113
. Изобретение относится к электротехнике, а именно к частотно-управляемым электроприводам, построенным на основе асинхронных машин с коротк замкнутым ротором, и может быть использовано в системах, требующих вы- сокой точности регулирования скорости (положения) нагрузки и минимум потерь, например, в приводах подач и главного движения металлорежупщх станков,
Целью изобретения является уменьшение электрических потерь.
Ка фиг.1 представлена функциональная схема электропривода переменного тока с частотно-токовым управлением; на фиг,2 - функциональная схема формирователя фазных потокосцеплений с априодическими звеньями; на фиг.З - функциональная схема блока задания, начальных данных; на фиг,4 - схема выполнения управляемой модели цепи намагничивания асинхронного двигателя.
Электропривод переменного тока с частотно-токовым управлением содержи асинхронный двигатель 1 с коротко- замкнутым ротором (фиг.1), подключенный через датчик 2 тока и датчик 3 напряжения к выходам управляемого источника 4 тока, формирователь 5 фазных потокосцеплений, блок 6 задания момента,- блок 7 преобразования координат, векторный анализатор 8 с управляющим входом, амплитудным выходо 9 и опорным выходом 10, подключенным к опорному входу блока 7 преобразования координат, выход которого под-, ключен к управляющему входу управляемого источника 4 тока, а управляющий вход векторного анализатора 8 подключен к выходу формирователя 5 фазных потокосцеплений.
В электропривод переменного тока с частотно-токовым управлением введены регулятор П потокосцепления с элементом 12 сравнения на входе, нелинейный преобразователь 13 с характеристикой цепи намагничивания асинхронного двигателя, блок 14 задания начального тока намагничивания, последовательно включенные между собой блок 15 деления, определитель 16 модуля, два двухвходовых элемента 17 и 18 выбора максимального напряжения, датчики 19 температуры статора и блок 20 задания начальных данных с четырьмя входами 21, 22, 23 и 24.
02
Формирователь 5 фазных потокосцеплений выполнен с дополнительным многофазным входом 25 для установки начальных данных, подключенным к выходу
блока 20 задания начальных данных.
Вход делимого блока 15 деления подключен к выходу блока 6 задания момента, вход делителя блока 15 деления объединен с первым входом элемента 12 сравнения и подключен к амплитудному выходу 9 векторного анализатора 8, выход блока 14 задания начального тока намагничивания подключен к другому входу первого элемента 17
выбора максимального напряжения, выход которого через нелинейный преобразователь 13 с характеристикой цепи намагничивания асинхронного двигателя подключен к второму входу элемента 12 сравнения, а выход блока 15 деления и выход второго элемента 18 выбора максимального напряжения подключен к соответствующим управляющим входам блока 7 преобразования координат.
Формирователь 5 фазных потокосцеплений содержит в каждой фазе последовательно соединенные датчики 26 фазной ЭДС (фиг.2) и апериодическое
звено 27, выполняющее роль интегратора .
