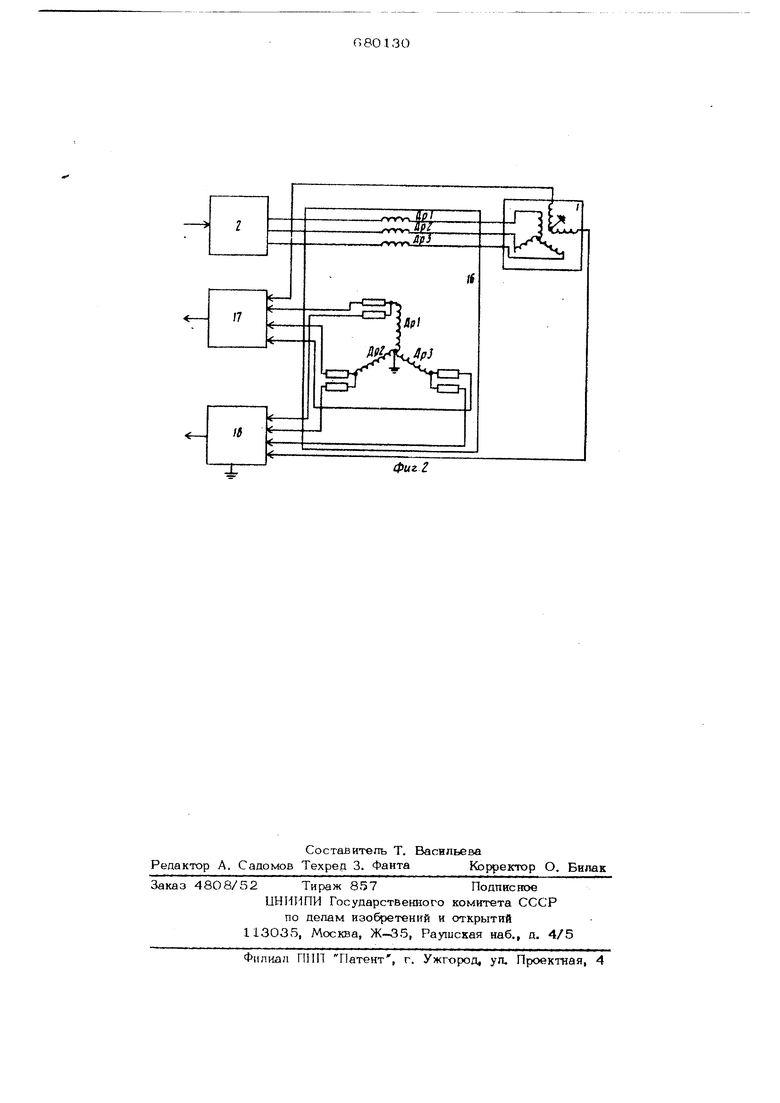
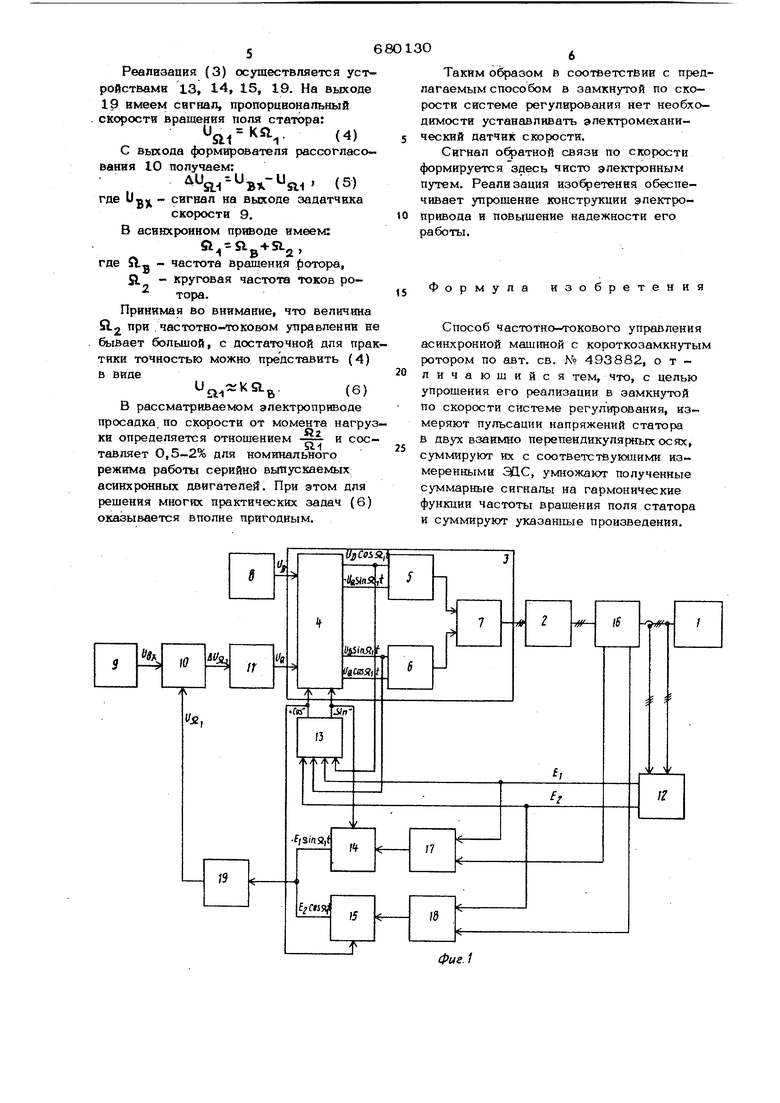
шими ЭДС, умножают полученные суммар ные сигналы на гармонические функции частоты вращения поля статора и, суммируя указанные произведения, получают сигнал об истинной величине скорости вращения ротора. Указанный сигнал принимают в качестве сигнала обратной связи по скорости. На фиг. 1 представлена структурная схема электропривода, реализующего описываемый способ; на фиг. 2 представ лена электрическая схема одного из узлов электропривода - измерителя пульсаций напряжений статора. Асинхронный двигатель 1 питается токами от статического преобразователя тока 2, на входь которого поступают сигналы с блока управления 3. Бпок управления 3 содержит элементы умно- жения 4, суммирования 5, 6 и преобразо ватель 7 двухфазного напряжшия в трех фазное. Задатчик 8 входного независимого сигнала Uj. (задает намагничивающий ток двигателя) соединен с одним из вх дов блока управления 3. Задатчик скорости 9 через формирователь рассогласования 10 н блок коррекции 11 соединен с другим входом блока управления 3 (с сигналом UQ). Измеритель 12 синусной и косинусной составляющих ЭДС двигателя Е и Ее подключен своими входами к датчикам фазных токов и напряжений. Выходы из мерителя подключены ко входам определителя гармонических функций частоты статора 13. На другие входы определителя 13 поступают сигналы, пропорциональные составляющим входного сигнала U-J3 . Выходы определителя связаны со Входами блока управления 3, а такж со Входами элементов умножения 14 и 1 Измеритель пульсаций 16 подключен своими выходами через элементы сумм рования 17 и 18 ко входам элементов умножения 14 и 15, выходы которых через элемент суммирования 19 подсое динены к формирователю рассогласования 10. В paccMaTpitBaeMOM электроприводе измеритель синусной Е и косинусной составляющих ЭДС двигателя выполнен в виде двух дополнительных обмоток, наматываемых в пазы двигателя -и располагаемых так, оси обмоток бы сдвинуты друг относительно друга на 9О эл.