Изобретение относится к способам целеуказания по направлению системе наведения управляемого объекта и может быть использовано при создании новых и модернизации существующих способов и устройств целеуказания по направлению в системах наведения управляемых объектов - как дистанционно пилотируемых (беспилотных) летательных аппаратов, так и в пилотируемой авиации. Способ целеуказания по направлению системе наведения управляемого объекта может быть использован для предварительного наведения линии визирования целевой нагрузки на зону интереса, для повторного наблюдения за ранее известными целями, для доразведки целей по полученными извне координатам (введенных оператором или определенных другими компонентами целевой нагрузки).
Известен способ целеуказания по направлению системе наведения управляемого объекта из патента РФ №2117902 с датой приоритета 09.07.1997, который состоит в том, что разворачивают визир системы наведения управляемого объекта в вертикальной и горизонтальной плоскостях в сторону уменьшения соответствующих углов до их нулевых значений. Далее измеряют расстояние D между целью и некоторой точкой (вне цели) и магнитный азимут Кци цели относительно этой точки, определяют широту ψи и долготу λи этой точки, вводят значения D, Кци, ψи, λи в установленный в районе этой точки вычислитель, в который предварительно вводят цифровую карту района расположения цели и этой точки. Затем вычисляют широту ψц, долготу λц и высоту Нц над уровнем моря места расположения цели и передают эти координаты цели по радиоканалу на носитель управляемого объекта. На этом носителе определяют широту ωо и долготу λо его местонахождения, измеряют высоту Нор его полета над рельефом местности, магнитный азимут Кмн продольной оси этого носителя и угол ориентации Вов этой оси в вертикальной плоскости, а также углы Влв и Алв ориентации соответственно в вертикальной и горизонтальной плоскостях оси визира системы наведения управляемого объекта относительно продольной оси его носителя. Вводят значения ψц, λц, Нц, Нор, ψо, λо, Кмн, Вов, Влв и Алв в вычислитель носителя управляемого объекта, куда предварительно вводят цифровую карту района, в которой проходит маршрут полета носителя управляемого объекта. Затем вычисляют на носителе углы ориентации в вертикальной и горизонтальной плоскостях вектора дальности носитель - цель и углы Авц, Ввц ориентации в горизонтальной и вертикальной плоскостях оси визира системы наведения управляемого объекта относительно вектора дальности носитель - цель, нулевые значения которых обеспечивают при развороте визира системы наведения управляемого объекта.
Недостатками известного способа целеуказания по направлению системе наведения управляемого объекта являются сложность в реализации способа и низкая точность, обусловленные особенностями наведения визирного устройства. Так, данные для наведения на цель передаются не напрямую с воздушного судна, а через вычислитель, находящийся на земле, что требует расширенного аппаратного обеспечения для реализации способа, повышает вероятность ошибки.
Известен способ слежения за подвижным объектом из патента РФ 2473934 с датой приоритета 19.10.2011, при реализации которого проводят определение и установку исходных размеров поля зрения визирного устройства прибора слежения, совмещение его с объектом слежения и удержание в таком положении в течение заданного времени. Далее формируют стабилизированную линию визирования и юстируют ее в исходном состоянии с оптической осью визирного устройства прибора слежения, определяют направление и величину угловой скорости ухода от оптической оси визирного устройства прибора слежения стабилизированной линии визирования, перемещают с этой же скоростью стабилизированную линию визирования в противоположном направлении, совмещают ее с точкой визирования на объекте слежения. При маневрировании визирного устройства прибора слежения измеряют угол его крена, угол возвышения линии визирования, определяют угол отклонения линии визирования от заданного положения и перемещают ее в обратном направлении на этот же угол в заданное положение, при перемещении объекта слежения измеряют и запоминают направление и величину его угловой скорости ωo, определяют ее математическое ожидание ωo.мож и среднеквадрэтическое отклонение ωо.ско, автоматически перемещают линию визирования с угловой скоростью ωлв=ωо.мож в направлении движения объекта слежения, подсвечивают визирный индекс, плавно изменяют яркость и цвет его подсветки до достижения им оптимального контраста с объектом слежения, уменьшают поле зрения до размера  где В - уменьшаемый угловой размер поля зрения визирного устройства прибора слежения, Во - угловой размер объекта слежения, σв - среднеквадратическое значение ошибки визирования, σю - среднеквадратическое значение ошибки юстировки линии визирования с оптической осью визирного устройства, tи - время инерции системы «глаз - визирное устройство - прибор слежения». По истечении времени tз+tи, где tз - заданное время визирования, восстанавливают исходные размеры поля зрения визирного устройства прибора слежения.