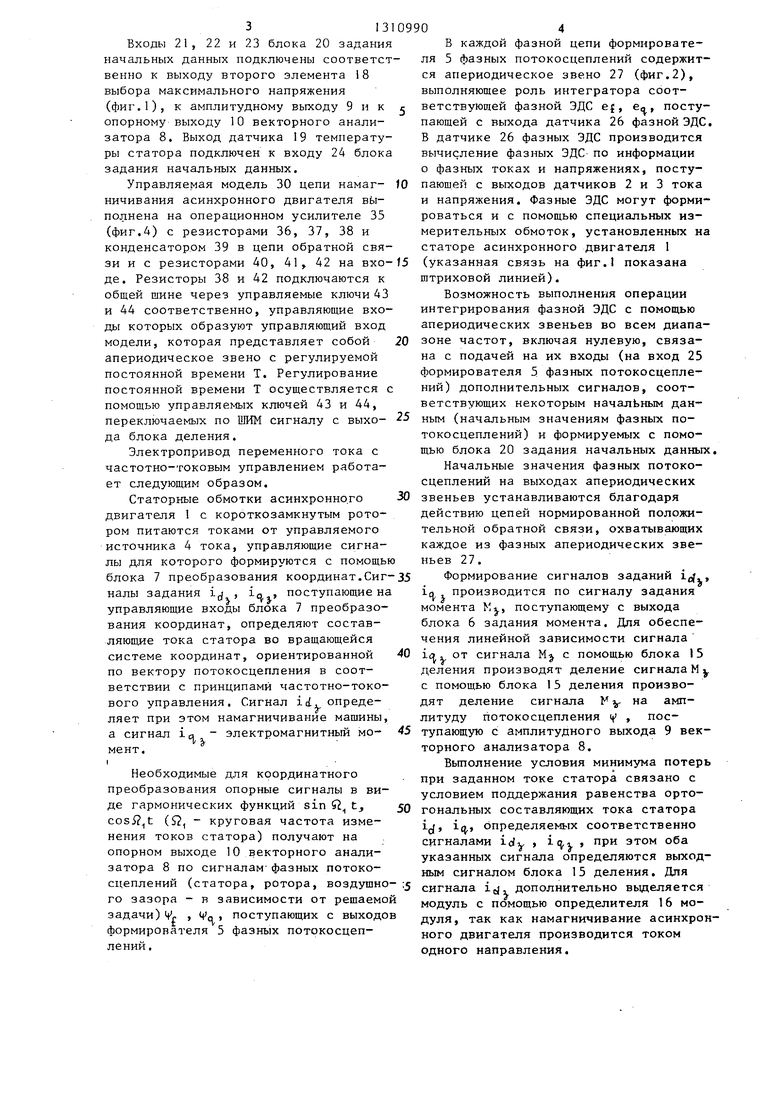
Блок 20 задания начальных данных выполнен с двумя блоками 2S и 29 деления (фиг.З) и с последовательно
соединенными управляемой моделью 30 цепи намагничивания асинхронного двигателя с основными и управляющими входами, нелинейным преобразователем 31 с характеристикой цепи намагничивания асинхронного двигателя, регулятором 32 потокосцепления, элементом 33 сравнения и блоком 34 преобразования координат, выход которого образует выход блока 20 задания начальных
данных.
Первый вход регулятора 32 потокосцепления объединен с другим входом элемента 33 сравнения, с входом делимого блока 28 деления и подключен к
выходу нелинейного преобразователя 31 с характеристикой цепи намагничивания асинхронного двигателя, выход управляемой модели 30, второй вход регулятора 32 потокосцепления, опорньй вход
блока 34 преобразования координат и вход делителя блока 29 деления образуют соответственно входы 21, 22, 23 и 24 блока 20 .задания начальных данных .
313
Входы 21, 22 и 23 блока 20 задания начальных данных подключены соответственно к выходу второго элемента 18 выбора максимального напряжения (фиг.1), к амплитудному выходу 9 и к опорному выходу 10 векторного анализатора 8, Выход датчика 19 температуры статора подключен к входу 24 блока задания начальных данных.
