3
тяги один командоапяарат в-место двух (для управления механизмом поворота должен использоваться еще один командоаппарат), что несколько зшрощает управление перемещением ковща только в вертикальной плоскости.
Однако, приводя к существенному усложнению (в него дополнительно введены два исполнительных двигателя, два механических дифференциала, четыре синусо-косинусных вращающихся трансформатора, восемь аналоговых нелинейных функциональных преобразователей и несколько линейных рещающих элементов), устройство не обеспечивает согласованного движения механизмов поворота, подъема и тяги, попрежпему оставленного за мащинистом, что требует от него повьищенного внимания для исключения выхода ковша за пределы рабочей зоны и перемещения в требуемое положение, обеспечения обхода близкого к стреле отвала, а это зслолсняет управление, уменьщает его надежность и затрудняет получение высокой производительности. Сложность аналоговой пересчетной схемы уменьшает точность управления, что снижает его надежлость.
Целью изобретения является повьш ение производительности экскаватора за счет повышения точности и надежности управления.
Это достигается тем, что устройство снабл ено логическими элементами равнозначности, четырьмя логическими элементами И, тремя логическими элементами НЕ, двумя триггерами, элементом задержки, тремя ключами наладки, ключом режима, управляемым ключом, усилителем с регулируемым коэффициентом усиления, реверсивными счетчиками имиз льсов и тремя подключенными ко входам схем управления механизмами поворота, подъема и тяги цифроаналоговыми схемами соответственно поворота, подъема и тяги, каждая из которых включает соединенные последовательно управляемый ключ, усилитель с ограничителем выходного напряжения, преобразователь код-напряжение, комбинационный сумматор, первую ключевую схему, регистр, вторую ключевую схему, соединенный с комбинационным сумматором реверсивный счетчик импульсов, синхронизатор импульсов и подключенные к двум входам последнего датчик перемещения командоапиарата и импульсный датчик перемещения соответствующего механизма поворота, подъема или тяги. При этом выход датчика перемещения механизма поворота подключен к входу реверсивного счетчика импульсов, к второму входу которого подключен один из ключей наладки, а выход его соединен с одним из входов логического элемента равнозначности, к второму входу которого подключен выход регистра цифро-аналоговой схемы поворота, а выход логического эле4
мента равнозначности через последовательно соединенные первый логический элемент И, логический элемент НЕ и второй логический элемент И подключен к усилителю с
ограничением выходного напряжения дифро-аналоговой схемы подъема, к одному из входов второго логического элемента И подключен один из выходов первого триггера, второй ВЫХОД которого соединен с
подключенным к усилителю с ограничением входного напряжения цифро-аналоговой схемы тяги третьему элементу И, к второму входу которого подключен выход второго триггера, соединенный через элемент задержки с входом первого триггера, к второму входу которого и к одному из входов второго триггера через второй элемент НЕ подключен соединенный с управляющими ключами цифро-аналоговых схем поворота
подъема и тяги ключ , к второму входу второго триггера подключен четвертый элемент И, к входам которого подключены счетчики импзльсов цифро-аналоговых схем поворота и подъема, ко входам
уставки нуля счетчиков импульсов дифроаналоговых схем поворота, подъема и тяги подключен второй ключ наладки, а третий ключ наладки подключен к управляющим входам вторых ключевых схем цифро-а,налоговых схем поворота, подъема и тяги, причем входы первых ключевых схем цифроаналоговых схем подъема и тяги и выход первого логического элемента И через третий элемент НЕ соединен с одним из входов управляющего ключа, к второму входу которого подключен выход преобразовате ля код-напряжение цифро-аналоговой схемы подъема, а выход управляемого ключа через усилитель с регулируемым коэффициентом усиления подключен к входу усилителя с ограничением выходного напряжения цифро-аналоговой схемы тяги, а к входу ключевой схемы цифро-аналоговой схемы поворота подключены выход первого
триггера и выход первого элемента И.
