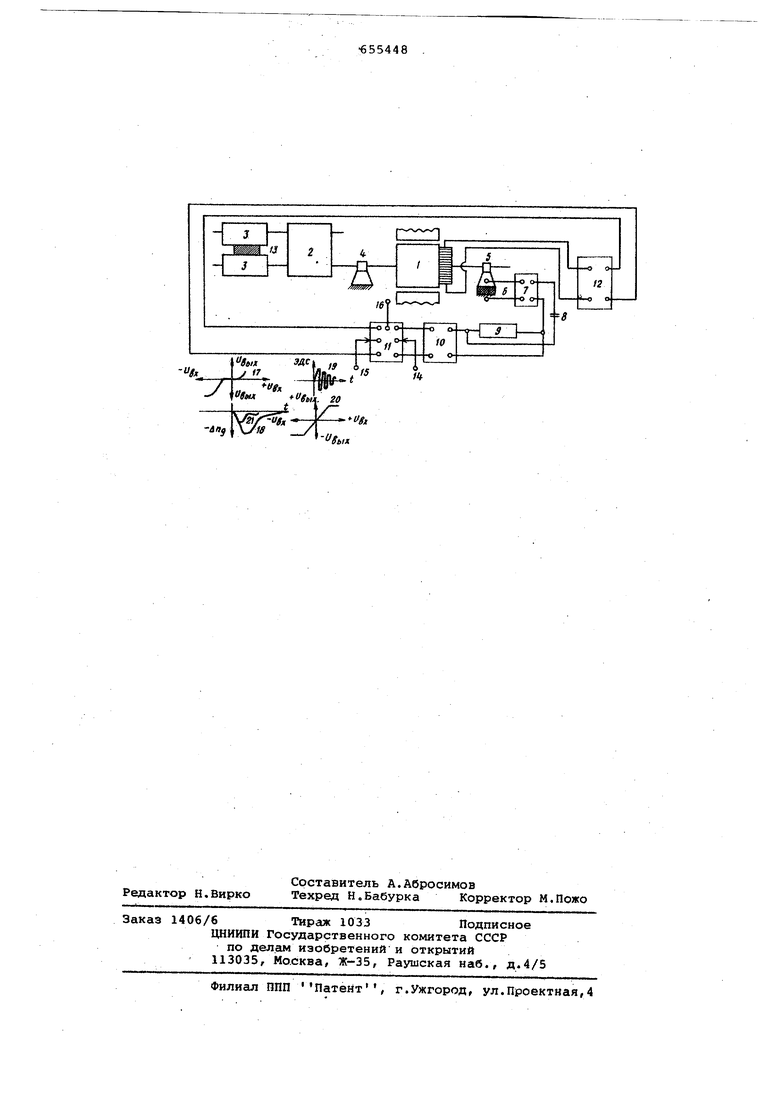
3 Известно, что с целью Г1овыи ення динамической точности регулирования, в частности, для уменьшения динамического падения частоты вращения электродвигателя при ударной нагрузк разработана система регулирования 2 которая действует по принципу комбинированного регулирования, т.е. с использованием сигналов по возмущению, в данном случае - по моменту прокатки. В указанной системе в качестве сигнала,пропорционального возмуиающе му воздействию на вапу электродвигат ля,используется величина начального отрицательного ускорения привода,воз никающая в момент приложения нагрузки. Известно также устройство для управления главным приводом клети непрерывного прокатного стана 3, которое с целью предотвращения динамического падения скорости в момент захвата металла снабжено измерителем крутящих моментов, т.е. содержит дат чик возмущения. Однако в нем сигнал от измерителя крутящего момента не подают в систему регулирования частоты вращения данной клети, а используют лишь как информацию о захвате металла валками Существующие способы и устройства не устраняют нелинейности (разрывности) характеристик систем регулиро вания, вызванной дискретностью входя щих в них элементов-, что ухудшает ди намические параметры системы. Наиболее близким к описываемому изобретению по технической сущности и достигаемому результату является способ вибрационной линеаризации посредством вынужденных колебаний или автоколебаний управляющего элемента, воздействующего на электродвигатель 4 . Для режима вибрационной линеариза ции посредством вынужденных колебаний или автоколебаний необходимо, в первом случае наличие специального источника этих колебаний, а во второ случае - создание в регуляторе гибкой положительной обратной связи со специальными параметрами цепей, обес печивающими необходимый колебательны режим исполнительных элементов. Кроме того, при осуществлении это го способа вибрационной линеаризации управление временем действия режима этой линеаризации не лимитировано. Тем не менее, для режима ударных нагрузок целесообразно режим вибрационной линеаризации вводить в систе му авторегулирования в момент прило жения этой нагрузки к валу электродвигателя и отключать режим линеари зации после окончания переходного .процесса изменения частоты вращения электродвигателя. С цельно повышения быстродействия надежности и уменьшения динамическо 8 го падения частоты вращения злектродвигателя измеряют ЭДС его подшипни$ овых токов, усиливают эту ЭДС, выделяют из нее высокочастотную составляющую, которую затем вводят в качестве сигнала вибрационной линеаризации в систему регулирования частоты вращения электродвигателя. .На чертеже представлено устройство, реализующее предлагаемый способ. Оно содержит прокатный электродвигатель 1, шестеренную часть 2, валки 3, заземленный подшипник 4 прокатного электродвигателя, изолированный подшипник 5 прокатного электродвигателя, изолирующую прокладку б, усилитель 7, емкость 8, резистор 9, формирователь 10 высокочастотных сигналов вибрационной линеаризации, систему 11 регулирования частоты вращения электродвигателя, регулируемый источник питания 12 электродвигателя. Прокатный электродвигатель 1 через шестеренную часть 2 вращает валки 3, прокатывающие загбтовку 13. При этом подшипник 4 электродвигателя заземлен, а подшипник 5 изолирован от земли с помощью изолирующей прокладки б. ЭДС подшипниковых токов электродвигателя, замеренная между изолироК ванным подшипником 5 и землей, усиливается с. помощью усилителя 7. Высокочастотная составляющая этой ЭДС, появляющаяся при возникновении крутильных колебаний валопровода и собственно вала электродвигателя при набросе нагрузки, т.