(54) ПРЕОБРАЗОВАТЕЛЬ МЕХАНИЧЕСКИХ УСИЛИЙ В ЭЛЕКТРИЧЕСКИЙ СИГНАЛ
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь механических усилий в электрический сигнал | 1975 |
|
SU606117A1 |
| Преобразователь механических усилий в электрический сигнал | 1977 |
|
SU640151A2 |
| Магнитоупругий датчик усилий | 1982 |
|
SU1049760A1 |
| СПОСОБ ЩУРОВА ИЗМЕРЕНИЯ МАГНИТНОЙ ЭМИССИИ | 2007 |
|
RU2346287C1 |
| Способ измерения сложных механических деформаций с помощью аморфной металлической ленты и устройство для калибровки чувствительного элемента | 2018 |
|
RU2708695C1 |
| Способ контроля механических напряжений в стальных конструкциях магнитоупругим методом | 2021 |
|
RU2764001C1 |
| Магнитоанизотропный датчик для измерения силы или деформации | 1974 |
|
SU561879A1 |
| Линия задержки | 1981 |
|
SU1048566A1 |
| Функциональный преобразователь силы | 1978 |
|
SU787915A1 |
| Силоизмерительный датчик | 1979 |
|
SU1004780A1 |

t
Изофетение относится к преобразова,тепям механических усилий в эпектрический сигнал и может найти применение во многих областях, в частности для измерения осевой нагрузки на цолото непосред- ственно в процессе бурения.
Известен преобразователь механических усилий в электрический сигнал по авт. св. № 6О6117, содержащий воабуждаюшую систему на постоянных магнитах, силопередаюший элемент, измеритель индукции магнитного поля и магнитоупругий чувствительный злеменТ) выполненный в виде четного числа стержней, расположенных симметрично относительно иак«ерит&ля индукгган магнитного поля н мвхаявчес- ки соединенных с чередующимися разноименными полюсами постоянных магнитов возбуждающей системы til.
Этот преобразователь обладает целым рядом aocToiracTB в случае применения, например, для определения динамических нагрузок в колонне бурильных труб или в качестве датчика осевой нагрузки на до-
ffoTo бурового инструмента, но имеет существенный недостаток, а именно в случае проходки наклонно-«аправленных скважин становится существенным влияние изгибающих нагрузок.
Целью изобретения является повышевве точности путем уменьщения влияния изгибов.
Это достигается тем, что в предлагаемэм преобразователе стержни, расположенные симметрично относитега но измерителя магнитной индукции, выполнены нз материалов с противоположными знаками магнитострикции, а сил опере дающий элемент механически соединен с парами стержней разного знака магниФострикдии.
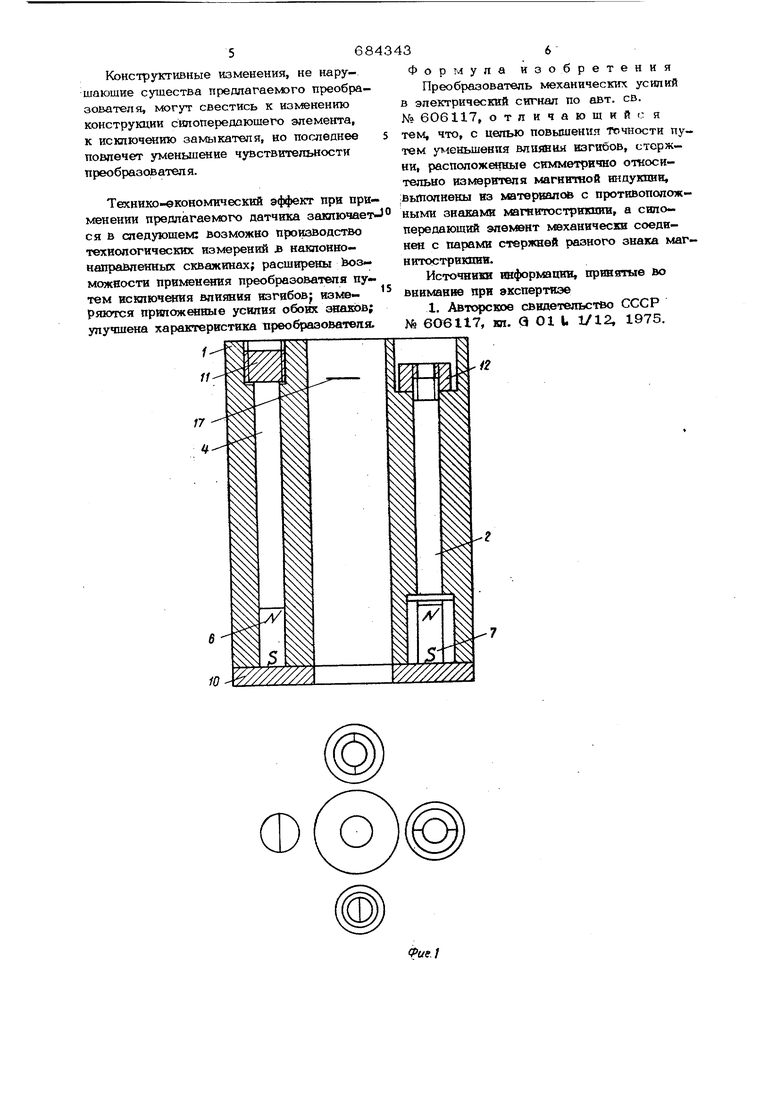
На фиг. 1 представлена принципиальная схема описываемого преобразователя; на фиг. 2 - магнитное поле в зоне расположения измерителя индукции магнитного поля.