градусов. Е и Е поступают на Входы элементов суммирования 17 и 18 соответственно. Характер изменений Е и Е - определяется суммой основных гармонических составляющих, изменяющихся от скорости, и пупьснрукяцих составлякядшс, Ёозникакшнх при работе двигателя от статического преобразователя. Величина и форма этих пульсирующих составляющих в электроприводе зависит как от индуктивности рассеяния статора и ротора, так и от ивдуктиввостн силовых дросселей Др1, Др2, ДрЗ, включенньрс последовательно с каждой из фаз двигателя. Пренебрегая активным сопротивлением статора|оказывается возможкым Выделить пульсирующие составляющие Е. и Е 2 на вторичных обмотках указанных дросселей и подключить их в противофазе к пульсирующим составляющем, содержащимся в Е . и Е о с целью их компенсации. Для этого вторичные обмотки дросселей Др1, Др2, и ДрЗ соединены в звезду (см. фиг. 2). Каждая из фаз этой звезды через соот- ветствуюшие масщтабные резисторы подсоединена ко входам элементов суммирования 17 и 18. Общая точка двух обмоток измерителя составляющих ЭДС и средняя точка звезды должны быть подключены к общей шине элементов суммирования. С выходов 17 и 18 на входы элементов умножения 14 и 15 поступают составлякндие ЭйС Е и Е„ , свободные от пульсаций, возникающих в результате импульсного характера работы статического преобразователя тока. Покажем, каким образом в соответствии с предлагаемым способом в электроприводе формируется сигнал, пропорциональный скорости вргццения ротора. С Выходов элементов суммирования 17 и 18 получаем: E KSl sinSt -b,Ш , E -KSl CosSI -b С2) где Е. , Е- - синусная и косинусная составляющие ЭДС двигателя;Q.J - круговая частота вращения поля статора; К - коэффициент пропорциональности, постоянный при УЗ) - consi (т.е. при условии постоянства потока). Умножив обе части ( 1) на sin SLt , а обе части (2) HaCOSSL,, после сложения (1) и (2) получаем: H siHSJ- -ti E ccjsa-b ksi й1 Реализация (3) осуществляется устройствами 13, 14, 15, 19. На выходе 19 имеем сигнал, пропорциокапьный скорости вращения поля статора: (4) С Выхода формирователя