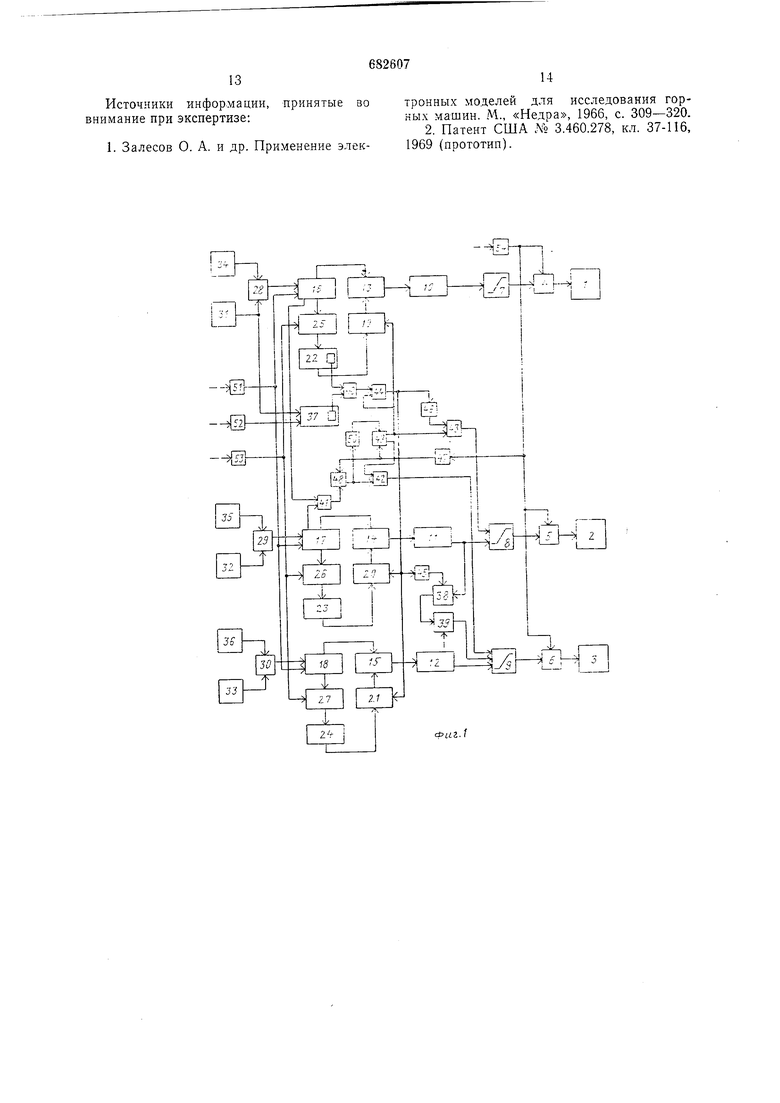
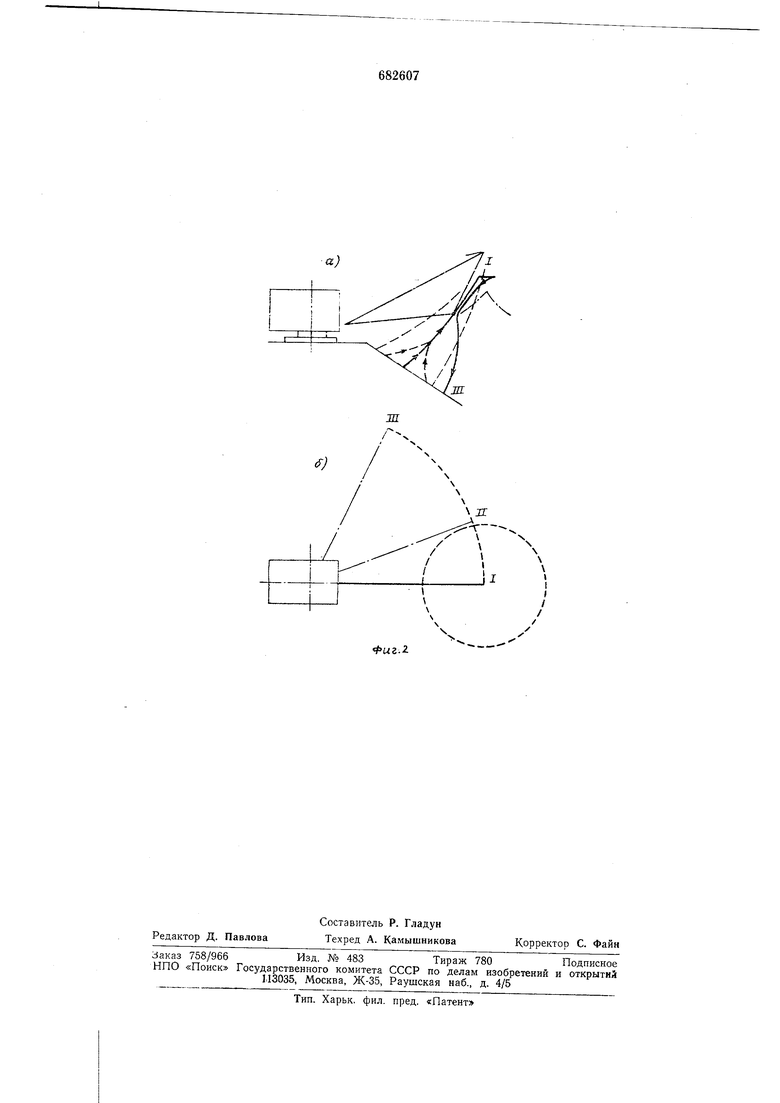
На фиг. 1 изображена схема предлагаемого з/стройства; на фиг. 2 показано перемещение ковша и механизмов в вертикальной (а) и горизонтальной (б) плоскостях.
