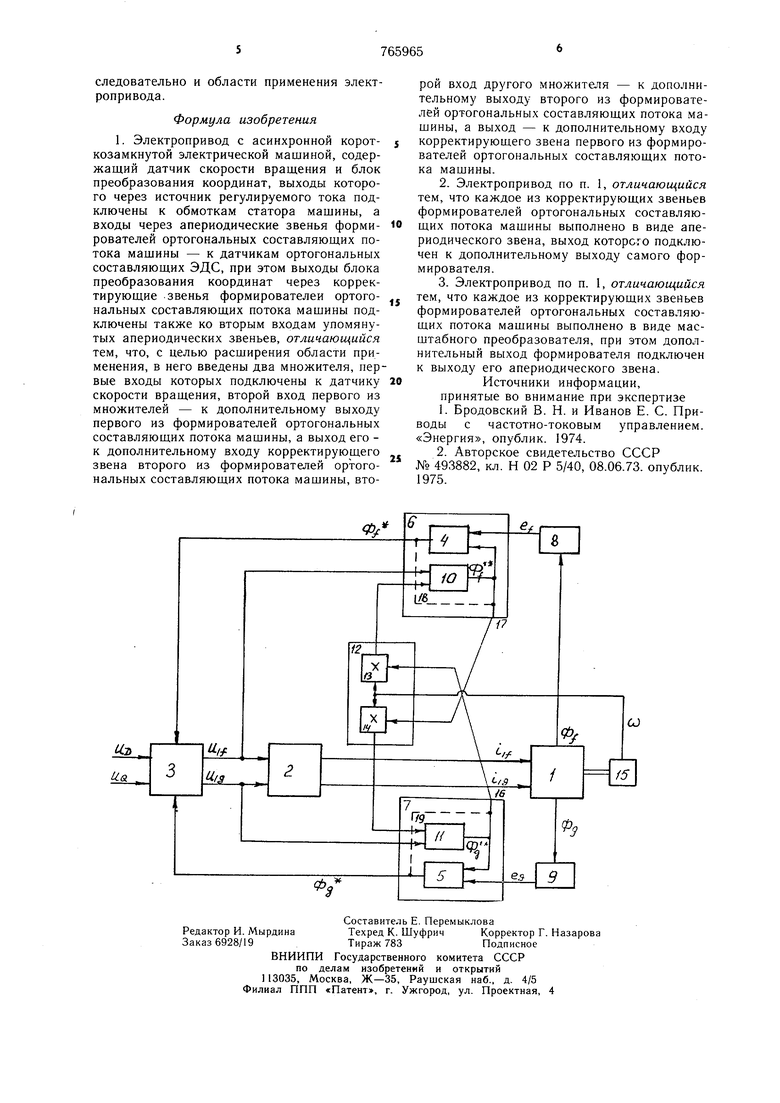
Изобретение относится к электротехнике, а именно к частотно-управляемому электроприводу переменного тока, и предназначено для использования в системах, где тре.буется высокое качество регулирования. Известен электропривод, содержащий блок преобразования координат, выходы которого через источник регулируемого тока подключены к обмоткам статора машины 1. Указанный электропривод конструктивно сложен из-за необходимости установки элект ромеханических датчиков углового положения ротора машины. Наиболее близким к изобретению по технической сущности является электропривод с асинхронной короткозамкнутой мащиной, содержащий датчик скорости вращения, блок преобразования координат, выходы которого через источник регулируемого тока подключены к статору мащины, а входы через апериодические звенья формирователей ортогональных составляющих потока мащины - к датчикам ортогональных составляющих ЭДС, при этом выходы блока преобразования координат через корректирующие звенья формирователей составляющих потока подключены также ко вторым входам упомянутых апериодических звеньев. Недостатком известного электропривода являются ограничения по регулированию в зоне низких скоростей при отсутствии сигналов на выходах датчиков составляющих ЭДС мащины. Цель изобретения - расщирение области применения электропривода с асинхронной короткозамкнутой машиной. Указанная цель достигается тем, что в электропривод с асинхронной короткозамкнутой электрической мащиной, содержащий датчик скорости вращения и блок преобразования координат, выходы которого через источник регулируемого тока подключены к обмоткам статора машины, а входы через апериодические звенья формирователей орХ гональных составляющих потока машины - к датчикам ортогональных составляющих ЭДС, при этом выходы блока преобразования координат через корректирующие звенья формирователей ортогональных составляющих потока мащины подключены также ко вторым входам упомянутых апериодических звеньев, в него введен преобразователь, составленный из двух множителей. первые входы которых подключены к датчику скорости вращения, второй вход первого из множителей - к дополнительному выходу первого из формирователей ортогональных составляющих потока машины, а выход его - к дополнительному входу корректирующего звена второго из формирователей ортогональных составляющих потока мащины, второй вход другого множителя - к дополнительному выходу второго из формирователей ортогональных составляющих потока машины, а выход - к дополнительному входу корректирующего звена первого из формирователей ортогональных составляющих потока мащины. Кроме того, каждое из корректирующих звеньев формирователей ортогональных составляющих потока машины выполнено в виде апериодического звена, выход которого подключен к дополнительному выходу самого формирователя. Каждое из корректирующих звеньев формирователей ортогональных составляющих потока машины выполнено в виде масштабного преобразователя, при этом дополнительный выход формирователя подключен к выходу его апериодического звена. На чертеже изображена блок-схема электропривода с асинхронной короткозамкнутой электрической машиной. Короткозамкнутая асинхронная машина 1подключена к регулируемому