Изобретение относится к частотноуправляемому электроприводу переменного тока и предназначено для исполь зования в системах, в которых требуется высокое качество регулирования. Известны частотно-управляемые эле ктроприводы переменного тока на базе различных машин переменного тока, решающие задачи регулирования с высоким качеством. Наиболее близким к изобретению по технической сущности и достигаемому результату является электропривод с машиной переменного тока, содержащий блок задания составляющих тока статора, блоки прямого и обратного преобразований координат, формирователь ЭДС, а также датчик углового положения, с помощью которого образу ются необходимые для преобразований токов статора гармонические функции . Недостатком известного электропри вода является наличие погрешностей в сигналах управления на выходах блО ков прямого и обратного преобразований координат, обусловленные датчиком углового положения. Цель изобретения - повышение точности работы электропривода с машиной переменного тока за счет улучшения качества формируемых в нем гармонических функций частоты токов (напряжений) статора. Это достигается тем, что в электропривод с машиной переменного тока, содержащий блок задания составляющих тока статора, блоки прямого и обратного преобразований координат, формирователь ЭДС и датчик углового пояснения, введены задатчик тока намагничивания машин и формирователь гармонических функций, ацни из входов которого подсоединены к упомянутому формирователю ЭДС, другие входы через упомянутый датчик углового положения - к задатчику тока намагничивания машин, а выходы - к блокам прямого и обратного преобразований координат. В качестве машины применена синхронная машина, а задатчик тока намагничивания соединен также с упомянутым блоком задания составляющих тока статора; в качестве машины может быть применена асинхронная коротко-замкнутая машина, а задатчик тока намагничивания соединен с упомянутым блоком задания составляющих тока статора и формирователем гармонических функций; кроме того, может быть применена асинхронная машина с фазным ротором, а задатчик тока намагничивния соединен с датчиком фазных токо и напряжений ротора,
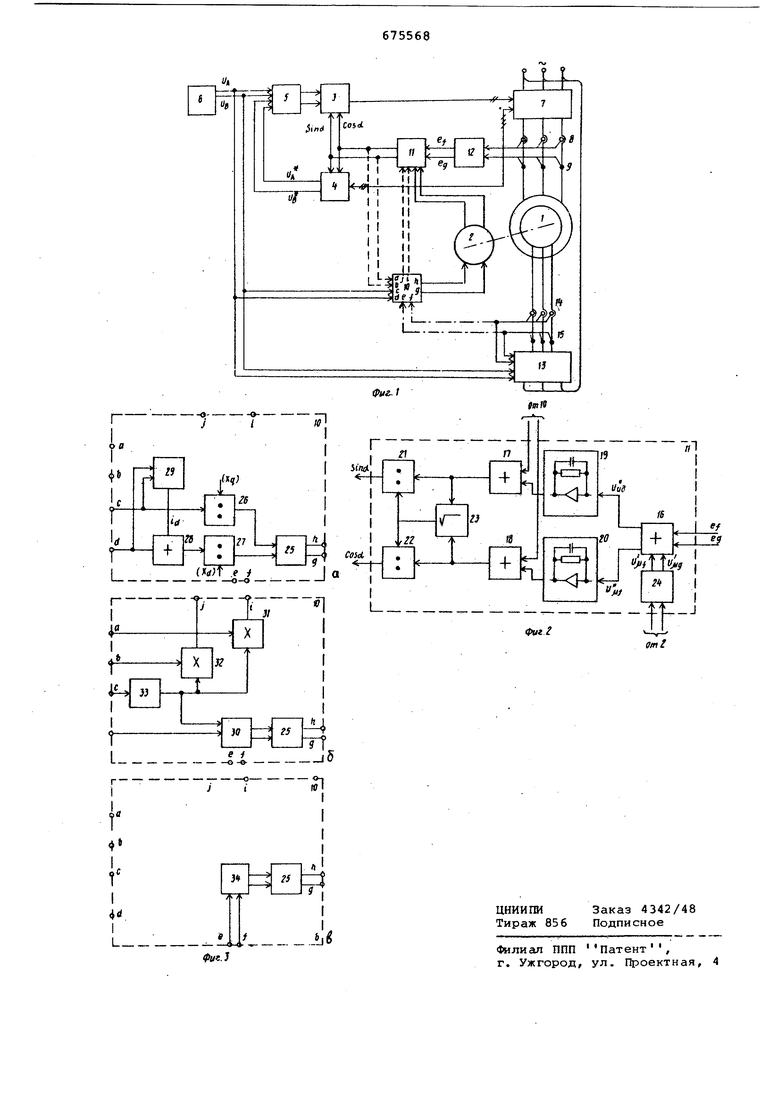
На фиг. 1 дана структурная схема Электропривода переменного тока; на фиг, 2 - структурная схема формирователя гармонических функций, на фиг. 3, а, б, в - структурная схема задатчика тока намагничивания для различных типов машин.