Устройство включает три системы управления механизмами поворота /, подъема 2 и тяги .. К входу каждой из этих систем управления подключены три цифро-аналоговые схемы, каждая из которых включает последовательно соединенные управляемый ключ 4-6, усилитель с ограничением напряжения 7-9, преобразователь код-напряжение JO-12, комбинационный сумматор .13-15. подключенные к двум входам последнего реверсивные счетчики импзльсов 16-IS первой ключевой схемы 19-21 регистра 22-24 и второй ключевой схемы 25-27, вход которой соединен с выходом реверсивного счетчика импзльсов 16-18, а также соединенные со счетным входом реверсивного счетчика импульсов через синхронизатор импульсов 28-30, два импульсных датчика перемещения соответствующего механизма поворота 31, подъема 32 или 33 и его командоаппарат 34-36. Устройство содержит также подключенный к выходу имлульсного датчика 31 перемещения -механизма поворота дополнительный реверсивный счетчик импульсов 37, включенные последовательно -между выходом преобразователя код - напряжение 11 цифро-аналоговой схемы подъема и входом усилителя с ограничением выходного напряжения 9 цифро-аналоговой схемы тяги дополнительный управляемый ключ 38 и усилитель 39 с регулируемым коэффициентом усиления, логический элемент равнозначности 40, четыре логических элемента И 41-44, три логических элемента НЕ 45- 47, два триггера 48 и 49, элемент задержки 50, три ключа наладки 51-53 и ключ режима 54. Ключи наладки 51, 52, 53 представляют собой кнопки, переключатели или реле (в том числе и бесконтактные). Ключ режима 54 может (быть либо ручным (например кнопка, установленная на рукоятке командоаппарата), либо выходным элементом системы, фиксирующей завершение процесса заполнения ковша. Два входа логического первого элемента И 4J подключены к выходам реверсивных счетчиков импульсов поворота 16 и подъема 17, а его выход подключен к первому входу триггера 48, выход которого соединен с входом второго логического элемента И 42 и через элемент задержки 50 с первым входом второго триггера 49, первый выход которого соединен с входом второго логического элемента И 42, а второй его выход подключен к управляющему входу первой ключевой схемы поворота 19 и к входам третьего и четвертого логических элементов И 43 и 44. К входу четвертого логического элемента И 44 подключен также логический элемент равнозначности 40, два входа которого соединены со знаковыми разрядами регистра 22 и дополнительного реверсивного счетчика 37 поворота. Выход четвертого логического элемента И 44 соединен с управляющими входами первых ключевых схем подъема 20 и тяги 21, а через первый 45 и второй 46 логические элементы НЕ соответственно с управляющим входом дополнительного управляемого ключа 38 и входом третьего логического элемента И 43. Выход последнего и выход второго логического элемента И 42 подключены ко входам усилителей с ограничением выходного напряжения соответственно подъема 8 и тяги 9. Выход ключа режима 54 подключен к управляющим выходам трех управляемых ключей поворота 4, подъема 5 и тяги 6, а через третий логический элемент НЕ 47 - ко вторым входам ервого 48 и второго 49 триггеров. Выход ервого ключа наладки 51 подключен ко ходам уставки нуля трех реверсивных четчиков импульсов поворота 16, подъема 7 и тяги J8. Выход второго ключа налади 52 подключен ко входу уставки нуля доолнительного реверсивного счетчика имульсо.в поворота 37. Выход третьего клюа наладки 53 подключен к управляющим ходам вторых ключевых схем поворота 25, одъема 26 и тяги 27. Работает устройство следующим обраом. При отключенном ключе режима 54 разомкнуты управляемые ключи 4-6, вследтвие чего отсутствует воздействие на системы управления механизмами поворота 1, подъема 2 и тяги 3, которые могут при этом управляться вручную. Одновременно через третий логический элемент НЕ 47 на вторые входы первого и второго триггера 48 и 49 поступает сигнал, обеспечивающий начальное состояние этих триггеров (отсутствуют сигналы на выходе первого триггера 48 и на втором выходе второго триггера 49, соединенном с управляющим входом первой ключевой схемы поворота /5 и с входами третьего 43 и четвертого 44 логических элементов И). Для наладки устройства механизмы экскаватора перемещают в положение