Предлагается бомбардировочный прицел с визиром. Электрические контакты, включенные в цепь бомбосбрасывателя или сигнала, расположены в прицеле - один на горизонтальном стержне, связанном с визиром .прицела, а второй - на конце стержня, который во время пролета базы сцеплен с первым стержнем при помощи равноплечего рычага первого -рода и поэтому успевает забросить контакт навстречу первому контакту на велиичину, пропорциональную тангенсу угла прицеливания, т. е. на величину, пропорциональную скорости самолета. Во время же бом.бометания, т. е. .после установки угла прицеливания, стержень, связанный с визиром прицела, остается разобщенным с равноплечим рычагом, отчего второй контакт в течение этого времени остается неподвижным.
Координаты точки траектории полета авиабомбы могут быть определены следующими уравнениями:
dx - vdt, откуда х , vdt - vt,.(1)
где: V-скорость полета; t - время падения бомбы. Аналогично
;,где g - ускорение силы тяжести.
Предположим в А аЬс вершина угла а означает поражаемую цель, а вершина с - самолет. Угол прицеливания а - определяется:
,аЬ X т-,
iga - -. Подставляя вместо х и г/ их значения из уравнении сЬ у
{I и 2) находим:
5//2
g- ,(2)
te«-2.(3)
Заметим t в уравнении (3) его значением из уравнения (2), тогда
tga -.(4)
Обозначив постоянную величину в последней формуле через суммарный коэффициент К, получаем окончательно
Таким образом, прибор должен механически решать уравнение (5) при условии, что V фиксируется визиром в сочетании с хронометром, а у задается по шкале, согласно показаниям высотомера.
Если гипотенузу ас представить в виде визирной линейки, поворотной в вершине угла с и следяш,ей при полете за выбранной целью, то на горизонтальном катете ав будем иметь отложение длины, соответствующей скорости полета в единицу времени.
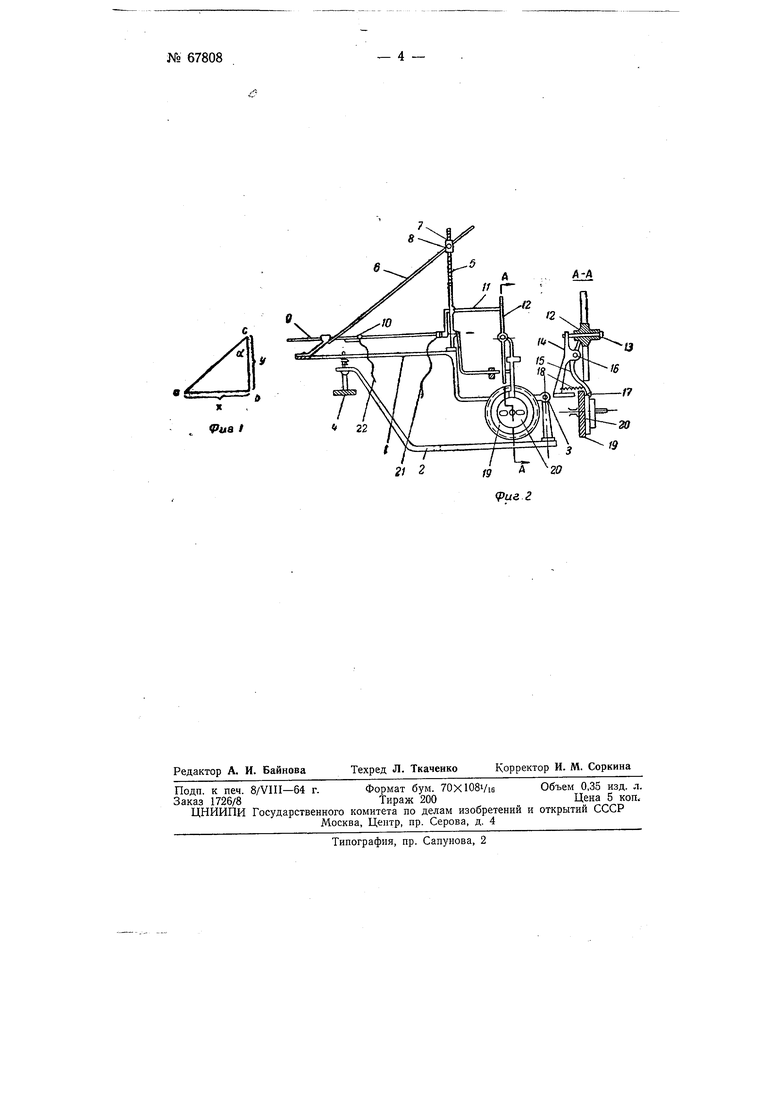
На фиг. 1 представлен график; на фиг. 2 - прибор, разрез по А-А.