источнику 2тока, управляющие входы которого соединены с выходами блока 3 преобразования координат. Входы блока 3 через апериодические звенья 4, 5 формирователей 6, 7 ортогональных составляющих потока машины подключены к датчикам 8, 9 ортогональных составляющих ЭДС, связанным с машиной 1. Выходы блока 3 через корректирующие звенья 10, 11 формирователей 6, 7 подключены также ко вторым входам апериодических звеньев 4, 5. Электропривод содержит функциональный преобразователь 12, составленный из множителей 13, 14. Первые входы указанных множителей подключены к датчику скорости вращения 15, вторые входы перекрестным образом подключены к выходам 16, 17 формирователей 6, 7. Выходы множителей 13, .14 подключены ко вторым входам 18, 19 корректирующих звеньев 10, И соответственно. В электроприводе осуществляется регулирование тока мащины по двум его ортогональным составляющим (току намагничивания и активному току ротора), для чего на вход электропривода поступают два независимых сигнала постоянного тока Uj, и Uq соответственно. В блоке 3 преобразования координат осуществляются известные преобразования постоянных сигналов Uj) и UQ в переменные управляющие сигналы Ц, U,o. По сигналам ,f,U(aB регулируемом источнике 2 тока форируются фазные токи iif,iijмашины. Необходимые для выполнения координатных преобразований гармонические функции inci(t и cos О) it ((О I - частота токов статора) образуются в электроприводе по сигнаам Ф и ф|на выходах формирователей 6, 7, оторые соответствуют ортогональным сотавляющим потока в машине Ф и Фа. Формирование сигналов Ф Ф производится по составляющим ЭДС, измеренным с помощью датчиков 8 и 9 соответственно и проинтегрированных с помощью апериодических звеньев 4, 5. На входы апериодических звеньев кроме составляющих ЭДС е, е (являющихся производными от составляющих потока Ф, фд) подают дополнительные сигналы Щ, Щ соответствующие самим составляющим потока. При определенном масштабе указанных слагаемых на входах апериодических звеньев на выходах их получают сигналы , фК, соответствующие составляющим потока С, Фо во всех режимах работы электропривода. Введенный в электропривод функциональный преобразователь 12 позволяет учесть фактическое значение скорости вращения со при формировании дополнительных сигналов Щ Ф. Тем самым устраняется несоответствие фактически установившегося в машине потока (тока намагничивания) с сигналом задания IJL, которое может возникнуть при очень медленных изменениях скорости, когда сигналы на выходах датчиков 8, 9 равны нулю (датчики 8, 9 реагируют на скорость изменения потока машины 1). При этом в электроприводе отсутствуют ограничения по регулированию низких скоростей вращения. Роль дополнительных сигналов ф фа проявляется в режиме пуска, режиме медленных вращений, т. е. при отсутствии сигналов на выходах датчиков 8, 9. В рабочих же режимах получение сигналов на выходах формирователей 6, 7 обеспечивается в основном за счет составляющих ЭДС ег, . Корректирующие звенья 10, 11 могут быть выполнены различным образом. При выполнении корректирующих звеньев 10, 11 в виде апериодических звеньев (с постоянной времени, равной постоянной времени цепи ротора) их выходы должны быть подключены к дополнительным выхода,м 16, 17 формирователей 6, 7. При выполнении корректирующих звеньев 10, 11 в виде масштабных преобразователей к дополнительным выходам 16, 17 формирователей 6, 7 должны быть подключены выходы апериодических звеньев 4, 5 (эти связи показаны на чертеже штриховыми линиями). Таким образом введение в электропривод функционального преобразователя обеспечивает достижение поставленной цели - расширение зоны регулируемых скоростей, а
