1
Изобретение относится к технике подъемно-транспортного оборудования и может быть использовано для подачи сигнала в схему аварийной защиты в приводах эскалаторов и лестничных полотен.
В настоящее время для контроля скорости используются устройства, содержащие узел вязкого трения, поворотная часть которого снабжена рычагом, взаимодействующим с контактами fl .
Наиболее близким по технической сущности к изобретению является устройство 2}, содержащее электрическую машину, ротор которой связан с контролируемьпл валом, а статор выполнен поворотным и снабжен рычагом, взаимодействующим с исполнительным механизмом, выполненным в виде индуктивного датчика скорости. Это устройство позволяет определить самопрои.эвольное реверсирование вала.
Недостаток этого устройства заключается в том, что оно не обеспечивает точного контроля скорости вала.
Целью настоящего изобретения является повышение точности контроля скорости.
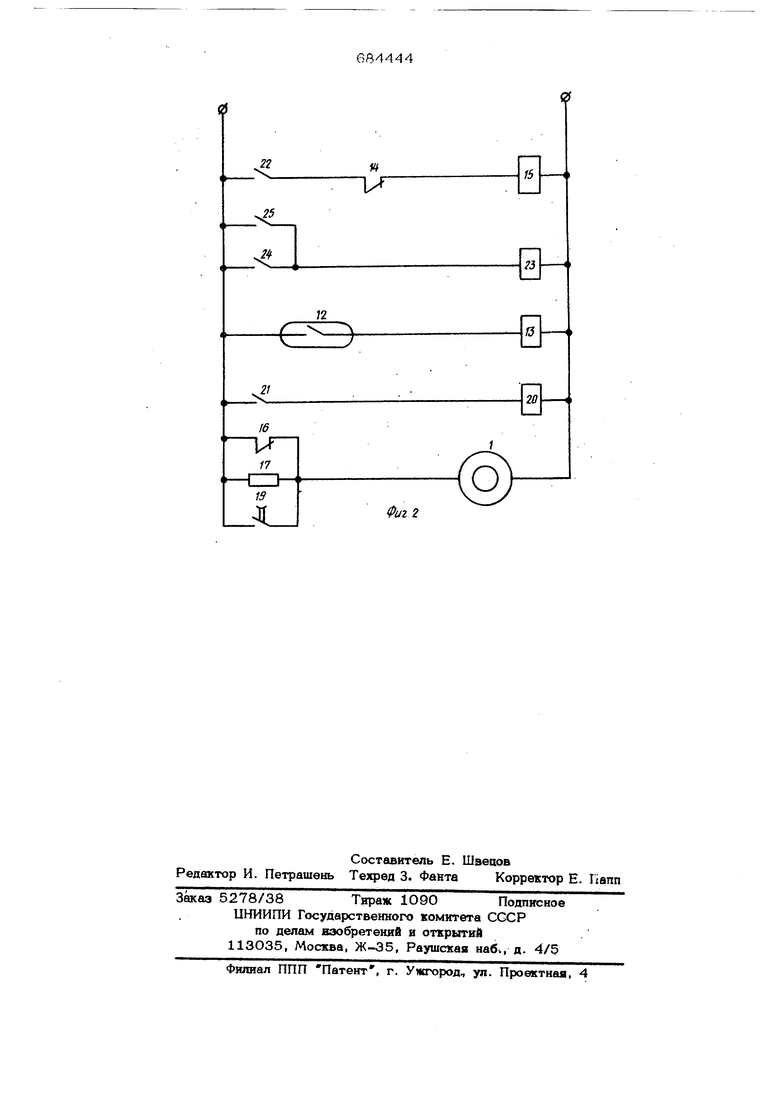
Поставленная цель достигается тем, что в цепь возбуждения электр1гческой машины последовательно включён балластный резистор, зашунтированный нормально разомкнутыми контактами реле времени.