I (см. фиг. 2), соответствующее положению ковща перед началом разгрузки, и воздействием на первый ключ наладки 51 обеспечивают установку нуля трех реверсивных счетчиков импульсов поворота 16, подъема 17 и тяги 18. Затем механизм поворота устанавливается в положение И, соответству)ощее началу высокого отвала, и воздействием на второй ключ наладки 52 устанавливают нуль дополнительного счетчика импульсов 37 поворота, а после перемещения механизмов экскаватора в положение HI, соответствующее положению ковща в забое перед началом копания, воздействием на третий КЛЮЧ наладки 53 открывают вторые ключ-евые схемы поворота 25, подъема 26 и тяги 27, в результате чего из реверсивных счетчиков поворота 16, подъема 17 и тяги 18 в регистре поворота 22, подъема 23 и тяги 24 будут перенесены коды чисел, соответствующих положению ховща в забое и равных количеству импульсов, поступивпшх на входы указанных реверсивных счетчиков с выходов импульсных датчиков перемещения механизмов поворота 31, подъема 32 н тяги 33 при их перемещении от отвала к забою. Установив коэффнцпент усиления усилителя 39 в пределах 0,4-6,9, обеспечивают заданные траектории транспортировки ковща в рабочей зоне вертикальной плоскости, причем большему значению этого коэффициента соответствует более близкая к стреле траектория, которую необходимо выбирать при высоком и близком к стреле отвале. После окончания копания включается ключ режима 54 (при этом отключается рзчное управление, не показанное на чертеже), со вторых входов первого 4S и второго 49 триггеров снимается сигнал, поступивший на них с выхода логического элемента НЕ 47, а также , открываются управляемые ключи поворота 4, подъема 5 и тяги 6. При этом в реверсивных счетчиках импульсов ловорота 16, подъема /7 и тяги 1.8 записаны коды чисел, равных расстояниям соответствующих механизмов от положения разгрузки и соответствующих количеству импульсов, поступивших на входы этих реверсивньтх счетчиков с выходов импульсных датчиков перемещения механизмов поворота 31, подъема 32 и тяги 33 в процессе .перемещения этих механизмов от отвала к забою. Коды этих чисел будут записаны в комбинационных суММаторах поворота 13, подъема 14 и тяги 15, поскольку первые ключевые схемы поворота 19, подъема 20 и тяги 21 при этом закрыты. Таким образом, на входы систем управления механизма поворота /, подъема 2 и тяги 3 поступают сигналы, определяемые расстоянием этих механизмов от положения нагрузки соответственно через преобразователи код - напряжение 10-12, усилители с ограничением выходного напряжения 7-9, управляемые ключи 4-6. При этом механизмы поворота и подъема перемещаются к положению разгрузки с максимальной скоростью, соответствующей ограничению напряжения усилителей 7 и 8, что обеспечивает минимальное время перемещения и, следовательно, максимальную производительность экскаватора. Отличие движения механизма тяги, от которого в данном режиме не зависит производительность экскаватора, определяется тем, что на усилитель с ограничением выходного напрял ;ения тяги 9 подается также сигнал с выхода преобразователя код - напряжение подъема 7/ через усилитель 39 с регулируемым коэффициентом усиления и дополнительный управляемый ключ 38, который при этом открыт вследствие наличия сигнала на выходе первого логического элемента НЕ 45. Это обеспечивает задание положения механизма тяги, соответствующее положению коаша на выбранной в пределах рабочей зоны транспортировки ковша. При этом в иачале транспортировки ковш из любой точки забоя перемещается к выбранной траектории и продолжает двигаться вдоль нее до положения разгрузки, что повышает надежность управления, поскольку исключается выход ковша за пределы рабочей зоны как в аварийную зону растяжки вблизи стрелы, так и в зону саморазгрузки, а также исключается столкновение ковща с близким к стреле отвалом, что также может привести к аварии. По мере приближения механизма к положению разгрузки импульсы, поступающие с импульсных датчиков перемещения механизмов поворота 31, подъема 32 и тяги 33, уменьшают коды чисел, записанных в реверсивных счетчиках импульсов поворота 16, подъема 17VL тяги 18, приближая их к нулю, при котором все механизмы останавливаются. Окончание транспортировки фиксируется первым логическим элементом И 41, на выходе которого при этом появляется сигнал после достил ения положения перед началом разгрузки как механизмом поворота, так и механизмом подъема (а также механизмом тяги, который в этом режиме следует за движением механизма подъема, удерживая ковш на выбранной траектории, проходящей точку положения ковша перед началом разгрузки). Выходной сигнал первого логического элемента И 41 поступает на первый вход первого триггера 48 и переключает его, п появляющийся при этом .