где В - уменьшаемый угловой размер поля зрения визирного устройства прибора слежения, Во - угловой размер объекта слежения, σв - среднеквадратическое значение ошибки визирования, σю - среднеквадратическое значение ошибки юстировки линии визирования с оптической осью визирного устройства, tи - время инерции системы «глаз - визирное устройство - прибор слежения». По истечении времени tз+tи, где tз - заданное время визирования, восстанавливают исходные размеры поля зрения визирного устройства прибора слежения.
Недостатками известного способа слежения за подвижным объектом являются сложность вычислений и низкая точность. Сложность обусловлена характером и количеством операций, которые необходимо провести для осуществления способа. Низкая точность обусловлена тем, что при реализации способа не решена проблема автоматического наведения линии визирования на цель.
Известен способ целеуказания при прицеливании на вертолетном комплексе из патента РФ №2697939 с датой приоритета 20.08.2018 г. (прототип), который состоит в том, что точка целеуказания задается оператором по изображению, наблюдаемому им на мониторе обзор но -прицельной системы (ОПС) с оптико-электронной системой (ОЭС) прицела, работающей в видимой, средней и дальней инфракрасных областях спектра. Оператор производит электронный захват цели и передачу функции последующего слежения за ней на систему автосопровождения за целью по изображению от ОЭС камеры, установленной на гирокоординаторе ракеты, имеющей значения угла поля зрения и разрешения чувствительной матрицы камеры иные, чем значения этих характеристик для ОЭС прицела. Из цифрового изображения сцены с ОЭС прицела вырезается и запоминается фрагмент изображения вокруг точки целеуказания, а полное цифровое изображение сцены с ОЭС прицела сжимается для получения соответствия метрических характеристик ОЭС прицела и камеры гирокоординатора. Фрагмент и сжатое изображение обрабатываются региональным градиентным оператором. Получаемые от ОЭС камеры изображения, также обрабатываются тем же региональным градиентным оператором, используя сжатое и обработанное изображение от прицела. Производится операция сопоставления его с несжатым изображением от ОЭС камеры средствами функции нормированной кросс-корреляции для нахождения точки целеуказания на изображении ОЭС камеры. Координаты найденной точки передаются в систему автосопровождения для дальнейшего слежения за целью. При дальности, когда метрика запомненного фрагмента совпадает с метрикой текущего изображения от ОЭС камеры гирокоординатора, производится повторная нормированная кросс-корреляция этого фрагмента с некоторой областью изображения (обработанной градиентным оператором) около текущей точки слежения для ее коррекции.
Недостатками известно способа целеуказания при прицеливании на вертолетном комплексе также является сложность осуществления способа. Сложность обусловлена характером и количеством операций, которые необходимо провести для осуществления способа.
Технической проблемой, решение которой обеспечивается при использовании предлагаемого способа, является простое, быстрое и точное осуществление целеуказания по направлению системе наведения управляемого объекта.
Технические результаты заявляемого решения заключаются:
- в упрощении осуществлении способа;
- в повышении точности наведения вектора линии визирования на цель за счет использования контура обратной связи по рассогласованию текущих и заданных координат, коррекции контура по каждой из осей посредством использования комбинированного линейно-нелинейного фильтра;
- в повышении быстроты осуществления способа, так как все операции для реализации способа выполняются непосредственно на воздушном судне.
