1
Изобретение относится к области радиотехники и может быть использовано в радионавигации, радиолокации и телемеханике для измерения интервалов времени между импульсами.
Известны измерители временных интервалов, выполненные на основе способа квантования измеряемого интервала импульсами опорного генератора |l}.
Основной недостаток подобного вида измерителей - большая ошибка измерений при наличии отклонения частоты опорного генератора относительно номинальной..
Известен измеритель временных интервалов между импульсными сигналами, содержащий опорный генератор, стартстопную схему, счетчик импульсов., корректор, и две следящие системы с астатизмом второго порядка, включающие интеграторы скорости, выходы одного из которых соединены с информационными входами корректора, стробовые выхооы следящих систем соединены с входами старт-стонной схемы, а опорный генера-
тор соединен с входами следящих систем и старт-стопной схемы 2J.
Основной недостаток этого измерителя - низкое быстродействие, поскольку коррекция осуществляется в момент прохождения сигналов высокой частоты через старт-стопную схему и производится с помощью высокочастотной схемы, которая добавляет или исключает определенное число импульсов в периодическую последовательность сигналов опорной частоты, поступающих на счетчик.
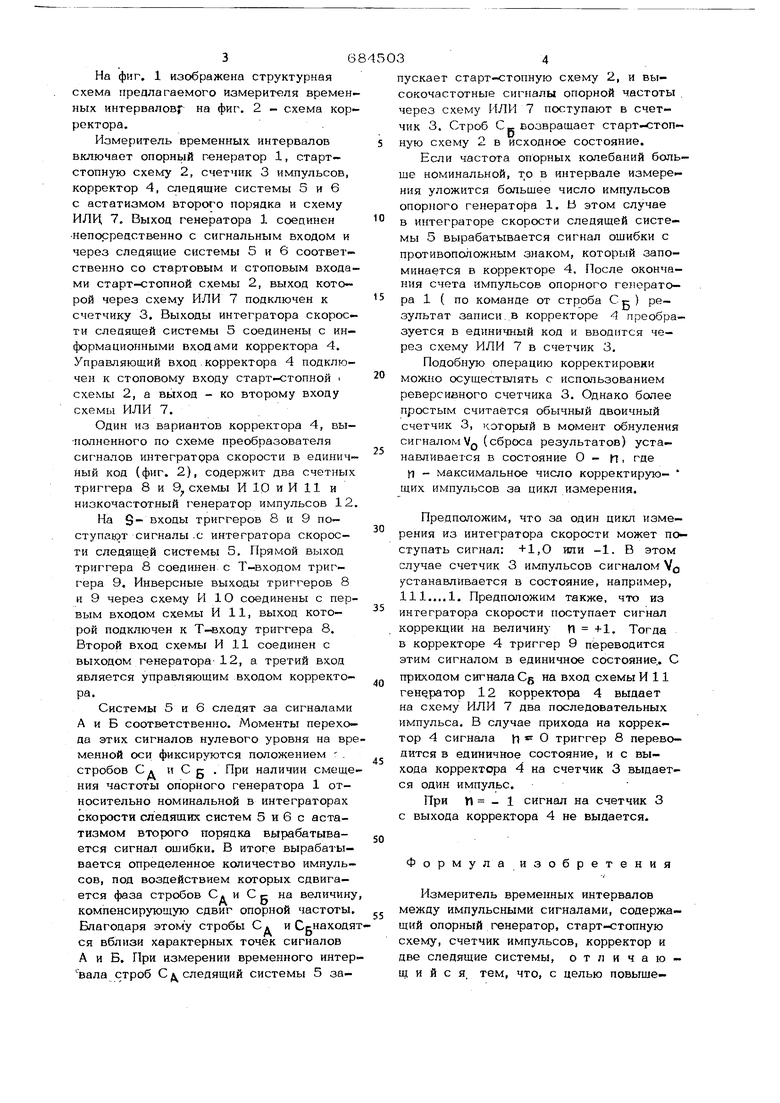
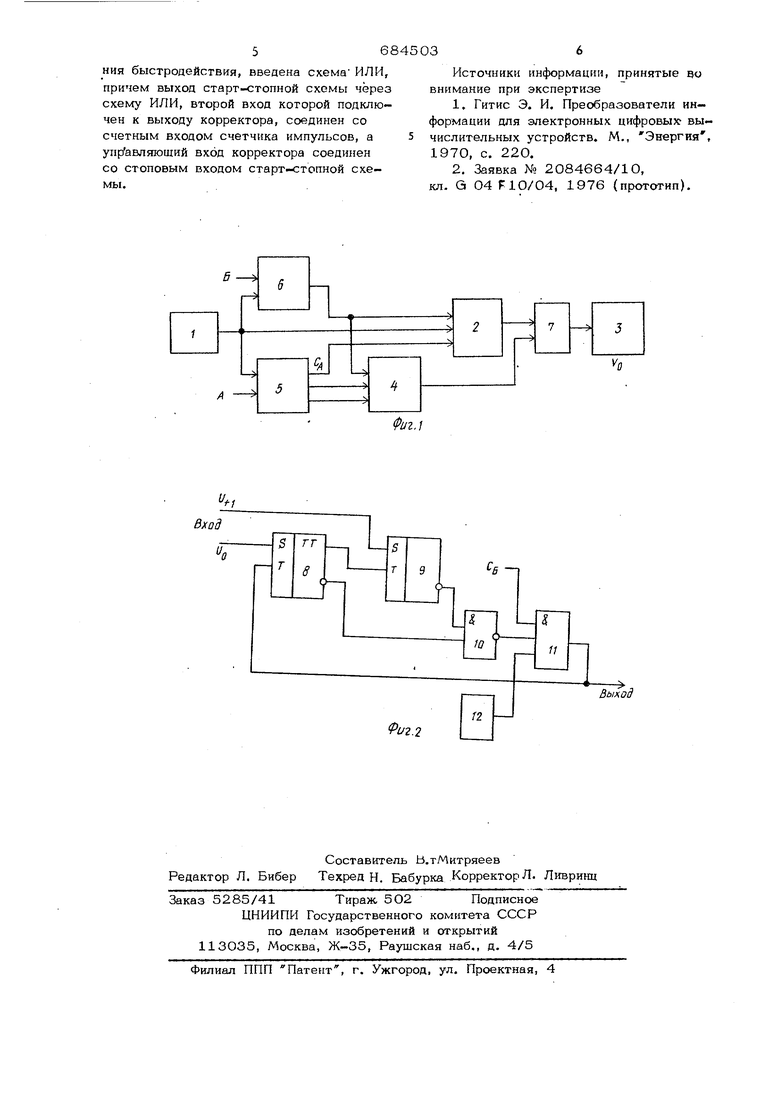
Целью изобретения является повышение быстродействия. Для этого корректор выполнен по схеме преобразователя сигналов Интегратора скорости в единичный код и дополнительно введена схема ИЛИ, причем выход старт-стопной схемы через схему ИЛИ, второй вход которой подключен к выходу корректора, соединен со счетным входом счетчика импульсов, а управляющий вход корректора соединен со стоповым входом старт-стопной схемы. На фиг. 1 изображена структурная схема предлагаемого измерителя временных интервалов на фиг. 2 - схема корректора. Измеритель временных интервалов включает опорный генератор 1, стартстопную схему 2, счетчик 3 импульсов, корректор 4, следящие системы 5 и 6 с астатизмом второго порядка и схему ИЛИ, 7. Выход генератора 1 соединен непосредственно с сигнальным входом и через следящие системы 5 и 6 соответственно со стартовым и стоповым входами старт-стопной схемы 2, выход которой через схему ИЛИ 7 подключен к счетчику 3, Выходы интегратора скорости следящей системы 5 