в каналах силопередающего элемента 1 преобразователя, изготовленного из немагнитного материала, расположены стерж36843ни 2-5 магнитоупругого чувствительного элемента, причем стержни 2,3 изготовлены из материала, обладающего отрицательной магнитострикцией (например альфера). Стержни 2, 4 являются рабочими, а стерж- ни 3, 5 - компенсационными. Под всеми стержнями расположены маг ниты 6-9 Возбуждающей системы, опирающиеся на аамыкатепь 10, изготовленный из феррокшгнитного материала. Магниты распопожетиы на замыкателе, чередуясь разноименными полюсами, поэтому при огсутствии внешних нагрузок магнитные потоки О, Ъ., С, d (фиг. 2) равны, а их конфигурация такова, что в центре магнитной системы по ее оси рез5тштирующий вектор индукции магнитного поля равен нулю. Элемент, передающий внешнюю нагрузку на стержень 4, вьтолнен в виде И. Он создает в стержне предваритель- ное сжимающее напряжение. Элемент, пере дающий нагрузку на стержень 2, выполнен в виде гайки 12. Он создает в стержне предварительное растягивающее усилие. Компенсационные стержни 3, 5 помещены в гильзы 13, 14 таким образом, что внеш ние нагрузки на них не действуют. Предваритепьаое напряжение в компенсационных стержнях создается с помощью винта 15 и гайка 16. В центре преобразователя по его оси расположен измеритель индукшга 17 магнитного поля, в частности, им может быть кэяьцевой феррозондовый магнитотуютр. Он размещен в контейнере (на схеме не показан), в котором может быть также часть электронной схемы. Ось чув- ст&итеяьности магнитометра лежит в плескости, проходящей через рабочие стержни. Приншт работы преобразователя заключается в следующем. Во.Всех стержнях 2-5 с помощью винтов 11, 15 и гаек 12, 16 создают пред, верительные напряжения в пределах середины линейных участков характеристик магнитострикште применяемых материалов, причем величины предварительных напряжений определяют диапазон измеряемой преобразователем нагрузки. Характер нагрузки предварительньгх напряжений зависит от знака магнитострикшга материала: для материалов с отрицательной магнитострикцией нагрузка должна быть растягивающей, для материалов с положительной магнитострикцией - сжи- 55 мающей. Выходной сигнал магнитометра при отсутствии внешней нагрузки на преобразователь, в случае сбалансированных магнитных потоков, равен нулю. Балансировку магнитных потоков производят теми же элементами II, 12, 15, 16, которыми создают предварительное напряжение. При нагружении преобразователя сжимающими или растягивающими нагрузками происходит нарушение баланса магнитных потоков за счет изменения магнитной проницаемости рабочих стержней магнитоупругого чувствительного элемента. Характер изменений магнитных потоков а , Ъ, с , d показан на фиг. 2. В результате, в центре магнитной сие- темы магнитная индукция не равна нулю, в выходной обмотке магнитометра появляется сигнал, пропорциональный приложенной нагрузке, фаза которого соответствует характеру приложенной нагрузки сжатие или растяжение. Метод компенсации внешнего магнитного поля определяется условиями работы устройства и может осуществляться, например, путем Выставления уровня нулевого сигнала магнитометра предварительным нагруж«1ием магнитоупруггос стерж;Ней или установкой магнитных экранов. Можно не .проводить компенсацию, а просто учитывать величину внешнего магнитного поля по показанию дополнительного магнитометра. Преобразователь обладает существенными достоинствами, позволякшими использовать его для измерения осевой нагрузки на долото в случае проходки наклон- но-напраВленных скважин, так как преоб- . разователь нечувствителен к изгибам. Это о ясняется тем, что рабочие стержни расположены попарно симметрично относительно измерителя магнитной индукции, и при воздействии на корпус изгибающих усилий в стержнях возникают дополнительные напряжения, противоположные по характеру, а так как стержни изготовлены из материала с разными знаками магнитЬстрикции, то изменение соотношения величин магнитных потоков не происходит. Кроме того, применение для изготовления магнитоупрутих стержней материалов с разными знаками магнито- стрикции позволило получить характеристику преобразователя более линейную по электрическому сигналу и уменьшить механический гистерезис Выбранная ориентация намагничивания рабочих и компенсационных стержней позволяет корректировать температурную погрешность. Конструктивные изменения, не нарушающие сутдества предлагаемэго преобразователя, могут свестись к изменению конструкции сипопередаюшего элемента, к исключению замыкателя, во последнее повлечет уменьшение чувствительности преобразователя. Технико-економический эффект при применении предлагаемого датчика заключается а сэтедующем: возможно производство технологических измерений наклоннонаправленных скважинах; расширены Ьоз- можвости применения преобразователя путем исключения влияния изгибов измеряются приложенные усилия обоих зважов; улучшена характеристика преобразователя.
передающий элемент механически соединен с парами стержней разного знака магнитострикпии.
Источники информации, принятые ьо внимание при экспертизе
I. Авторское свидетельство СССР № 606 It7, ют. 9 01 I. V12, 1975. Формула изобретения Преобразователь механических усилий в электрический сигнал по авт. св. № 606117, отличающий : я тем, что, с целью повышения точности путем у еньшення влияния изгибов, стержни, расположенные симметрично относительно измерителя магнипной инаукцви, выполнены вз материалов с противоположными знаками магнитострикшга, а сило-
Ill17 Ч12
V.
W //y7//.
Ю
л/
У////////Л