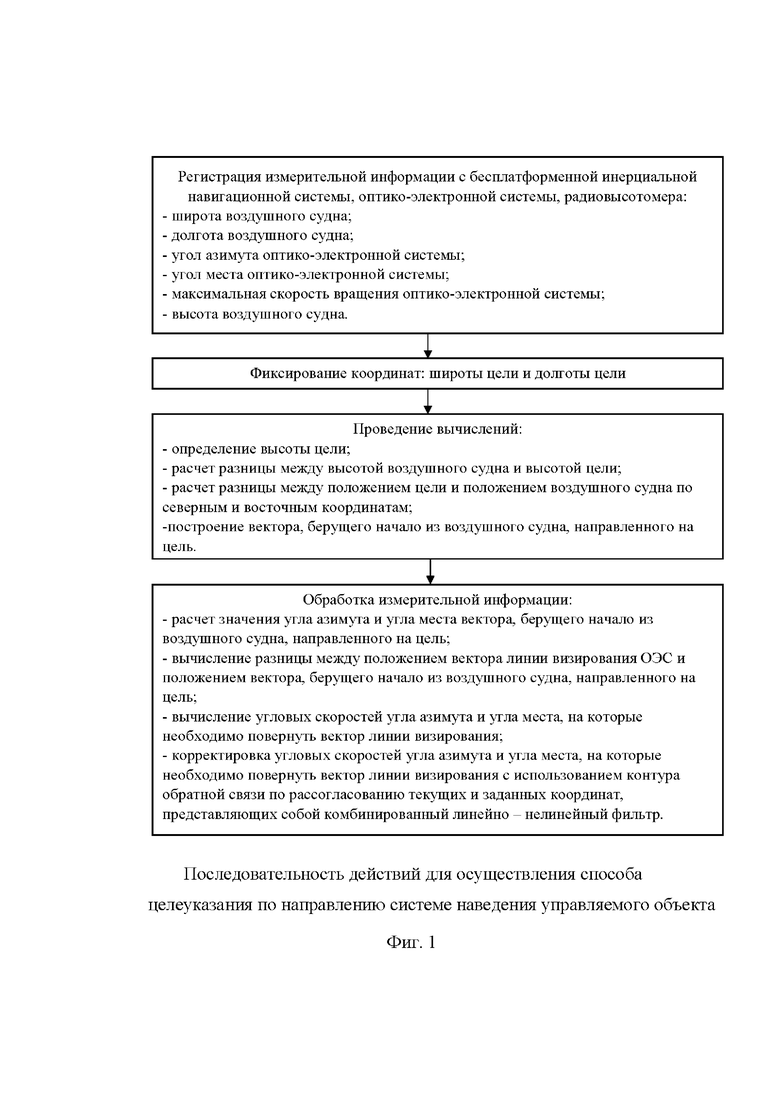
Данные технические результаты достигаются за счет того, что способ целеуказания по направлению системе наведения управляемого объекта заключается в регистрации измерительной информации с бесплатформенной инерциальной навигационной системы (далее - БИНС), оптико-электронной системы (далее - ОЭС), радиовысотомера, установленных на воздушном судне, проведении вычислений и обработке измерительной информации. При этом сначала формируется массив данных, включающий широту и долготу воздушного судна, угол азимута ОЭС и угол места ОЭС, максимальную скорость вращения ОЭС. Фиксируются координаты цели (широта цели, долгота цели.). Определяется высота цели. Вычисляется разница между высотой воздушного судна и высотой цели. Рассчитывается разница между положением цели и положением воздушного судна по северным и восточным координатам. Выстраивается вектор, берущий начало из воздушного судна, направленный на цель. Рассчитываются значения угла азимута и угла места вектора, берущего начало из воздушного судна, направленного на цель. Вычисляется разница между положением вектора линии визирования ОЭС и положением вектора, берущего начало из воздушного судна, направленного на цель по углу азимута и углу места. Рассчитываются угловые скорости угла азимута и угла места, на которые необходимо повернуть вектор линии визирования. Проводится корректировка угловых скоростей угла азимута и угла места, на которые необходимо повернуть вектор линии визирования, с использованием контура обратной связи по рассогласованию текущих и заданных координат, представляющих собой комбинированный линейно-нелинейный фильтр.
