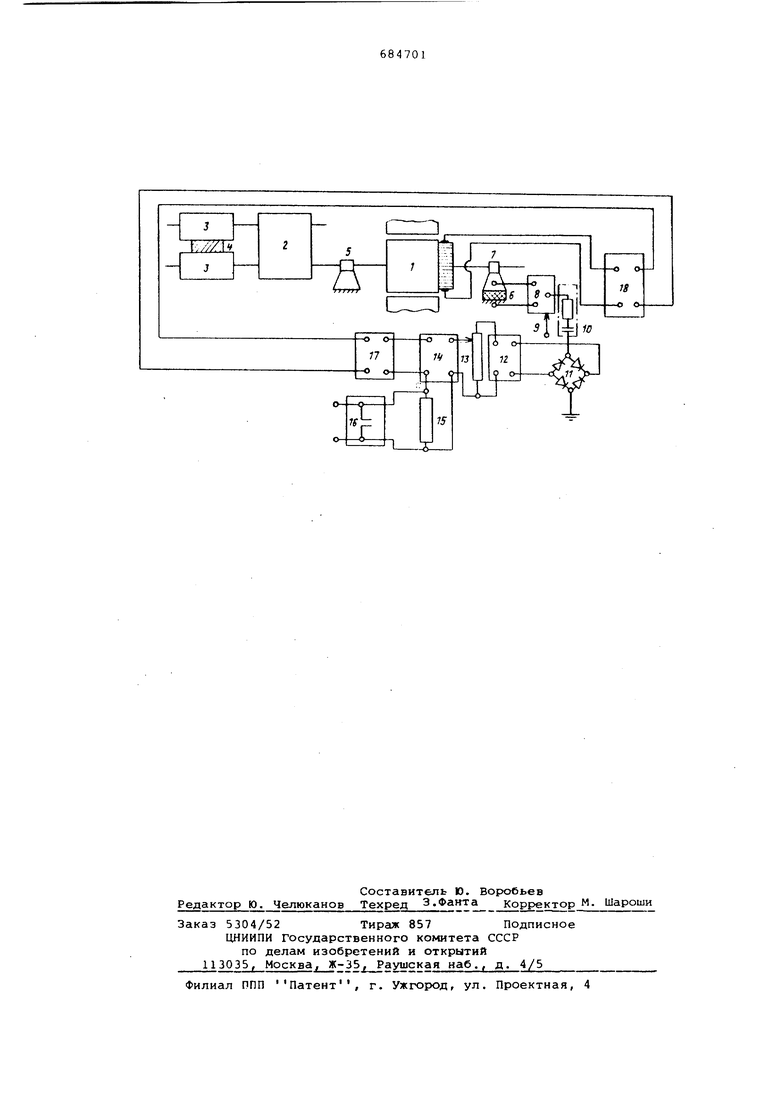
Выход выпрямителя li подключен к входу блока 12 сравнения сигналов, выход которого через потенциометр 13 подключен к первому входу блока 14 преобразованмя сигнала, К другому входу этого блока, к сопротивлению 15 обратной связи блока 14 подключен выход датчика 16 тока прокатного электродвигател а выход блока 14 подключен к входу системы 17 автоматического регулир вания частоты вращения электродвиг теля, выход которой подключен к ре гулируемому источнику 18 питания. Устройство работает следующим образом. До захвата металла валками, т. холостом ходе электродвигателя 1, вращающего через шестеренную кл 2 валки 3, ЭДС подшипниковых токов электродвигателя невелика, а высок частотная составляющая в спектре этой ЭДС практически отсутствует. При захвате валками 3 слитка 4 благодаря возникновению крутильных колебаний и изменению магнитоупругих свойств вала электродви гателя возникает высокочастотная составляющая ЭДС подяипниковых токов значительной амплитуды, пропорциональная механическому момен.ту в валопрбводе. ЭДС подшипниковых токов электродвигателя усиливается с помощью усилителя 8, корректируется по степени ослабле ния поля электродвигателя посредством сигнала 9, а переменная составляющая этой ЭДС, пропорциоиапьнаА механическим напряжениям в вале электродвигателя, отфильтровывается с помощью дифференциру щего контура 10, йыпрямляется выпрямителем 11 и сравнивается с эталонным напряжением блока 12. Э лонное напряжение необходимо для исключения попадания помех низкочастотной составляющей ЭДС подшип никовых токов, пропорциональной ч тоте вращения электродвигателя. Разность напряжений выпрямителя Ни эталонного напряжения сравнения блока 12 через корректирующ потенциометр 13 поступает на вход блока 14 преобразования сигнала. Корректирующий потенциометр 13 не обходим для учета коэффициента динамичности, т. е. превышения механического момента в вале над статическим г ментом нагрузки. Бл гсГдаря этому напряжение на выходе блока 14 оказывается равным стати ческому возмущающему моменту на валу электродвигателя, т. е, wменту прокатки. Таким образом, вплоть до момента появления тока нагрузки электродвигателя 1, на выходе системы 17 автоматического регулирования частоты вращения электродвигателя и на выходе его регулируемого источника 18 питания будет действовать сигнал пропорциональный возмущающему воздействию, благодаря чему динамическое падение частоты врамения электродвигателя будет существенно уменьшено. После захвата металла и появления тока нагрузки электродвигателя сопротивление 15 обратной связи окажется зашунтированным выходным сигналом датчика 16 тока электродвигателя, в результате чего сигнал возмущающего воздействия на выходе блока 14 будет автоматически отключен. Таким образом, введение потенщюметра, блока преобразования сигнала и датчика тока позволило уменьишть динамическое падение частоты вращения электродвигателя при ударной нагрузке. Формула изобретения Устройство для комбинированного управления электродвигателем постоянного тока при ударной нагрузке, содержащее измеритель крутящего момента, выход которого соединен со BXOjiOM блока сравнения сигналов, а также систему регулиронания частоты вращения электродвигателя, отличающееся тем, что, с целью уменьшения динамического падения частоты, введены потенциометр, блок преобразования сигнала и датчик тока электродвигателя, причем выход блока сравнения сигналов через потенциометр подключен к первому входу блока преобразования сигнала, выход которого подключен к входу системы регулирования частоты вращения электродвигателя, а выход датчика тока подключен ко второму входу блока преобразования сигнала. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 334626, кл. Н 02 Р 5/00, 1969. 2.Патент Японии 43-29617, кл. 55 С 210, 1968.