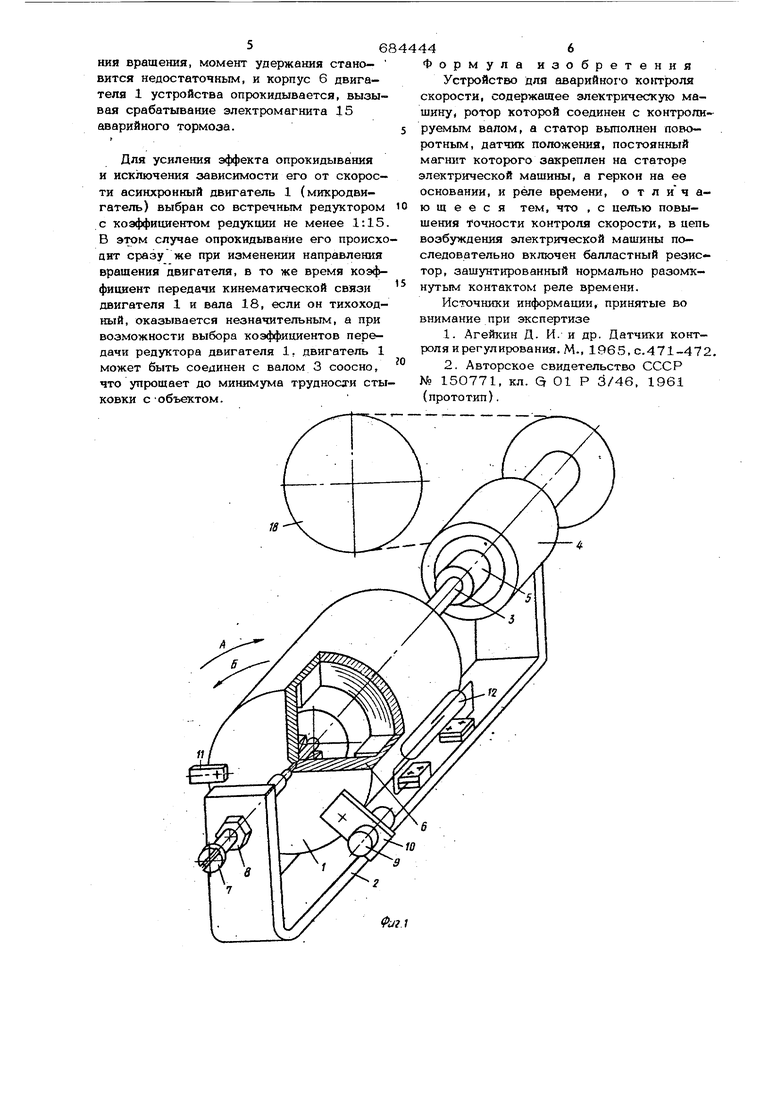
Сущность заявляемого изобретения поясняется чертежами, где на фиг. 1 изображен вид устройства в аксонометрии, на фиг. 2 - принципиальная электрическая схема устройства.
Предложенное устройство представляет собой редукторный асинхронный двигатель 1, подвешенный в двух точках на основании 2. Со стороны вала 3 подвеска осуществлена с помощью дополнительного узла 4, ось 5 которого соедиЯена жестко с валом 3, а со стороны корпуса 6 подвеска осуществляется с помощью винта 7, со стопорной гайкой 8, конец которого выполнен под штифт и заходит в спе- циально просверленное углублеине в корпусе 6 без упора в его дно. Благодаря этому обеспечивается свобошпый разворот корпуса 6 вокруг оси подвески под действием якоря 9 (явл5;(ющегося постоянным магнитом), который закреплен на рычаге 10 и является одновременно противовесом, воз вращаюшимрычаг 10, (а следовательно и корпус 6, в котором рычаг 1О установлен) из горизонтального (рабочего) положения до упора рычага 10 в основание 2. Поворот корпуса 6 в противоположном направлении ограничивается упором 11. Соосно с 5псорем 9 установлен геркон 12 закрепленный на основании 2 и включенный в цепь реле 13 аварийного включония, контакты 14 которого включены в цепь электромагнита 15 аварийного тормоза , а контакты 16 шунтируют балластный резистор 17, предназначенный для ограничения тока двигателя до величины, обес печивающей длительную работу двигателя в режиме противовключения. Кроме того, для надлежащего контроля характера вращения контролируемого вала 18 служат нормально разомкнутые контакты 19 реле времени 20, включаемого контактом 21 общей схемы управления валом 18, и замыкающие контакты 22 промежуточного реле 23 с блокирующими контактами 24, включаемого контактами 25 реле 13 аварийного включения. Устройство работает следующим образом. При подаче натяжения на схему авари ного торможения на двигатель 1 подаетс номинальное напряжение источника питания. Пока контролируемый вал неподвиже ротор двигателя 1 не вращается (так как связь его с объектом жесткая), а поворачивается статор, вместе с корпусом 6 двигателя 1 в направлении Б (фиг. 1), преодолевая момент, со.эдаваемыЙ весом якоре 9 и рычага 1О. Якорь 9 поворачн,ваетсй с корпусом 6 на угол, ограничив&&лый упором 11, и входит во взаимодействие с герконом 12.. Под воздействием поля якоря 9 конта геркона 12 замыкается и включает реле 13. Его контакты 16, размыкаясь, вводят в сепь питания двигателя 1 балластный резистор 17, ограничивая момент двигателя 1 до значения, достаточного ДЛ8 удержания якоря 9 в положении срабатывания геркона 12. Контакты 14 раз рывают цепь включения электромагнита 15, а контакты 25 замьпсают цепь питания реле 23. Реле 23 включается, блокируется контактами 24 и, замыкая контакты 22 в цепи электромагнита 15, подготавливает его к включению в случае аварийного состояния вала 18. При включении на спуск эскалатора, . для которого, в частности, предусмотрено это устройство, замьпсается контакт 21 в цепи реле 2О. Реле 20 включается н шунт1фуется балластньгй резистор 17. На двигатель 1 подается номинальное напряжение. Поскольку ротор жестко связан с контролируемым валом, то его скорость вращения определяется скоростью вращения вала 18 и при ее номинальном значении будет несколько ниже синхронной скорости вращения ротора двигателя (на величину минимального запаса), что позволяет избежать ложных срабатываний устройства. При поаьпиении скорости вала 18 по какой-либо причине вьпие установленного предела скор.,сть вращения ротора двигателя 1 повышается до синхронной, момент, приложенный к статору становится равным нулю, и корпус 6 двигателя 1 под действием момента, создаваемого весом якоря 9 и