Регистрация измерительной информации производится в течение временного интервала, обеспечивающего определение измеряемой величины с необходимой точностью.
На фиг. 1 представлена последовательность действий для осуществления способа целеуказания по направлению системе наведения управляемого объекта.
Рассмотрим реализацию предлагаемого способа на примере осуществления способа целеуказания по направлению системе наведения управляемого объекта в условиях наличия исходной информации, постановки полетного задания.
Решение данной задачи осуществляется следующим образом. Проводят регистрацию измерительной информации, вычисления, обработку измерительной информации с использованием предварительно проведенных вычислений.
Регистрацию измерительной информации осуществляют устройства, установленные на воздушном судне: БИНС, ОЭС, радиовысотомер.
Данные, регистрирующиеся в БИНС:


Данные, регистрирующиеся в ОЭС:



Данные, регистрирующиеся радиовысотомером:

В дополнение к формируемому массиву измерительной информации, полученному с оборудования, установленного на воздушном судне, оператору поступают координаты цели, на которую необходимо навести ОЭС:


Оператор вводит координаты цели в карту, в которую заранее загружена матрица высот. Матрица высот содержит в себе высоты тех или иных точек на карте местности.
При сопоставлении заданных координат широты и долготы цели с матрицей высот, определяют:

Далее проводят обработку измерительной информации:
Зная координаты и высоту цели, проводят следующие вычисления:
1) Расчет разницы между высотой воздушного судна (6) и высотой цели (9):

2) Расчет разницы между положением цели (7)-(8) и положением воздушного судна (1)-(2) по северным и восточным координатам:


На основе необходимого набора расчетной информации ΔН, ΔLat, ΔLon, строят вектор (TV), который берет начало в ВС, направленный на цель, на основе расчетов разницы между северными и восточными координатами ВС и цели и, разницей высот ВС и цели.
Далее проводят обработку измерительной информации, поступающей с ОЭС (3)-(4).
На первом этапе обработки измерительной информации, для построенного вектора (TV) рассчитывают значения угла азимута (αTV) и угла места (βTV). Расчет значений угла места и угла азимута вектора (7V) реализуется следующим образом: используя программный функционал, по координатам запрашивается положение точки цели на плоскости и относительно нее, к конструкторской оси самолета, рассчитывается угол места и угол азимута.
Значения угла азимута (αTV) и угла места (βTV) используют для вычисления разницы между положением угла азимута и угла места вектора (TV) и текущим положением угла азимута и угла места вектора линии визирования:


Полученные значения Δα и Δβ из уравнений (13)-(14), используются для корректировки угловых скоростей угла азимута и угла места, на которые необходимо повернуть вектор линии визирования.
В целях повышения точности способа целеуказания по направлению системе наведения управляемого объекта используется контур обратной связи по рассогласованию текущих и заданных координат. Коррекция контура обратной связи по каждой из осей представляет собой комбинированный линейно-нелинейный фильтр.
Одним из основных преимуществ в использовании контура заключаются в следующем:
- Регистрируемый поток данных имеет резкий шум, который влияет на точность вычислений. Поэтому, для ликвидаций последующих неточностей в вычислениях, применяется комбинированный линейно-нелинейный фильтр второго порядка, в зоне с малым коэффициентом. Применение фильтра обеспечивает стабилизацию в моменте наведения вектора линии визирования на цель.
