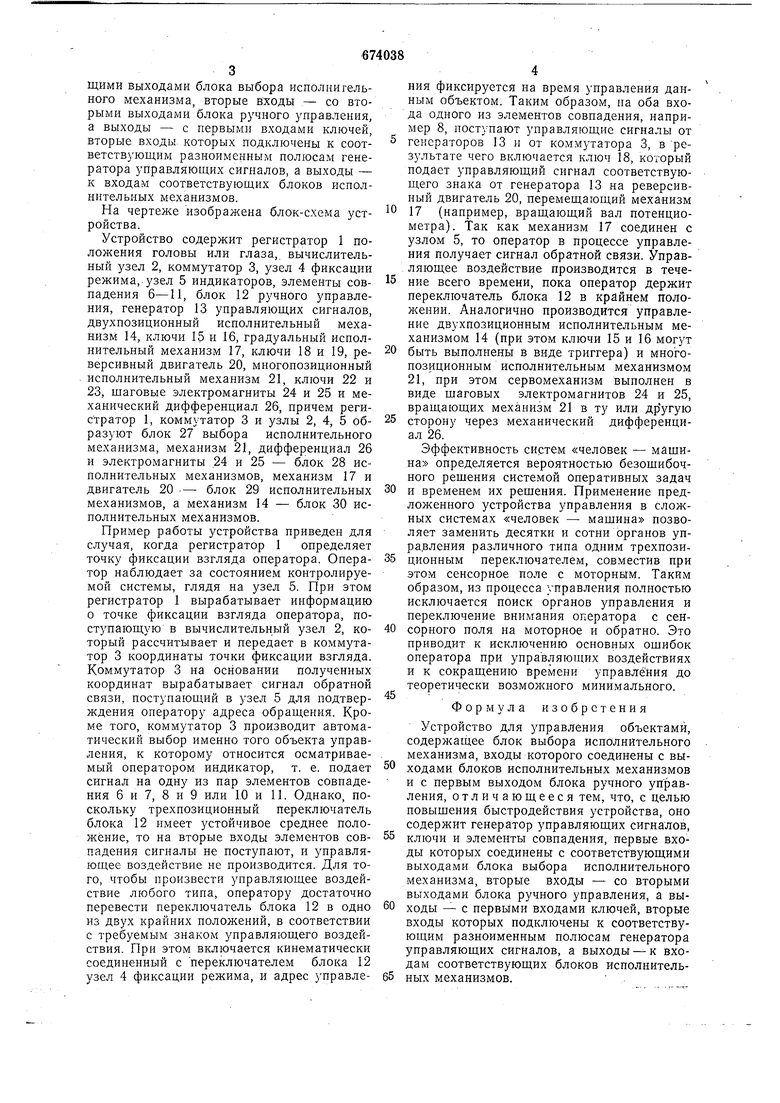
щими выходами блока выбора исполнигельного механизма, вторые входы - со вторыми выходами блока ручного з-правления, а выходы - с первыми входами ключей, вторые входы которых подключены к соответствующим разноименным полюсам генератора управляющих сигналов, а выходы - к входам соответствующих блоков исполнительных механизмов. На чертеже изображена блок-схема устройства. Устройство содержит регистратор 1 положения головы или глаза, вычислительный узел 2, коммутатор 3, узел 4 фиксации режима, ззел 5 индикаторов, элементы совпадения 6-11, блок 12 ручного управления, генератор 13 управляющих сигналов, двухпозиционный исполнительный механизм 14, ключи 15 и 16, градуальный исполнительный механизм 17, ключи 18 и 19, реверсивный двигатель 20, мпогопозиционный исполнительный механизм 21, ключи 22 и 23, шаговые электромагниты 24 и 25 и механический дифференциал 26, причем регистратор 1, коммутатор 3 и узлы 2, 4, 5 образуют блок 27 выбора исполнительного механизма, механизм 21, дифференциал 26 и электромагниты 24 и 25 - блок 28 исполнительных механизмов, механизм 17 и двигатель 20 - блок 29 исполнительных механизмов, а механизм 14 - блок 30 исполнительных механизмов. Пример работы устройства приведен для случая, когда регистратор 1 определяет точку фиксации взгляда оператора. Оператор наблюдает за состоянием контролируемой системы, глядя на узел 5. При этом регистратор 1 вырабатывает информацию о точке фиксации взгляда оператора, поступающую в вычислительный узел 2, который рассчитывает и передает в коммутатор 3 координаты точки фиксации взгляда. Коммутатор 3 на основании полученных координат вырабатывает сигнал обратной связи, поступающий в узел 5 для подтверждения оператору адреса обращения. Кроме того, комментатор 3 производит автоматический выбор именно того объекта управления, к которому относится осматриваемый оператором индикатор, т. е. подает сигнал на одну из пар элементов совпадения 6 и 7, 8 и 9 или 10 и 11. Однако, поскольку трехпозиционный переключатель блока 12 имеет устойчивое среднее положение, то на вторые входы элементов совпадения сигналы не поступают, и управляющее воздействие не производится. Для того, чтобы произвести управляющее воздействие любого типа, оператору достаточно перевести переключатель блока 12 в одно из двух крайних положений, в соответствии с требуемым знаком управляющего воздействия. При этом включается кинематически соединенный с переключателем блока 12 узел 4 фиксации режима, и адрес управления фиксируется на время управления данным объектом. Таким образом, на оба входа одного из элементов совпадения, например 8, поступают управляющие сигналы от генераторов 13 и от коммутатора 3, в результате чего включается ключ 18, который подает управляющий сигнал соответствующего знака от генератора 13 на реверсивный двигатель 20, перемещающий механизм 17 (например, вращающий вал потенциометра). Так как механизм 17 соединен с узлом 5, то оператор в процессе управления получает сигнал обратной