рычага 1О, поворачивается в направлении А, отводя якорь 9 от геркона 12. Этот процесс ускоряется при увеличении скорости вращения ротора под воздегйст- вием вращения вала 18 выше синхронной, так как двигатель 1 переходит в генераторный режим, а к его статору прикладывается момент, который ускоряет поворот корпуса 6 и, следовательно, размыкание геркона 12. Реле 13 отключается, и его контакт 14 включает электромагнит 15 аварийного тормоза. В указанной на фиг. 1 конструкции контроль самопроизвольного реверсирования вала 18 осуществляется в направлении А, т. е. когда под действием активной нагрузки на валу18 (пассажиры на лестничном полотне) происходит измене- ние направления его движения, вызывающее аварийную ситуацию. Пои включении эскалатора на подъем, двигатель 1 устройства получает питание через балластный резистор 17, как и в состоянии покоя, достаточное только для удержания корпуса 6 от опрокидывания. В этом случае двигатель 1 работает в режиме противовключения. При уменьшешш скорости вращения вала 18 до нуля и изменении направлеНИИ вращения, момент удержания становится недостаточным, и корпус 6 двигателя 1 устройства опрюкидывается, вызывая срабатывание электромагнита 15 аварийного тормоза. Для усиления эффекта опрокидывания и исключения зависимости его от скорости асинхронный двигатель 1 (микродвигатель) выбран со встречным редуктором с коэффициентом редукции не менее 1:15 В этом случае опрокидывание его происхо дит сразу же при изменении направления вращения двигателя, в то же время коэффициент передачи кинематической связи двигателя 1 и вала 18, если он тихоходный, оказывается незначительным, а при возможности выбора коэффициентов передачи редуктора двигателя 1, двигатель 1 может быть соединен с валом 3 соосно, что упрощает до минимума трудности сты ковки с Объектом.
Формула изобретения Устройство для аварийного контроля скорости, содержащее электрическую машину, ротор которой соединен с контролируемьп, валом, а статор вьшолнен поворотным, датчик положения, постоянный магнит которого закреплен на статоре электрической машины, а геркон на ее основании, и реле времени, о т л и ч аю щ е е с я тем, что , с целью повышения точности контроля скорости, в цепь возбуждения электрической машины последовательно включен балластный резистор, зашунтированный нормально разомкнутым контактом реле времени. Источники информации, принятые во внимание при экспертизе 1.Агейкин Д. И. и др. Датчики контроля и регулирования. М., 1965, с.471-472. 2.Авторское свидетельство СССР № 150771, кл. Q О1 Р 3/46, 1961 (прототип).
22
« 1/f
Г5
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКИЙ (ГИДРАВЛИЧЕСКИЙ) СЛЕДЯЩИЙ ПРИВОД, СТРУЙНЫЙ ДВИГАТЕЛЬ, РАСПРЕДЕЛИТЕЛЬ И БЛОК КОНЕЧНЫХ ВЫКЛЮЧАТЕЛЕЙ | 1995 |
|
RU2093715C1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ СИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ ОТ АВАРИЙНЫХ РЕЖИМОВ РАБОТЫ | 2004 |
|
RU2285993C2 |
| Электропривод трубопроводной запорной арматуры с устройством для защиты электродвигателя от аварийного режима | 1989 |
|
SU1661903A1 |
| Устройство для тепловой защиты электрической машины | 1985 |
|
SU1399849A1 |
| Устройство для регулирования загрузки сыпучего материала в дробилку | 1978 |
|
SU771624A1 |
| УСТРОЙСТВО ЗАЩИТЫ СИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ ОТ АВАРИЙНЫХ РЕЖИМОВ РАБОТЫ | 2004 |
|
RU2286638C2 |
| Устройство для температурной защиты электродвигателя | 1982 |
|
SU1120444A1 |
| ПНЕВМАТИЧЕСКИЙ (ГИДРАВЛИЧЕСКИЙ) СЛЕДЯЩИЙ ПРИВОД, БЛОК КОНЕЧНЫХ ВЫКЛЮЧАТЕЛЕЙ, ПРЕОБРАЗОВАТЕЛЬ ВРАЩЕНИЯ И РАСПРЕДЕЛИТЕЛЬ ДЛЯ ПНЕВМАТИЧЕСКОГО (ГИДРАВЛИЧЕСКОГО) СЛЕДЯЩЕГО ПРИВОДА | 1995 |
|
RU2087752C1 |
| ЭЛЕКТРОПРИВОД | 2005 |
|
RU2277747C1 |
J
2
21
;j
€b
2/7
Фиг 2