- Также преимущество в использовании контура заключается в следующем. Рассматривая контур, с точки зрения устойчивости, коэффициент внешнего контура, подобран таким образом (большая зона), что при попадании в большую зону вектора линии визирования, вектор становиться относительно устойчив, что позволяет ему стабилизироваться с малым запасом и позволяет гладко перейти в зону с малым коэффициентом.
Фильтр состоит из:







На основании значений (15)-(21), выведем зависимость вида:

Уравнение (22) - зависимость, описывающая формирование коррекции контура обратной связи. Также, используя расчетные значения угловых скоростей угла азимута и угла места, на основе которых составляют и вычисляют значения большой и малой зоны контура.
В первую очередь, формируются границы для большой зоны, используя заранее установленное значение (15) и затем, в соответствии по вычисленным угловым скоростям угла азимута и угла места, составляется:

После сформированного значения большой зоны, полученной в уравнении (23), корректируем составную часть большой зоны - малую зону, в которой используем уравнение (22).

где z - значение большой зоны, у1 - значение малой зоны, а х - значение угловой скорости по углу места и углу азимуту.
После наложения на полученные значения угловых скоростей, угла азимута и угла места, комбинированного линейно-нелинейного фильтра получают скорректированные значения соответствующих угловых скоростей поворота вектора линии визирования относительно цели с минимизированной погрешностью наведения.
Таким образом, упрощение осуществлении способа, повышение точности наведения вектора линии визирования на цель, повышение быстроты осуществления способа достигается за счет того, что способ целеуказания по направлению системе наведения управляемого объекта заключается в регистрации измерительной информации с БИНС, ОЭС, радиовысотомера, установленных на воздушном судне, проведении вычислений и обработке измерительной информации. При этом сначала формируется массив данных, включающий широту и долготу воздушного судна, угол азимута ОЭС и угол места ОЭС, максимальную скорость вращения ОЭС. Фиксируются координаты цели (широта цели, долгота цели.). Определяется высота цели. Вычисляется разница между высотой воздушного судна и высотой цели. Рассчитывается разница между положением цели и положением воздушного судна по северным и восточным координатам. Выстраивается вектор, берущий начало из воздушного судна, направленный на цель. Рассчитываются значения угла азимута и угла места вектора, берущего начало из воздушного судна, направленного на цель. Вычисляется разница между положением вектора линии визирования ОЭС и положением вектора, берущего начало из воздушного судна, направленного на цель по углу азимута и углу места. Рассчитываются угловые скорости угла азимута и угла места, на которые необходимо повернуть вектор линии визирования. Проводится корректировка угловых скоростей угла азимута и угла места, на которые необходимо повернуть вектор линии визирования, с использованием контура обратной связи по рассогласованию текущих и заданных координат, представляющих собой комбинированный линейно-нелинейный фильтр.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОГРАММНО-КОРРЕКТИРУЕМОГО СОПРОВОЖДЕНИЯ ЦЕЛИ | 2022 |