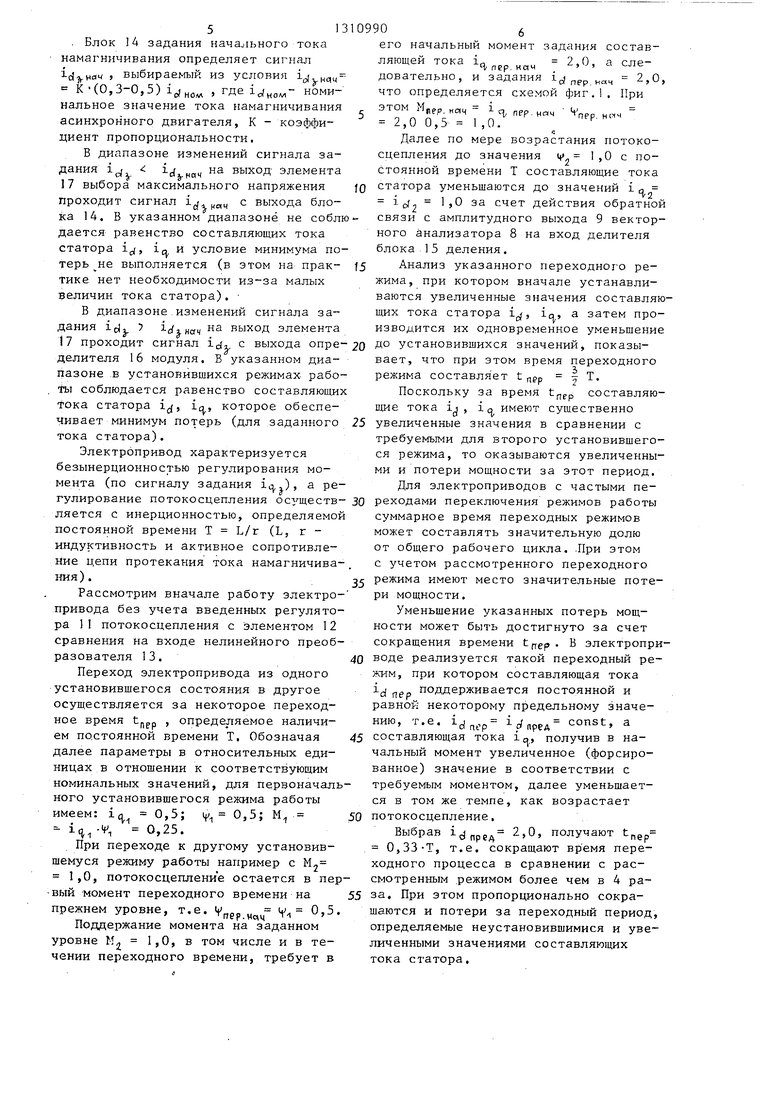
Управляемая модель 30 цепи намагничивания асинхронного двигателя выполнена на операционном усилителе 35 (фиг.4) с резисторами 36, 37, 38 и
пающей с выхода датчика 26 фазной ЭДС. В датчике 26 фазных ЭДС производится вычисление фазных ЭДС по информации о фазных токах и напряжениях, поступающей с выходов датчиков 2 и 3 тока и напряжения. Фазные ЭДС могут формироваться и с помощью специальных измерительных обмоток, установленных на статоре асинхронного двигателя 1
конденсатором 39 в цепи обратной связи и с резисторами 40, 41, 42 на вхо-t5 (указанная связь на фиг.1 показана де. Резисторы 38 и 42 подключаются к штриховой линией), общей шине через управляемые ключи 43 и 44 соответственно, управляющие входы которых образуют управляющий вход модели, которая представляет собой 20 апериодическое звено с регулируемой постоянной времени Т. Регулирование постоянной времени Т осуществляется с помощью управляемых ключей 43 и 44,
Возможность выполнения операции интегрирования фазной ЭДС с помощью апериодических звеньев во всем диапазоне частот, включая нулевую, связана с подачей на их входы (на вход 25 формирователя 5 фазных потокосцеплений) дополнительных сигналов, соответствующих некоторым начальным данпереключаемых по ШИМ сигналу с выхо- 25 ным (начальным значениям фазных потокосцеплений) и формируемых с помощью блока 20 задания начальных данных.
Начальные значения фазных потокосцеплений на выходах апериодических 30 звеньев устанавливаются благодаря действию цепей нормированной положительной обратной связи, охватывающих каждое из фазных апериодических звеньев 27.
Формирование сигналов заданий iof,,
налы задания , ic, поступающие на
управляющие входы блока 7 преобразода блока деления.