рассогласования 10 получаем: Л. (5) где - сигнал на выходе задатчика скорости 9. В асинхронном приводе имеем: fil ftpH-Я,,, где Л- - частота вращения ротора, SI - круговая частота токов ротора. Принимая во внимание, что величина Sl2 РИ частотно-токовом управлении не &1Вает большой, с достаточной для пра тики точностью можно представить (4) в виде .(6) В рассматриваемом электроприводе просадка.по скорости от момента нагруз ки определяется отношением к составляет 0,5-2% для номинального режима работы серийно выпускаемых асинхронных двигателей. При этом для рещения многих практических задач (6) оказывается вполне пригодным. Таким образом в соответствии с предлагаемым способом в замкнутой по скорости системе регулирования нет необходимости устанавливать электромеханический датчик скорости. Сигнал обратной связи по скорости формируется здесь чисто электронным путем. Реализация изобретения обеспечивает упрощение конструкции электропривода и повышение надежности его работы. Формула изобретения Способ частотно-стокового управления асинхронной маш1шой с короткозамкнутым ротором по авт. св. № 493882, отличающийся тем, что, с целью упрощения его реализации в замкнутой по скорости системе регулирования, измеряют пульсации напряжений статора в двух взаимно перепендикулярныхосях, суммируют их с соответствующими измеренными 3UC, умножают полученные суммарные сигналы на гармонические функции частоты вращения поля статора и суммируют указанные произведения.

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1975 |
|
SU661705A1 |
| Электропривод с машиной переменного тока | 1976 |
|
SU675568A1 |
| Электропривод переменного тока | 1981 |
|
SU1014117A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
| Электропривод с асинхронной машиной с фазным ротором | 1979 |
|
SU1108597A2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| Электропривод переменного тока | 1979 |
|
SU849404A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2011 |
|
RU2477562C1 |
| Частотно-регулируемый асинхронный электропривод | 1983 |
|
SU1119155A1 |