|
RU2795367C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО (НАДВОДНОГО) ОБЪЕКТА | 2020 |
|
RU2749194C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2010 |
|
RU2464617C2 |
| СПОСОБ АСТРОКОРРЕКЦИИ | 2016 |
|
RU2641619C1 |
| ОБЗОРНО-ПРИЦЕЛЬНАЯ СИСТЕМА ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2391262C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕКТОРА СОСТОЯНИЯ ПАССИВНОГО КОСМИЧЕСКОГО ОБЪЕКТА | 2013 |
|
RU2542836C2 |
| СПОСОБ СКАНИРОВАНИЯ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ ПО КУРСУ | 2020 |
|
RU2755650C1 |
| СПОСОБ ЦЕЛЕУКАЗАНИЯ ПО НАПРАВЛЕНИЮ СИСТЕМЕ НАВЕДЕНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА | 1997 |
|
RU2117902C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА НА МЕСТНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2242019C2 |
| КОМБИНИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ АСТРОИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2017 |
|
RU2654965C1 |
Изобретение относится к способам целеуказания по направлению системе наведения управляемого объекта и может быть использовано при создании новых и модернизации существующих способов и устройств целеуказания по направлению в системах наведения управляемых объектов - как дистанционно пилотируемых (беспилотных) летательных аппаратов, так и в пилотируемой авиации. Способ целеуказания по направлению системе наведения управляемого объекта заключается в регистрации измерительной информации с бесплатформенной инерциальной навигационной системы (далее - БИНС), оптико-электронной системы (далее - ОЭС), радиовысотомера, установленных на воздушном судне, проведении вычислений и обработке измерительной информации. При этом сначала формируется массив данных, включающий широту и долготу воздушного судна, угол азимута ОЭС и угол места ОЭС, максимальную скорость вращения ОЭС. Фиксируются координаты цели (широта цели, долгота цели). Определяется высота цели. Вычисляется разница между высотой воздушного судна и высотой цели. Рассчитывается разница между положением цели и положением воздушного судна по северным и восточным координатам. Выстраивается вектор, берущий начало из воздушного судна, направленный на цель. Рассчитываются значения угла азимута и угла места вектора, берущего начало из воздушного судна, направленного на цель. Вычисляется разница между положением вектора линии визирования ОЭС и положением вектора, берущего начало из воздушного судна, направленного на цель по углу азимута и углу места. Рассчитываются угловые скорости угла азимута и угла места, на которые необходимо повернуть вектор линии визирования. Проводится корректировка угловых скоростей угла азимута и угла места, на которые необходимо повернуть вектор линии визирования, с использованием контура обратной связи по рассогласованию текущих и заданных координат, представляющих собой комбинированный линейно-нелинейный фильтр. Технический результат заявляемого решения заключаются: в упрощении осуществлении способа; в повышении точности наведения вектора линии визирования на цель за счет использования контура обратной связи по рассогласованию текущих и заданных координат, коррекции контура по каждой из осей посредством использования комбинированного линейно-нелинейного фильтра; в повышении быстроты осуществления способа, так как все операции для реализации способа выполняются непосредственно на воздушном судне. 1 ил.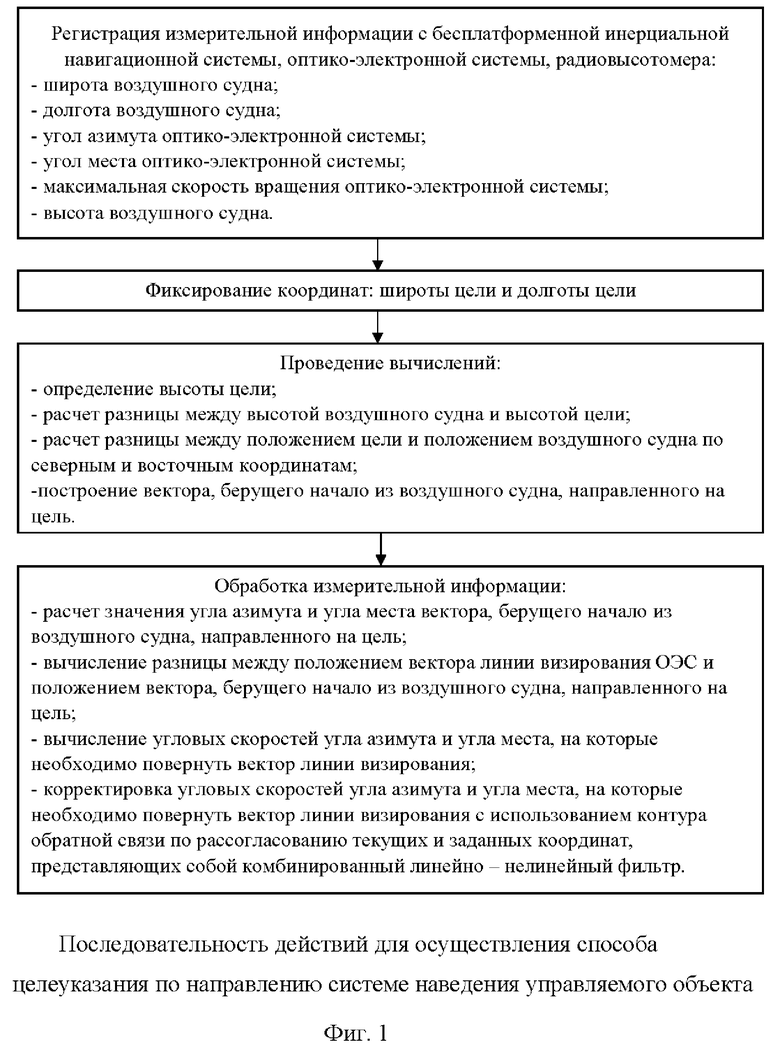