соединены с информационными входами корректора 4. Управляющий вход корректора 4 подключен к стоповому входу старт-стопной схемы 2, а выход - ко второму входу схемы ИЛИ 7. Один из вариантов корректора 4, вы- полненного по схеме преобразователя сигналов интегратора скорости в единичный код (фиг. 2), содержит два счетных триггера 8 и 9., схемы И 10 и И 11 и низкочастотный генератор импульсов 12 На триггеров 8 и 9 поступают сигналы .с интегратора скорости следящей системы 5. Прямой выход триггера 8 соединен с Т-входом триггера 9, Инверсные выходы триггеров 8 и 9 через схему И 1О соединены с первым входом схемы И 11, выход которой подключен к Т-входу триггера 8. Второй вход схемы И 11 соединен с выходом генератора-12, а третий вход является управляющим входом корректора. Системы 5 и 6 следят за сигналами А и Б соответственно. Моменты перехода этих сигналов нулевого уровня на вре менной оси фиксируются положением стробов Сд и С g . При наличии смеще ния частоты опорного генератора 1 относительно номинальной в интеграторах скорости следящих систем 5 и б с астатизмом второго порядка вырабатывается сигнал ошибки. В итоге вырабатывается определенное количество импульсов, под воздействием которых сдвигается фаза стробов С. и С g на величину компенсирующую сдвиг опорной частоты. Еэлагодаря этому стробы С. и Сснаходя ся вблизи характерных точек сигналов А и Б. При измерении временного интер вала строб С 1 следящий системы 5 запускает старт-стопную схему 2, и высокочастотные сигналы опорной частоты через схему ИЛИ 7 поступают в счетчик 3. Строб С возвращает старт-стопную схему 2 в исходное состояние. Если частота опорных колебаний больше номинальной, то в интервале измерения уложится большее число импульсов опорного генератора 1. В этом случае в интеграторе скорости следящей системы 5 вырабатывается сигнал ошибки с противоположным знаком, который запоминается в корректоре 4, После окончания счета импульсов опорного генератора 1 ( по команде от строба Cg ) результат записи..в корректоре 4 преобразуется в единичный код и вводится через схему ИЛИ 7 в счетчик 3. Подобную операцию корректировки можно осуществлять с использованием реверсивного счетчика 3. Однако бопее простым считается обычный двоичный счетчик 3, 11оторый в момент обнуления сигналомVQ (сброса результатов) устанавливается в состояние О - п, где И - максимальное число