Электропривод содержит машину 1 переменного тока, датчик 2 углового положения, блок 3 прямого преобразования координат, блок 4 обратного преобразования координат, блок 5 регуляторов, блок б задания составляющих тока статора, источник 7 регулируемого питания статора, датчики 8 и 9 фазных токов и напряжений статора, задатчик 10 тока намагничивания машин, формирователь 11 гармонических функций, формирователь 12 ЭДС статора 12.
Ротор машины подключен к источнику 13 регулируемого питания.
В цепях ротора включены датчики 14 и 15 фазных токов и напряжений.
Электропривод на фиг. 1 представлен в разомкнутом виде, как элемент системы регулирования по скорости или углу.
На вход блока 5 регулятора с блока б поступают сигналы задания, составляющих ток.а статора Од и Ug, которые в замкнутом приводе являются выходными сигналами соответствующих регуляторов потокосцепления и скорости, а также сигналы обратной связи и и Ug, преобразованные из трехфазной систег ал токов статора с помощью блока обратного преобразования координат 4.
Выходные сигналы блока 5 регуляторов поступают на блок 3 прямого преобразования координат, где преобразуется в сигналы управления для регулируемого источника 7 питания,подключенного к обмоткам статора машины переменного тока,
В качестве источника 7 может использоваться, например, источник регулируемого напряжения с обратной связью по току.
бходы для гармонических функций блоков 3 и. 4 подключены к датчику 2 не непосредственно,а через Формирователь 11 гармонических функций, связанный с формирователем ЭДС ста.тора 12,
Питание обмоток датчика 2, в качестве которого используется например, синусно-косинусный вращаюидайся тpaнcфop тop (СКВТ), осуществляются от задатчика 10 тока намагничивания машины,
Формирователь 11 гармонических функций, представленный на фиг, 2, содержит сумматоры 16-18, апериодические звенья 19, 20, элементы 21, 22 деления, определитель 23 амплитуды, 5 блок 24 формирования выпрямителей.
На выходе формирователя ЭДС статора 12 по информации, получаемой с датчиков 8 и 9, формируются составляющие ЭДС Pj и f. Названные составляющие ЭДС могут быть получены непосредственным образом, с помощью специальных обмоток, располагаемых в рабочих пазах машины.
Составляющие if и Lj., а также выходные сигналы блока 24 через сумматор 16 поступают на входы соответствующих апериодических звеньев 19 и 20,
Принцип работы электропривода заключается в следующем. Регулирование вектора полного тока статора производится в эле.ктроприводе по его составляющим в синхронно вращающейся системе координат. Одна из осей этой системы координат а ориентирована
5 по направлению вектора потока в машине, а другая в в опережающем ее на 90° направлении. Составляющая полного тока по оси а определяется сигналом задания Од , а по оси в сигналом Ug,
Текущее угловое положение вращающейся системы координат а, в относительно неподвижного статора (угол) может быть определено, например, по составляющим тока намагничивания машины в осях ;f и g, статора.
Если обозначить составляющие тока намагничивания через и 1, , то, используя известное правило, определяют Зт Л , Ci)5c/v по следующим отношениям, реализуемым в формирователе 11 гармонических функций:
SlUdv 7
tvf Mj
(i)
С0. -t- -Ц
Для реализации выражения 1) в формирователе 11 выполняются операции извлечения квадратного корня из суммы квадратов двух величин с помощью определителя 23 амплитуды (см. фиг.2), а также операции деления с помощью элементов 21, 22 деления.