на выходе последнего сигнал поступает на вход второго логического элемента И 42, на который поступает также сигнал с первого выхода второго триггера 49. Сигнал с выхода второго логического элемента И 42 поступает на вход усилителя с ограничением выходного напрял ения тяги 9 и обеспечивает движение механизма тяги в сторону увеличения длины тягового каната, приводящее к разгрузке ковща. При переключении первого триггера 48 его выходной сигнал поступает также на выход элемента задержки 50. По истечении времени задержки, .необходимой для разгрузки ковша, с выхода элемента задержки сигнал поступает на первый вход второго триггера 49, переключение которого приводит к исчезновению сигнала, поступившего с его пер.вого выхода на вход второго логического элемента И 42, а вместе с тем и сигнала, поступившего с выхода второго логического элемента И 42 на вход усилителя с ограничением выходного напряжения тяги 9. Механизм тяги возвращает ковш на выбранную траекторию его транспортировки. Одновременно при переключении второго триггера 49 сигнал поступает также на входы третьего 43 и четвертого 44 логических элементов И и на управляющий вход первой ключевой схемы поворота 19. С выхода третьего логического элемента И 43 сигнал поступает на вход усилителя с ограничением выходного напряжения подъема 8, обеспечивая движение механизма подъема в сторо.ну длины каната. Механиз.м тяги обеспечивает при этом движение вдоль выбранной траектории. Через первую ключевую схему поворота 9 с выхода регистра поворота 22 на вход
комбинационного сумматора поворота 13 поступает код числа, пропордионального расстоянию между положениями механизма поворота в забое и при разгрузке ковша. Это число вычитается из числа, код которого поступает на вход комбинационного счетчика поворота 13 с выхода реверсивного счетчика импульсов поворота 16, что приводит к появлению на входе системы управления механизмом поворота / сигнала, обеспечивающего движение этого механизма к забою с максимальной скоростью. Поскольку при этом в вертикальной плоскости осуществляется движение вдоль выбранной траектории, обеспечивается обход высокого и близкого к стреле отвала.
В момент выхода механизма поворота за пределы высокого и близкого к стреле отвала злак числа в дополнительном реверсивном счетчике 3.7 совпадает со знаком числа в регистре поворота 22, на выходе логического элемента равнозначности 40 появляется сигнал, который поступает на вход четвертого логического элемента И 44. Сигнал, появляющийся при этом на выходе четвертого логического элемента И 44, поступает .на входы первого и второго логических элементов НЕ 45 и 46 и на управляющие входы первых ключевых схем подъема 20 и 21 тяги. Исчезнов ение сигналов на входах первого 45 и второго 46 логических элементов НЕ закрывает дополнительный управляемый ключ 58 и приводит к исчезновению сигнала, поступивщего с выхода третьего логического элемента И 43 на вход усилителя с ограничением выходного .напряжения по.дъема 8. Одновременно открываются первые ключевые схемы подъема 20 и тяги 21, через которые с выходов регистров подъема 23 и тяги 24 на входы комбинационных сумматоров подъема М и тяги 15 поступают коды чисел, соответствующих положению указанных механизмов, соответствующих положению ковща в забое перед началом копания. В комбинационных сумматорах подъема 14 и тяги 15 осуществляется вычитание кодов чисел, поступающих с выходов реверсивного счетчика импульсо.в 17 и регистра 23 подъема, реверсивного счетчика импульсов 18 и регистра 24 тяги, благодаря чему на входы систем управления механизмами подъема 2 и тяги 3 поступают сигналы, обеспечивающие перемещение этих механизмов в положение, соответствующее положению ковща в забое перед началом копания.