Электропривод переменного тока с частотно-токовым управлением работает следующим образом.
Статорные обмотки асинхронно.го двигателя 1 с короткозамкнутым ротором питаются токами от управляемого источника 4 тока, управляющие сигналы для которого формируются с помощью
40
блока 7 преобразования координат.Сиг-35
In производится по сигналу задания момента К, поступающему с выхода блока 6 задания момента. Для обеспечения линейной зависимости сигнала i, от сигнала Mj с помощью блока 15 деления производят деление сигнала М j. с помощью блока 15 деления производят деление сигнала N у на амплитуду потокосцепления , поса сигнал ia электромагнитный мо- 45 тупающую с амплитудного выхода 9 векторного анализатора 8.
Выполнение условия минимума потерь при заданном токе статора связано с условием поддержания равенства орто- 50 гональных составляющих тока статора ij, iq,, определяемых соответственно
вания координат, определяют составляющие тока статора во вращающейся системе координат, ориентированной по вектору потокосцепления в соответствии с принципами частотно-токового управления. Сигнал ic{ определяет при этом намагничивание мащины.
мент. )
Необходимые для координатного преобразования опорные сигналы в виде гармонических функций sin (S7, - круговая частота изменения токов статора) получают на опорном выходе 10 векторного анализатора 8 по сигналам- фазных потокосигналами id
V l-v
при этом оба
указанных сигнала определяются вьпсод- ным сигналом блока 15 деления. Для
сцеплений (статора, ротора, воздушно-15 сигнала icj, дополнительно вьщеляется
го зазора - в зависимости от решаемой - модуль с помощью определителя 16 модуля, так как намагничивание асинхронного двигателя производится током одного направления.
задачи) Vr поступающих с выходов формирователя 5 фазных потокосцеплений ,
В каждой фазной цепи формирователя 5 фазных потокосцеплений содержится апериодическое звено 27 (фиг.2), выполняющее роль интегратора соот- ветствующей фазной ЭДС е{, е,,, посту
пающей с выхода датчика 26 фазной ЭДС. В датчике 26 фазных ЭДС производится вычисление фазных ЭДС по информации о фазных токах и напряжениях, поступающей с выходов датчиков 2 и 3 тока и напряжения. Фазные ЭДС могут формироваться и с помощью специальных измерительных обмоток, установленных на статоре асинхронного двигателя 1
(указанная связь на фиг.1 показана штриховой линией),
40
сигналами id
V l-v
при этом
указанных сигнала определяются ным сигналом блока 15 деления.
- модуль с помощью определителя 16 модуля, так как намагничивание асинхронного двигателя производится током одного направления.
. Блок lA задания Ha4ajibHoro тока намагничивания определяет сигнал id.Hci 5 выбираемый из условия i, няч К (0,3-0,5) , где номинальное значение тока намагничивания асинхронного двигателя, К - коэффициент пропорцион-альности.
В диапазоне изменений сигнала задания ip, iff yц на выход элемента 17 выбора максимального напряжения fo Проходит сигнал i „ с выхода блока 14, В указанном диапазоне не соблюдается равенство составляющих тока статора i, i,, и условие минимума потерь не выполняется (в этом на прак- |5 тике нет необходимости из-за малых величин тока статора).
В диапазоне.изменений сигнала задания ipj, 7 idiHa4 И2- выход элемента
3109906
его начальный момент задания составляющей тока iq,,,gp „„„ 2,0, а следовательно, и задания icJnep.naH 2,0, что определяется схемой фиг.1. При
этом МГРО паи i о „on - Vn
ПРр.
rep. но(ч - с, пер. нам
2,0 0,5 1,0.
Далее по мере возрастания потоко- сцепления до значения ц 1,0 с постоянной времени Т составляющие тока статора уменьшаются до значений i а ipj, 1,0 за счет действия обратной связи с амплитудного выхода 9 векторного анализатора 8 на вход делителя блока 15 деления.