Составляющие тока намагничивания i)w.f и Аук получаются в электроприводе путем интегрирования составляющих фазных ЭДС у: и f с помощью апериодических звеньев 19 и 20. С учетом того, что апериодические звенья вносят большие погрешности интегрирования, особенно на частотах, близких к нулю и того, что на нулевой частоте,токов статора f/и j: равны нулю, на входы .апериодических звеньев необходимо подавать также сигналы, пропорциональные составляющим тока намагничивани Эти сигналы могут быть получены с по мощью грубого, неточного датчика, к ким является, например, датчик 2 угл вого положения. При соответствующем выборе посто янной времени апериодических звеньев 19и 20 (она должна быть как можно больше) на рабочих частотах токов ст лгора составляющие тока намагничивания iyuf и tyuo формируются в основном по сигналам фазных ЭДС. i и Ig.. При этом сигналы с датчика 2 существенно ослабляются в апериодических звеньях а сигналы на выходах звеньев 19 и 20имеют хорошую синусоидальную форму и обеспечивают формирование требуемых гармонических функций и сигна лов на выходах блоков 3 и 4 прямого и обратного преобразований координат без погрешностей. При этом также обеспечивается высокая точность рабо ты электропривода в целом. При нулевой.частоте токов статора (в статоре протекают постоянные токи) гармонические функции и сигналы на выходах блоков 3 и 4 формируются по сигналам, поступающим с датчика 2 углового положения, однако в этом ре жиме они не содержат пульсаций, опре деляемых датчиком, Всоответствии с этим принципом в задатчике 10 формируется пара напряжений для запитки датчика 2 углового положения. Амплитуда этих напря жений соответствует задаваемому в машину току намагничивания. С выхода блока 24 (см. фиг. 2) после фазированного напряжения получают пару напряжений UL г и УЛУС, , соответствующих составляющим тока намагничивания в осях статора /ид., if, i/uf . II Kt где K, Kg - коэффициенты преобразования. Суммируют с помощью сумматора 16 выходные сигналы блока 24 с соответствующим составляющими ЭДС 8 f и f « , поступаю1да1ми с формирователя ЭДС 12 и подают полученные суммы на входы апериодических звеньев 19 и 20. с вы хода их снимают сигналы u;.Y ,и . , П i4 рТе где Т|, Tg - постоянные времени звеньев 19 и 20 соответ ственно; Kj - коэффициент передачи; р - оператор. Составляющие ЭДС могут быть ff i/uf ,/4) C K4PVs, где К - коэффициент, определяемый параметрами машины. Используя формулу 2 и выбирая постоянные времени в соответствии Тр lA liJi- , 2- К л Кэ - 3 из формулы 3 получают uA - It t-n. П- K / sОтсюда следует, что выходные сигналы апериодических звеньев, получен ых по формуле (5) и с учетом коэффициента преобразований могут быть использованы в качестве составляющих тока намагничивания, необходимых для формирования гармонических функций по формуле (1), Причем выражение (6) справедливо для всех режимов работы электропривода, включая режим заторможенной машины. Постоянные времени Т. и Tg апериодических звеньев выбирают болыиими (например, 10-20 сек) с тем, чтобы на рабочих частотах (например, от 0,1 Гц и выше) получение сигналов по формуле (6) производилось в основном за счет использования информации о составляющих ЭДС f. и Р с. При этом на частотах более 0,1 Гц коэффициент передачи по сигналам Utif и мал и роль датчика углового положения 2 сводится к формированию лишь начальных (пусковых) значений гармонических функций, а также поддержанию работоспособности Электропривода при длительных стоянках машины. Использование апериодических звеньев с большими постоянными времени для ф.ормирования. гармонических функций не вносит запаздываний в контуряы регулирования электроприводом, так как выполняется условие по формуле (5). При этом одновременно обеспечивается хорошая фильтрация составляющих ЭДС j. и ч..по высокочастотным помехам и хорошее качество формируеNbix гармонических функций. Таким образом, введение в электропривод в соответствии с изобретением задатчика тока намагничивания и формирователя гармонических функций позволяет производить формирование гармонических функций в рабочих режимах (практически с- частот вращения 0,1 Гц и выше) с высокой точностью за счет использования составляющих ЭДС стато- ра, а не сигналов с датчика углового положения. В соответствии с изобретением в электроприводе могут использоваться машины переменного тока различных
типов. При сохранении общей структуры (см фиг. 1) использование той или иной машины связано лишь с выполнением задатчика тока намагничивания и схемой подсоединения его выходов,