Положению ковща в забое перед началом копания соответствуют нулевые коды чисел в комбинационных сумматорах поворота 13, подъема 14 и тяги 15, а следовательно, и нулевые сигналы на входах систем управления механизмами .поворота /, подъема 2 и тяги 3, вследствие чего эти механизмы останавливаются.
Таким образом обеспечивается автоматическое выполнение этапов транспортировки ковща из забоя к отвалу, разгрузка ковща и его возвращение в забой. Введение в устройство импульсных датчиков перемещения командоаппаратов поворота 34, подъема 35 и тяги 36 позволяет изменять коды чисел в реверсивных счетчиках импульсов поворота 16, подъема 17 и тяги IS, что обеспечивает возможность непосредственно в процессе работы корректировать траекторию ковща в .положение ,в забое и у отвала, если возникает такая необходимость вследствие изменения технологически условий работы. Однако по сравнении; с полностью ручным управлением задача мащиниста при этом существенно упрощается. В значительной части рабочих циклов транспортировка и разгрузка ковща можег быть осуществлена в полностью автоматическом режиме, исключающем возможность возникновения аварийных режимов растяжки, саморагрузки и столкновения с близким к стреле отвалом, что увеличивает надежность управления и обеспечивает транспортировку ковща с максимальными скоростями, в том числе и в сложных условиях работы (при плохой видимости и близком к стреле отвале), что способствует повыщению производительности.
Необходимость введения в части циклов корректирующего воздействия, не уменьщая указанной выще возможности получения максимальной производительности, существенно уменьшает возможность нарущения выполняемого реж-има вследствие .грубых ошибок при управлении, определяемых усталостью или недостаточной квалификацией машиниста, поскольку возможная и требуемая величина корректирующего воздействия существенно меньще возможного и требуемого диапазона воздействия на механизм при полностью ручном управлении. В то же время обеспечение возможности такой коррекции позволяет оперативно реагировать на изменение условий работы, изменять разрабатываемый участок забоя и место разгрузки ковща, его траекторию, что расширяет функциональные возможности устройства. Кроме того, в случае необходимости воздействием на ключ режима 54 машинист может на любом этапе движения перейти на ручное управление. Если в процессе длительной работы технологические условия существенно изменяются, устройство может быть легко переналажено в течение одного рабочего цикла описанным выше способом путем последовательного воздействия на ключи наладки 51-55 при перемещении механизма от места разгрузки ковща к забою, а изменением коэффициента усиления усилителя 59 можно в любой момент изменить положение выбираемой траектории ковша.
Таким образом, устройство позволяет повысить точность и надежность управления, обеспечивая согласованное движение мехализмов поворота, -подъема и тяги в режимах транспортировки ковша по выбранной траектории в рабочей зоне к месту разгрузки и к забою и при его разгрузке, исключает возможность нарушения рабочего цикла и возникновение аварийных ситуаций вследствие выхода ковша за пределы рабочей зоны, обеспечивая обход близкого к стреле отвала или другого препятствия при повороте драглайна, а обеспечиваемое при этом выполнение транспортировки с максимальными скоростями механизмов, в том числе я в сложных условиях работы (при плохой видимости и близком к стреле отвале), позволяет повысить производительность драглайна. При этом упрощается работа машиниста, уменьшается его утомляемость, что также способствует повышению производительности машины.
В то же время, хотя указанные режимы с помошью этого устройства выполняются автоматически, машинист имеет возможность в любой момент внести необходимую коррекцию, если это требуется вследствие изменения технологических условий работы, с помошью тех же командоалпаратов, которые используются при ручном управлении, т. е. машинист остается «хозяином процесса, улучшается его психологическое состояние, а это также способствует повышению Производительности машины. Достижению поставленной цели способствует также простота переналадки устройства и возможность ее осуществления за время одного этапа перемещения механизмов от положения разгрузки к забою, что упрощает также эксплуатацию устройства.