следовательно и области применения электропривода.
Формула изобретения
1. Электропривод с асинхронной короткозамкнутой электрической машиной, содержащий датчик скорости вращения и блок преобразования координат, выходы которого через источник регулируемого тока подключены к обмоткам статора мащины, а входы через апериодические звенья формирователей ортогональных составляющих потока мащины - к датчикам ортогональных составляющих ЭДС, при этом выходы блока преобразования координат через корректирующие звенья формирователей ортогональных составляющих потока мащины подключены также ко вторым входам упомянутых апериодических звеньев, отличающийся тем, что, с целью расщирения области применения, в него введены два множителя, первые входы которых подключены к датчику скорости вращения, второй вход первого из множителей - к дополнительному выходу первого из формирователей ортогональных составляющих потока мащины, а выход его к дополнительному входу корректирующего звена второго из формирователей ортогональных составляющих потока машины, второй вход другого множителя - к дополнительному выходу второго из формирователей ортогональных составляющих потока мащины, а выход - к дополнительному входу корректирующего звена первого из формирователей ортогональных составляющих потока машины.
2.Электропривод по п. 1, отличающийся тем, что каждое из корректирующих звеньев формирователей ортогональных составляющих потока мащины выполнено в виде апериодического звена, выход которого подключен к дополнительному выходу самого формирователя.
3.Электропривод по п. 1, отличающийся тем, что каждое из корректирующих звеньев формирователей ортогональных составляющих потока машины выполнено в виде масштабного преобразователя, при этом дополнительный выход формирователя подключен к выходу его апериодического звена.
Источники информации, принятые во внимание при экспертизе
1.Бродовский В. Н. и Иванов Е. С. Приводы с частотно-токовым управлением. «Энергия, опублик. 1974.
2.Авторское свидетельство СССР
№ 493882, кл. Н 02 Р 5/40, 08.06.73. опублик. 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Асинхронный электропривод с частотно-токовым управлением | 1984 |
|
SU1239824A1 |
| Электропривод переменного тока | 1979 |
|
SU849404A1 |
| Электропривод переменного тока с частотно-токовым управлением | 1985 |
|
SU1310989A1 |
| Устройство для управления асинхронной машиной с короткозамкнутым ротором | 1980 |
|
SU928580A1 |
| Электропривод с машиной переменного тока | 1976 |
|
SU675568A1 |
| Электропривод | 1981 |
|
SU1083319A1 |
| Электропривод переменного тока | 1982 |
|
SU1508337A1 |
| Электропривод переменного тока с частотно-токовым управлением | 1985 |
|
SU1310990A1 |
| Электропривод с асинхронной машиной | 1971 |
|
SU548220A3 |
| Электропривод переменного тока (его варианты) | 1984 |
|
SU1249686A1 |