корректирую- щих импульсов за цикл измерения. Предположим, что за один цикл измерения из интегратора скорости может поступать сигнал: +1,О или -1. В этом случае счетчик 3 импульсов сигналом VQ останавливается в состояние, например, 111..,.. Предположим также, что из интегратора скорости поступает сигнал коррекции на величину П +1. Тогда в корректоре 4 триггер 9 переводится этим сигналом в единичное состояние.. С приходом сигнала Сд на вход схемы И 11 генератор 12 корректора 4 выдает на схему ИЛИ 7 два последовательных импульса. В случае прихода на корректор 4 сигнала f О триггер 8 переводится в единичное состояние, и с выхода корректора 4 на счетчик 3 выдается один импульс. При и 1 сигнал на счетчик 3 с выхода корректора 4 не выдается. Формула изобретения Измеритель временных интервалов между импульсными сигналами, содержащий опорный генератор, старт- ;топную схему, счетчик импульсов, корректор и две следящие системы, отличающийся, тем, что, с целью повышения быстродействия, введена схема ИЛИ, причем выход старт-стопной схемы через схему ИЛИ, второй вход которой подключен к выходу корректора, соединен со счетным входом счетчика импульсов, а управляющий вход корректора соединен со стоповым входом старт-стопной схемы.
Источники информации, принятые во внимание при экспертизе
1,Гитис Э. И. Преобразователи информации для электронных цифровых вычислительных устройств. М., Энергия, 1970, с. 220.
2.Заявка № 2084664/10,
кл. Q 04F10/04, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Измеритель временных интервалов | 1974 |
|
SU546845A1 |
| Измеритель временных интервалов | 1985 |
|
SU1307444A1 |
| "Устройство для измерения параметров сигналов | 1973 |
|
SU489048A1 |
| ИНТЕРПОЛЯТОР ПРЯМОГО КОДИРОВАНИЯ ДЛЯ ИЗМЕРЕНИЯ ИНТЕРВАЛОВ ВРЕМЕНИ | 2011 |
|
RU2467371C1 |
| Измеритель высоты нижней границы облаков | 1981 |
|
SU995049A1 |
| Устройство для воспроизведения цифровой магнитной записи в стартстопном режиме | 1985 |
|
SU1283834A1 |
| Измеритель временных интервалов | 1974 |
|
SU516999A1 |
| ГЕНЕРАТОР КОДА МОРЗЕВ П Т БAf(f3« fv^-^jr-i'i •;••-•.•«(.«Фип,1>& ;Г-''--'-':^'-'HI | 1971 |
|
SU430364A1 |
| Способ однодорожечной старт-стопной магнитной записи-воспроизведения | 1984 |
|
SU1278940A1 |
| Устройство для регулирования интенсивности потока выводимых частиц при медленном выводе пучка из синхротрона | 1985 |
|
SU1362388A1 |
%Выход
i/2.2