связи. Управляющее воздействие производится в течение всего времени, пока оператор держит переключатель блока 12 в крайнем положении. Аналогично производится управление двухпозиционным исполнительным механизмом 14 (при этом ключи 15 и 16 могут быть выполнены в виде триггера) и многопозиционным исполнительным механизмом 21, при этом сервомеханизм выполнен в виде щаговых электромагнитов 24 и 25, вращающих механизм 21 в ту или другую сторону через механический дифференциал 26. Эффективность систем «человек - мащина определяется вероятностью безощибочного решения системой оперативных задач и временем их решения. Применение предложенного устройства управления в сложных системах «человек - машина позволяет заменить десятки и сотни органов управления различного типа одним трехпозиционным переключателем, совместив при этом сенсорное поле с моторным. Таким образом, из процесса управления полностью исключается поиск органов управления и переключение внимания оператора с сенсорного поля на моторное и обратно. Это приводит к исключению основных ошибок оператора при управляющих воздействиях и к сокращению времени управления до теоретически возможного минимального. Формула изобретения Устройство для управления объектами, содержащее блок выбора исполнительного механизма, входы которого соединены с выходами блоков исполнительных механизмов и с первым выходом блока ручного управления, отличающееся тем, что, с целью повыщения быстродействия устройства, оно содержит генератор управляющих сигналов, ключи и элементы совпадения, первые входы которых соединены с соответствующими выходами блока выбора исполнительного механизма, вторые входы - со вторыми выходами блока ручного управления, а выходы - с первыми входами ключей, вторые входы которых подключены к соответствующим разноименным полюсам генератора управляющих сигналов, а выходы -к входам соответствующих блоков исполнительных механизмов.
Источники информации, принятые во внимание при экспертизе
1. Монмоллеи М. Системы «человек-машина. М., «Мир, 1973, с. 56.
2.Венда В. Ф. Инженерная психология я синтез систем отображения информации. М., «Машиностроение, 1975, с. 334.
3.Авторское свидетельство СССР № 541148, кл. G 05В 23/02, 1973 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления печатающим механизмом | 1982 |
|
SU1057308A1 |
| Устройство для испытания @ коммутационных изделий | 1983 |
|
SU1208517A1 |
| Устройство для управления распределенным объектом | 1986 |
|
SU1363144A1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ АККОМОДАЦИИ ГЛАЗА | 1989 |
|
RU2057500C1 |
| УСТРОЙСТВО для РЕГИСТРАЦИИ ОЧЕРЕДНОСТИ ДИСКРЕТНЫХ СОБЫТИЙ ВО ВРЕМЕНИ | 1973 |
|
SU363976A1 |
| УСТРОЙСТВО ДЛЯ ГЕОЭЛЕКТРИЧЕСКОЙ РАЗВЕДКИ | 1987 |
|
RU2018884C1 |
| Термографический регистратор | 1984 |
|
SU1174288A1 |
| Панель синхронизации генераторов учебной электростанции | 1986 |
|
SU1403218A1 |
| Пневматическое устройство управления многоприводным агрегатом | 1986 |
|
SU1355776A1 |
| Устройство для выбора объекта управления | 1977 |
|
SU673990A1 |