В случае использования в электроприводе синхронной машины задатчик 10.тока намагничивания подсоединен к блоку 6 заданий составляющих тока . статора и содержит в своем составе блок 25 модулятора, элементы 26 и 27 деления, элемент 28 суммирования и функциональный элемент 29 (см. фиг,3 Структура задатчика составлена, исходя иэ предположения, что.угол между осью синхронно вращающейся системы координат и продольной осью ротора о мал во всех режимах работы и можно считать его равным нулю. Частота выходных сигналов датчика 2 сортветствует частоте вращения ротора,
При использовании в электроприводе асинхронного коротко-замкнутого двигателя цепи, связанные с ротором машины (см , фиг. I) , отсутствуют. Задатчик 10 тока намагничивания, кроме блока б задания составляющих тока статора, связан также с формирователем гармонических функций (показано пунктиром на фиг. 1) и содержит в своем составе блок 25 модуляторов, формирователь 30 частоты токов ротора, элементы 31 32 умножения и масштабный преобразователь 33 (см.фиг.3,б), Частота выходных сигналов датчика 2 соответствует частоте поля статора и формируется как сумма частоты вращения ротора и выходной частоты формирователя 30,
При использовании в электроприводе асинхронного двигателя с фазна м ротором цепи статора (ротора) подключены. к питающей сети через источник 7 регулируемого напряжения, а цепь ротора (статора) - непосредственно. Задатчик 10 тока намагничивания подсоединен к датчикам 14 и 15 фазных токов и напряжений ротора (статора) (показано штрих-пунктиром на фиг,1) и содержит в своем составе блок 25 модуляторов и формирователь 34 ЭДС ротора (см. фиг. 3,в). Структура задатчика составлена, исходя из предположения, что ось а синхронно вращающейся системы координат направлена по вектору полного потока машины. Частота выходных сигналов датчика 2 соответствует разности частот питающей сети и вращения ротора. Режим синхронного Вращения ротора соответствует здесь режиму заторможенного ротора в электроприводах с синхронной и асинхронной коротко-замкнутой машины.
Таким образом, введение в соответствии с изобретением в электроприводы с различными машинами переменного тока новых блоков, а именно задатчика тока намагничивания и формирователя гармонических функций, позволяет обеспечить формирование гармонических функций в основном за счет информации об ЭДС статора. Роль электромеханического датчика углового положения сводится к вспомогательным функциям по образованию начальных (пусковых) значений этих функций и поддержанию работоспособности электропривода при длительных стоянках (в случае использования асинхронной машины с фазным ротором - в режиме синхронного вращения ротора).
При этом повышается точность формирования гармонических функций, выходных сигналов блоков прямого и обратного преобразования координат и всего привода в целом.
Формула изобретения
1.Электропривод с машиной переменного тока, содержащий блок задания составляющих тока статора, блоки прямого и обратного преобразований кординат , формирователь ЭДС и датчик углового положения, отличающийся тем, что, с целью повышения точности работы во всем диапазоне регулирования скорости, в него введены задатчик тока намагничивания машины и формирователь гармонических функций, одни из входов которого подсоединены к упс 1янутому формирователю ЭДС, другие входы через упомянуты датчик углового положения - к задатчику тока намагничивания машины, а выходы - к блокам прямого и обратного преобразований координат.
2.Электропривод по п, 1, о т л ичающийс я тем, что в качестве машины применена синхронная машина,
а задатчик тока намагничивания соединен также с упомянутым блоком задания составляющих тока статора,
3.Электропривод по п. 1, о т л ичающийс я тем, что в качестве машины применена асинхронная короткозамкнутая машина, а задатчик тока намагничивания соединен с упомянутым блоком задания составляющих тока статора и формирователем гармонических функций,
4.Электропривод по п, 1, отличающийся тем, что в качестве машины применена асинхронная машина
с фазным роторсй, а задатчик тока намагничивания соединен с датчиками фазных токов и напряжений ротора.
Г
| название | год | авторы | номер документа |
|---|---|---|---|
| Асинхронный электропривод с частотно-токовым управлением | 1984 |
|
SU1239824A1 |
| Электропривод переменного тока | 1979 |
|
SU849404A1 |
| Электропривод с асинхронной короткозамкнутой электрической машиной | 1978 |
|
SU765965A1 |
| Электропривод переменного тока с частотно-токовым управлением | 1985 |
|
SU1310990A1 |
| Электропривод переменного тока с частотно-токовым управлением | 1985 |
|
SU1310989A1 |
| Электропривод | 1981 |
|
SU1083319A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1979 |
|
SU1108597A2 |
| Электропривод | 1978 |
|
SU797043A1 |
| Электропривод переменного тока (его варианты) | 1984 |
|
SU1249686A1 |
| Электропривод переменного тока | 1975 |
|
SU661705A1 |