Анализ указанного переходного режима, при котором вначале устанавливаются увеличенные значения составляющих тока статора i, io, а затем производится их одновременное уменьшение
17 проходит сигнал i., с выхода опре-20 Д° установившихся значений, показы- делителя 16 модуля. В указанном диапазоне .в установившихся режимах рабовает, что при этом время переходного
режима составля ет t ер 2 ты соблюдается равенство составляющих Поскольку за время составляютока статора i, ia, которое обеспе-щие тока i , io имеют существенно
чивает минимум потерь (для заданного 25увеличенные значения в сравнении с
тока статора).требуемыми для второго установившегоЭлектропривод характеризуетсяся режима, то оказываются увеличенныбезынерционностью регулирования мо-ми и потери мощности за этот период, мента (по сигналу задания iq.) а ре- Для электроприводов с частыми пегулирование потокосцепления осуществ- 30реходами переключения режимов работы
ляется с инерционностью, определяемойсуммарное время переходных режимов постоянной времени Т L/r (L, г - индуктивность и активное сопротивление цепи протекания тока намагничива-.
ния).jrрежима имеют место значительные потеРассмотрим вначале работу злектро- ри мощности, привода без учета введенных регулятора 1I потокосцепления с элементом 12
может составлять значительную долю от общего рабочего цикла. .При этом с учетом рассмотренного переходного
Уменьшение указанных потерь мощности может быть достигнуто за счет
сравн.ения на входе нелинейного преобразователя 13.
Переход электропривода из одного установившегося состояния в другое осуществляется за некоторое переходное время , определяемое наличием постоянной времени Т, Обозначая далее параметры в относительных единицах в отношении к соответствующим номинальных значений, для первоначального установившегося режима работы имеем: i с 0,5; ( 0,5; М - i,-V, 0,25.
При переходе к другому установившемуся режиму работы например с М2 1,0, потокосцеплени е остается в пер -вый момент переходного времени на прежнем уровне, т.е. Уг,ер.„ у., 0,5
Поддержание момента на заданном уровне Mj 1,0, в том числе и в течении переходного времени, требует в
этом МГРО паи i о „on - Vn
ПРр.
rep. но(ч - с, пер. нам
2,0 0,5 1,0.
Далее по мере возрастания потоко- сцепления до значения ц 1,0 с постоянной времени Т составляющие тока статора уменьшаются до значений i а ipj, 1,0 за счет действия обратной связи с амплитудного выхода 9 векторного анализатора 8 на вход делителя блока 15 деления.
Анализ указанного переходного режима, при котором вначале устанавливаются увеличенные значения составляющих тока статора i, io, а затем производится их одновременное уменьшение
Д° установившихся значений, показы-
вает, что при этом время переходного
режима составля ет t ер 2 Поскольку за время составляюсуммарное время переходных режимов
может составлять значительную долю от общего рабочего цикла. .При этом с учетом рассмотренного переходного
ри мощности,
Уменьшение указанных потерь мощности может быть достигнуто за счет
сокращения времени е электроприводе реализуется такой переходный режим, при котором составляющая тока i поддерживс1ется постоянной и равной некоторому предельному значению, т.е. i,,p 1 У„реА const, а
составляющая тока ia, получив в начальный момент увеличенное (форсированное) значение в соответствии с требуемым моментом, далее уменьшается в том же темпе, как возрастает
потокосцепление,
Выбрав icJnpeA 2 ° обучают t 0,33-Т, т.е. сокращают время переходного процесса в сравнении с рассмотренным .режимом более чем в 4 раза. При этом пропорционально сокрааются и потери за переходный период, определяемые неустановившимися и увеиченными значениями составляющих тока статора.