Способ целеуказания по направлению системе наведения управляемого объекта, заключающийся в регистрации измерительной информации с установленных на воздушном судне бесплатформенной инерциальной навигационной системы, оптико-электронной системы, радиовысотомера - высоты воздушного судна, координат воздушного судна - широты и долготы, углов наклона оптико-электронной системы - угла азимута и угла места, максимальной скорости вращения оптико-электронной системы, фиксировании координаты цели - широты и долготы, проведении расчетов и обработки измерительной информации, при этом на этапе проведения расчетов определяют высоту цели, отличающийся тем, что на этапе проведения расчетов дополнительно вычисляют разницу между высотой воздушного судна и высотой цели, рассчитывают разницу между положением цели и положением воздушного судна по северным и восточным координатам, проводят построение вектора, берущего начало из воздушного судна, направленного на цель, на этапе обработки измерительной информации последовательно рассчитывают значения угла азимута и угла места вектора, берущего начало из воздушного судна, направленного на цель, вычисляют разницу между положением вектора линии визирования оптико-электронной системы и положением вектора, берущего начало из воздушного судна, направленного на цель по углу азимута и углу места, рассчитывают угловые скорости угла азимута и угла места, на которые необходимо повернуть вектор линии визирования, проводят корректировку угловых скоростей угла азимута и угла места, на которые необходимо повернуть вектор линии визирования с использованием контура обратной связи по рассогласованию текущих и заданных координат, представляющих собой комбинированный линейно-нелинейный фильтр.
| СПОСОБ АВТОМАТИЗАЦИИ ЦЕЛЕУКАЗАНИЯ ПРИ ПРИЦЕЛИВАНИИ НА ВЕРТОЛЕТНОМ КОМПЛЕКСЕ | 2018 |
|
RU2697939C1 |
| СПОСОБ НАВЕДЕНИЯ РАКЕТЫ, УПРАВЛЯЕМОЙ ЛУЧОМ РАДИОЛОКАЦИОННОЙ СТАНЦИИ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2473867C1 |
| СПОСОБ ЦЕЛЕУКАЗАНИЯ ПО НАПРАВЛЕНИЮ СИСТЕМЕ НАВЕДЕНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА | 1997 |
|
RU2117902C1 |
| СИСТЕМА ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ СКРЫТНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В ЗОНЕ ОБНАРУЖЕНИЯ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС | 2017 |
|
RU2686802C1 |
| СПОСОБ КОМАНДНОГО ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2000 |
|
RU2188381C2 |
| СПОСОБ И СИСТЕМА ОЦЕНКИ ЗОНЫ ПОПАДАНИЯ БОЕВОЙ НАГРУЗКИ, ЗАПУСКАЕМОЙ С ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2473861C2 |
| СПОСОБ ПОЛУЧЕНИЯ КОМПОЗИЦИОННЫХ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ НА ОСНОВЕ НИТРИДА КРЕМНИЯ | 2017 |
|
RU2647540C1 |