Формула изобретения
Устройство для управлений драглайном, содержащее три системы управления механизмами поворота, подъема и тяги с командоаппаратами, отличающееся тем, что, с целью повышения производительности экскаватора за счет .повышения точности и надежности управления, о.но снабжено логическими элементами равнозначности, четырьмя логическими элементами И, тремя логическими элементами НЕ, двумя триггерами, элементом задержки, тремя ключами наладки, ключом режима, управляемым ключом, усилителем с регулируемым коэффициентом усиления, реверсивным счетчико:М импульсов и тремя подключенными ко входам схем }правления механизмами поворота, подъема и тяги цифро-аналоговыми схемами соответственно поворота, подъема и тяги, из которых включает соединенные последовательно управляемый ключ, усилитель с
огранителем выходного напряжения, преобразователь код - напряжение, комбинационный сумматор, лервую ключевую схему, регистр, вторую ключевую схему, соединенный с комбинационным сумматором реверсивный счетчик импульсов, синхронизатор импульсов и подключенные к двум входам последнего датчик перемешения командоанпарата и имлульсный датчик перемещения соответствующего механизма поворота, подъема или тяги, при этом выход датчика перемещения механизма поворота подключен к входу реверсивного счетчика импульсов, к второму входу которого
подключен один из ключей наладки, а выход его соединен с одним из входов логического элемента равнозначности, к второму входу которого подключен выход регистра цифро-аналоговой схемы поворота, а выход логического элемента равнозначности через последовательно соединенные первый логический элемент И, логический элемент НЕ и второй логический элемент И подключен к усилителю с ограничением выходного напряжения цифро-аналоговой схемы подъема, к одному из входов второго логического элемента И и подключен один из выходов первого триггера, второй выход которого соединен с подключенным к усилителю с ограничением входного напряжения цифро-аналоговой схемы тяги третьему элементу И, к второму входу которого подключен выход второго триггера, соединенный через элемент задержки с входом
первого триггера, к второму входу которого и к одному из входов второго триггера через второй элемент НЕ подключен соединенный с заправляемыми ключами цифроаналоговых схем поворота, подъема и тяги
ключ режима, к второму входу второго триггера подключена четвертая схема И, к входам которой подключены счетчики импульсов цифро-аналоговых схем поворота и подъема, ко входам уставки нуля счетчиков импульсов цифро-аналоговых схем поворота, подъема и тяги подключен второй ключ наладки, а третий ключ наладки подключен к управляющим входам вторых ключевых схем цифро-аналоговых схем поворота, подъема и тяги, причем входы первых ключевых схем цифро-аналоговых схем подъема и тяги и выход первого логического элемента И через третий элемент НЕ соединен с одним из входов удравляющего ключа, К второму входу которого подключен выход преобразователя код - напряжение дифро-аналоговой схемы лодъема, а выход управляемого ключа через усилитель с регулируемым коэффициентом усиления подключен к входу усилителя с ограничением выходного напряжения цифро-аналоговой схемы тяги, а к входу ключевой схемы цифро-аналоговой схемы поворота подключены выходы первого триггера и выход первого элемента И.
13
Источники информации, принятые во внимание при экспертизе:
1. Залесов О. А. и др. Применение элек14
тронных моделей для исследования горных машин. М., «Недра, 1966, с. 309-320. 2. Патент США .Vg 3.460.278, кл. 37-116, 1969 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматизированного управления транспортными перемещениями ковша экскаватора-драглайна | 1989 |
|
SU1788163A1 |
| Устройство для программного регулирования | 1981 |
|
SU1016772A1 |
| Устройство для учета работы транспортного оборудования | 1981 |
|
SU1059072A1 |
| Устройство формирования много-СТупЕНчАТОгО КВАзиСиНуСОидАльНОгОТРЕХфАзНОгО НАпРяжЕНия | 1978 |
|
SU809437A1 |
| Устройство противобоксовочной защиты локомотива | 1981 |
|
SU1004163A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ РАЗЛИВКИ СТАЛИ | 1973 |
|
SU364387A1 |
| Устройство для автоматического учета выработки экскаватора | 1974 |
|
SU600264A1 |
| Аналого-цифровое устройство для управления токарным станком | 1980 |
|
SU947830A1 |
| Устройство для исследования электрохимических процессов | 1988 |
|
SU1589187A1 |
| Устройство для контроля работы машины циклического действия, например, шагающего эскаватора | 1968 |
|
SU307672A1 |
п
wa.f