Реализация переходного режима с уменьшенным t осуществляется с но- мошью элементов 1, 12 и 13. Результат сравнения на входах элемента 12 сравнения заданного потокосцепления W , поступающего с выхода нелинейного преобразователя 13, и измеренного V 5 поступающего с выхода 9 векторного анализатора 8, воздействует на регулятор 11 потокосцепления. На выходе его при t з V устанавливается сигнал icJ, npff, соответствующий предельному значению составляющей тока о пред выходе элемента 18 на время переходного режима устанавливает- ся сигнал ij/inpe О окончании - сигнал icfi поступающий с выхода элемента 17. В блоке 20 задания начальных данных производится сравнение сигнала заданного потокосцепления ly., поступающего на вход 21, и измеренного (V , поступающего на вход 22. Результаты сравнения воздействуют через регулятор 32 потокосцепления (фиг.З) и элемент 33 сравнения на управляющий вход блока 34 преобразования координат. Кроме того, на указанный управляющий вход через элемент 33 сравнения воздействует непосредственно сигнал Vi При этом в
а
начальный момент времени сигнал у определяет амплитуду начальных фазных потокосцеплений ( , Vc: , формируемых на выходе апериодических звеньев 27 (фиг.2), а фазы являются произвольными, но соответствующими двухфазной системе сигналов. Полученные по цепям положительной обратной связи (охватывающим апериодические звенья 27) произвольные значения фазных потокосцеплений определяют лроизволь- ные начальные значения сигналов на опорном выходе 10 векторного анализатора 8 и произвольное начальное направление формируемого потокосцепле- ния в асинхронном двигателе 1. Посколку асинхронный двигатель 1 с коротко- замкнутым ротором имеет симметричные по фазам магнитные цепи, то любое начальное положение вектора потокосцепления может быть принято за исходное Е дальнейшем при поступлении сигнала Ml, с выхода блока 6 задания момента возникает момент, приводящий к вращению вала асинхронного двигателя и к возникновению фазных ЭДС на выходе датчика фазных ЭДС в формирователе 5 фазных потокосцеплений. Теперь фазны
потокосцепления i. , у на выходах формирователя 5 в основном определяются результатом интегрирования фазных ЭДС. При этом роль дополнительных сигналов на входе 25 (фиг.2) сводится к компенсированию активных составляющих выходных токов фазных апериодических звеньев 27.
Повыщение точности работы электропривода определяется тем, что сигнал заданного потокосцепления t/, формируется по сигналу задания iof, тока намагничивания, пропущенному через управляемую модель 30 (фиг.З) цепи намагничивания асинхронного двигателя и нелинейный преобразователь 31, учитывающий насыщение магнитной цепи Дополнительное повышение точности формирования 1. связано с коррекцией параметров управляемой модели 30, соответствующих параметрам L и г асинхронного двигателя 1. Сигнал, соответствующий текущему значению L, формируется на выходе блока 28 деления. Сигнал, соответствующий текущему значению г, формируется на выходе датчика 19 температуры статора (фиг.1) и поступает на вход 24 блока 20 задания начальных данных. С помощью блока 29 деления получают частное L/r, в соответствии с которым производят коррекцию параметров управляемой модели 30.
Таким образом, введение в электропривод переменного тока с частотно- токовым управлением блока деления, определителя модуля, двух элементов выбора максимального напряжения, блока задания начального тока намагничивания, а также регулятора потокосцепления с элементом сравнения на входе, нелинейного преобразователя с характеристикой цепи намагничивания двигателя, датчик температуры статора и блока задания начальных данных обеспечивает поддержание в установившихся режимах работы оптимального с точки зрения потерь соотношения (равенства) составляющих тока статора, определяющих потокосцепление и момент, а также - сокращение времени переходных режимов за счет поддержания в течение этого времени постоянного, увеличенного в сравнении с установившимся, значения тока намагничивания, благодаря чему снижаются электрические потери в электроприводе в сравнении с известным решением.