Прибор монтируется на подставке 1, опирающейся на основание 2 с помощью шарнира 3 и юстировочного винта 4 с пружиной. Стойка -5 жестко закреплена в подставке 1 и имеет шкалу, пропорциональнуюу, уравнение (5). Визирная линейка или оптическая труба 6 посажена юарнирно на оси, закрепленной в ползунке 7, который может быть перемещен вдоль стойки 5. Стопорным винтом 8 ползунок 7 закрепляется на заданном отсчете по шкале. Стержень 9 несет палец 10, с помощью которого визирная линейка сообщает продольное перемещение п(10му стержню в направляющих отверстиях. На стержне 9 установлен уровень. Поворот визирной линейки осуществляется наблюдателем ча целью при помощи ручки, установленной на нижнем конце этой линейки. Коленчатый стержень i// может перемещаться параллельно самому себе и стержню 9 в направляющем отверстии стойки 5, сколь: я одновременно своей втулкой по стержню 9. Равноплечий рыча /2 (парнирно установлен на оси 13, которая закреплена в стсйке 14. Втулка юго рычага сочленена с фигурным рычагом 15, поворотным на оси /J. Рычаг /5 оканчивается роликом 17, упирающимся поя действием 18 в торцовую плоскость шестерни 19 часового механизма, с, днчном случае ролик 17 находится в углублении на торце щеciepHH /9. При этом часовой механизм 20 выключен.
При продольном перемещении стержня 9, т. е., когда осуществляется ви.- ирование на цель, выступ на конце этого стержня поворачивав рычаг 75 вскруг его оси. Вилка этого рычага, расположенная в кольиевой канавке двуплечего рычага 12, передвинет последний вдоль оси /5 влево, вследствие чего рабочие плоскости этого рычага расположатся против колена стержня 9 и горца стержня //. Далее ролик /7 выйдет из углубления и благодаря этому часовой механизм будет включен. За время действия часового механизма, т. е. за олин оборот шестерни 19. происходит механическое откладывание значения скорости полета продольным перемещением стержня // под действием визирной линейки, сообщающей поступательное движение этому стержню посредством описанной выше рычажной передачи. Часовой механизм действует определенное время, т. е. в течение одного оборота шестерни 19. Последняя включается рычагом 15 при попадании ролика 17 в углубление на шестерне. Рычаг 12 ставится в нерабочее положеsY
tga A-..(5)
-ние и поэтому поступательное движение коленчатого М прекращается. Таким образом, с изменением скорости полета v соответст-венно меняется величина ее отложения в единицу времени на приборе, измеряемая расстоянием от стойки 5 влево вдоль стержня 9, поэтому угол прицеливания будет увеличиваться с возрастанием скорости и наоборот - при уменьшении скорости. На втулке стержня 11, скользящей по стержню 9, и на пальце 10 стержня 9, установлены электроконтакты, к которым подведены провода 2-1 и 22 от батареи. Как только цель окажется под соответствующим углом к вертикали приближающегося самолета, произойдет замыкание электроцепи, а следовательно, и действие светового сигнала или бомбосбрасывающего механизма.
Предмет изобретения
Бомбардировочный прицел с визиром, имеющий контакт, включенный в цепь бомбосбрасывателя или другого сигнала и механически связанный с помощью горизонтального стержня, перемещаемого при слежении за целью со скоростью, пропорциональной земной скорости самолета со вторым, включенным в ту же цепь .контактом, перемещаемым визиром от вертикали навстречу первому контакту на величину, пропорциональную тангенсу угла прицеливания во время работы часового механизма, отличающийся тем, что для встречного перемещения контакта, определяющего угол прицеливания, применен несущий его стержень, связанный при помощи равноплечего рычага первого рода на время работы часового г./еханизма прицела с горизонтальным стержнем визира.
3 -№ 67808
Vua t
AA
19
2i 2
| название | год | авторы | номер документа |
|---|---|---|---|
| ОРУЖЕЙНАЯ УСТАНОВКА С ПРИЦЕЛЬНЫМ УСТРОЙСТВОМ И СПОСОБ ЕГО ВЫВЕРКИ | 2003 |
|
RU2235263C1 |
| ПРИБОР ДЛЯ ПОЛУЧЕНИЯ ИСХОДНЫХ ДАННЫХ ПРИ ЗЕНИТНОЙ СТРЕЛЬБЕ | 1925 |
|
SU4656A1 |
| ОРУЖЕЙНАЯ УСТАНОВКА С ПРИЦЕЛЬНЫМ УСТРОЙСТВОМ И СПОСОБ ЕГО ВЫВЕРКИ | 2014 |
|
RU2553044C1 |
| Пулеметный прицел с кольцевой мушкой для стрельбы по самолетам | 1926 |
|
SU51692A1 |
| Логарифмическая счетная машина | 1928 |
|
SU20375A1 |
| Визирный механический прицел | 2022 |
|
RU2787535C1 |
| Прицел для бомбометания с летательных аппаратов, определяющий путевую скорость ееинрованием по некоторой точке в течение определенного промежутка времени | 1927 |
|
SU17750A1 |
| Способ определения угла прицеливания и прицел для бомбометания, основанный на этом способе | 1942 |
|
SU67839A1 |
| Прицельный прибор для летательных аппаратов | 1931 |
|
SU50293A1 |
| СПОСОБ ЦЕЛЕУКАЗАНИЯ ПО НАПРАВЛЕНИЮ СИСТЕМЕ НАВЕДЕНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА | 2020 |
|
RU2751433C1 |