкраты, Яасос, основ ной регулятор уровня к регулировочный клапан с золотником, взаимодействующим с зубчатым колесом и жгулировочиым поршнем, и соединительные трубопроводы, отличающийс я тем, что, с целью повьпиения эффективноеm в качества монтах(ных работ, регулировочный поршень снабжен гидравлическим концевым выКякйителей, содержаний смонтированную в теле П01ШШЯ пластинчатую пружину с толкателем и Фиг-1 f 2 / Й /5 15 13 If 7 IS 18 19 шариковый клапан, а золотник снабжен подвижно смонтированным на нем делительным {солесом, взаимодействующим посредством зуб(ВТОГО колеса с концевым выключателем, при этом регулировочный клапан снабжен дополнительным регулятором уровня, включенным в его гищ авлическую схему, а основной регуля lup уровня содержит автономный гидравлический домкрат, обеспечивающий вертикалыюе и горизонталы ое перемещение осповаиня. Источники информащ{и, принятые во внимайие при экспертизе 1. Патент Японии N 356415, кл- 83 G 3, |970. 1 6 S //////)У/7Ш/7///////У /iSrv ч. Ox V V хчЧЧЧЧ J Jv «7 «#
фцгЛ