913
Формула изо.бретения
Электропривод переменного тока с частотно-токовым управлением, содержащий а синхронный двигатель с корот- козамкнутым ротором, подключенный через датчики тока,и напряжения к выходам управляемого источника тока, формирователь фазных потокосцеплений с фазными апериодическими звеньямиs подключенный входами к вь ходам датчиков тока и напряжения, блок задания момента, блок преобразования координат, векторный анализатор с управляющим входом, амплитудным выходом и опорным выходом, подключенным к опорному входу блока преобразования координат, выход которого подключен к управляющему входу управляемого источника тока, а управляющий вход векторного анализатора подключен к выходу формирования фазных потокосцеплений, отличающий, ся тем, что, с целью уменьшения электрических потерь, введены .регулятор пото- косцепления с элементом сравнения на входе, нелинейный преобразователь с характеристикой цепи намагничивания асинхронного двигателя, блок задания начального тока намагничивания} последовательно включенные между собой блок деления, определитель модуля и два двухвходовых элемента выбора максимального напряжения, датчик темпе- ратуры статора и блок задания начальных данных с четырьмя входами, выполненный с двумя блоками деления и с последовательно соединенными управляемой моделью цепи намагничивания асинхронного двигателя с основным и управляющим входами, нелинейным преобразователем с характеристикой цепи намагничивания асинхронного двигателя, регулятором пртокосцепленрш,, элементом сравнения и блоком преобразования координат, выход которого образует выход блока задания начальных данных, причем первьй вход регулятора потокосцепления в блоке задания начальнь х данных объединен с другим входом элемента сравнения, с входом делимого первого блока деления и под010
ключен к выходу нелинейного преобразователя с характеристикой цепи намагничивания асинхронного двигателя, выход управляемой модели цепи намагничивания асинхронного двигателя, подключен к входу дели:теля первого блока деления, соединенного выходом с входом делимого второго блока деления, выход которого подключен к
управляющему входу -управляемой модели цепи намагничивания асинхронного двигателя, основной вход которой, вход регулятора потокосцепления,опорный вход блока преобразования координат и
вход делителя второго блока деления образуют соответственно первый, второй, третий и четвертый входы блока задания начальных данных, а формирователь фазных потокосцеплений выполнен
с дополнительным многофазным входом для установки начальных данных, образованным дополнительными входами фазных апериодических звеньев и подключенным к выходу блока задания начальных данных, при этом первый, второй и третий входы блока задания начальных данных подключены соответственно к выходу второго элемента выбора максимального напряжения, к амплитудному
выходу и к опорному выходу векторно- го анализатора, а выход датчика тем - пературы статора подключен к четвер- TONry входу блока задания начальных данных, вход депимого блока деления
подключен к выходу блока задания момента, вход делителя блока деления объединен с первьм входом элемента сравнения и подключен к амплитудному выходу векторного анализатора, выход
блока задания начального тока намагничивания подключен к другому входу первого элемента выбора максимального напряжения, выход которого через нелинейный преобразователь.с характеристикой цепи намагничивания асинхронного двигателя подключен к второму входу элемента сравнения, а выход блока деления и выход второго элемента выбора максимального напряжения
подключены к соответствующим управляющим входам блока преобразования координат.
1310990
Редактор М.Бандура
Заказ 1900/54
Тираж 661Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
фиг. 2
:з
1 I ЁЬН
Составитель А.Головченко
Техред И.Попович Корректор Г.Решетник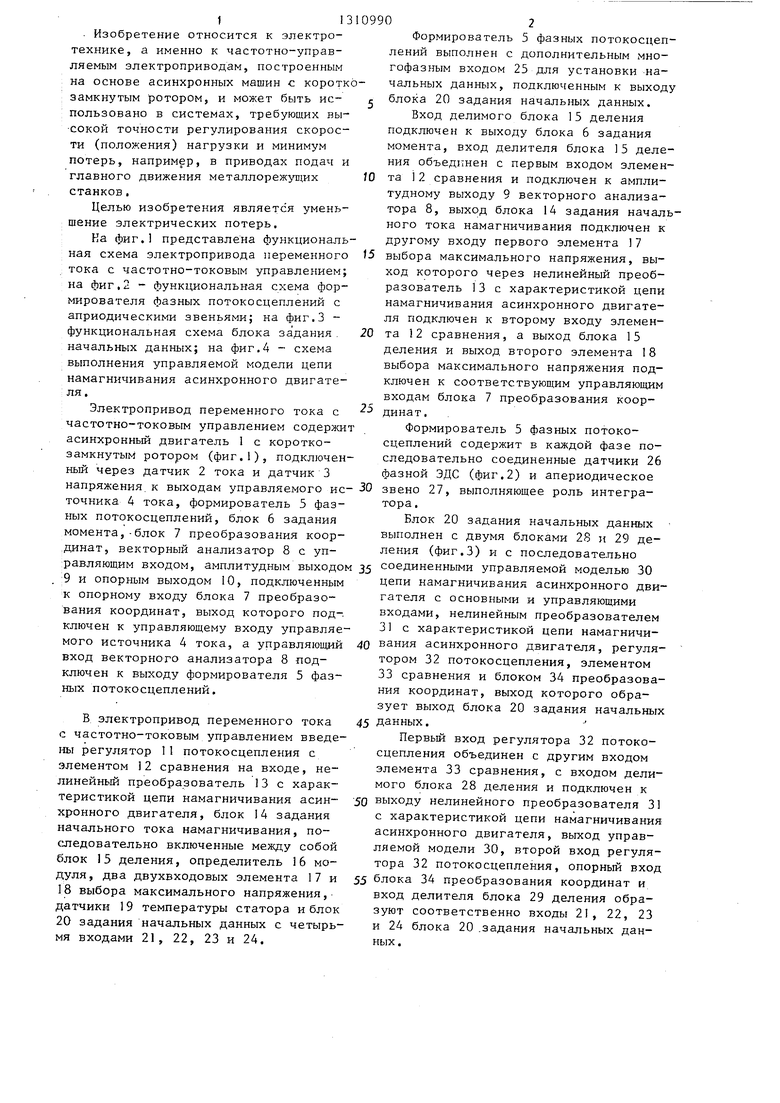

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока с частотно-токовым управлением | 1985 |
|
SU1310989A1 |
| Асинхронный электропривод с частотно-токовым управлением | 1984 |
|
SU1239824A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Устройство для определения электромагнитного момента асинхронного двигателя | 1990 |
|
SU1770785A1 |
| Электропривод с машиной переменного тока | 1976 |
|
SU675568A1 |
| Электропривод переменного тока | 1984 |
|
SU1515322A1 |
| Электропривод с векторным управлением | 1987 |
|
SU1443112A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| Асинхронный частотно-управляемый электропривод | 1981 |
|
SU1020950A1 |
Изобретение относится к электротехнике и может быть использовано в приводах подач и главного движения металлорежущих станков. Целью изобретения является уменьшение электрических потерь. Указанная цель достигается введением в. электропривод переменного тока с частотно-токовым управлением блока 15 деления, определителя 16 модуля, двух .элементов 17, 18 выбора максимального напряжения, регулятора 11 потокосцепления, нелинейного преобразователя 13 с характеристикой цепи намагничивания, датчика 19 температур статора и блока 20 задания начальных данных. Введение указанных блоков и элементов позволяет поддерживать в установившихся режимах работы оптимальное с точки зрения потерь соотношение составляющих тока статора, определяющих пото- косцепление и момент. Кроме того, сокращается время переходных режимов за счет поддержания в течение этого времени постоянного, увеличенного в сравнении с установившимся значением тока намагничивания. 4 ил. i (Л со со со
| Электропривод с асинхронным короткозамкнутым двигателем | 1976 |
|
SU615584A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Способ частотно-токового управления асинхронной машиной | 1973 |
|
SU493882A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