е. при захвате металла валками, выделяется с помощью R-С фильтра, состоящего из емкости 8, резистора 9, и подается на вход формирователя 10 высокочастотных сигналов вибрационной линеаризации. Выход формирователя 10 связан с входом системы 11 регулирования частоты вращения электродвигателя 1. , На другие входы этой системы поданы соответственно задающий сигнал 14 управления, сигнал 15 обратной связи по какому-либо параметру, например по частоте вращения электродвигателя, и сигнал 16, пропорциональный возмущающему воздействию на валу электродвигателя. Выход системы 11 подключен ко входу источника питания 12. Система работает следующим образом. При захвате металла валками прокатного стана, вследствие упругости элементов линии валопровода системы электродвигатель-валки, возникают крутильные колебания этих элементов, в том числе и вала прокатного электродвигателя 1. В результате на вход формирователя 10 поступает отфильтрованная R-C фильтром высокочастотная составляющая ЭДС подшипниковых токон, обуслонленная высокочастотными крутильными колебаниями вала электродвигателя и изменениями его магнитоупругих свойств. В формирователе 10 эта ЭДС, имеющая практически синусоидальную форму масштабируется и подается на вход системы 11 в качестве высокочастотного сигнала вибрационной линеаризации При необходимости в формирователе 10 может осуществляться удвоение или увеличение в большее количество раз частоты, отфильтрованной R-C фильтром ЭДС подшипниковых токов. На чертеже кривой 17 представлена статическая характеристика злементов системы регулирования 11, т.е. зависимость выходного сигнала Ugt,ix - входного Ugj. Такая характеристика обусловлена, например, дискретностью системы импульсно-фазового управлени тиристорного источника питания и т.д и является одной из причин повышенных перерегулирования и динамического отклонения частоты вращения AUgf электродвигателя при ударной нагрузке (см. кривую 18). Высокочастотная составляющая подшипниковых токов электродвигателя в функции времени имеет вид, представленный на чертеже кривой 19, .и характеризуется затуханием в соответствии с затуханиями крутильных колебаний системы валопровода после окончания захвата металла. В результате подачи на вход системы регулирования сформированной формирователем 10 высокочастотной соста ляющей ЭДС подшипниковых токов электродвигателя статическая характеристи ка системы регулирования линеаризуется и принимает вид представленный на чертеже кривой 20. При этом динамическое отклонение частоты вращения электродвигателя при ударной нагрузке уменьшается (см. кривую 21). Таким образом, в предлагаемом способе высокочастотная составляющая ЭДС подшипниковых токов электродвигателя, возникающая вследствие изменения магнитоупругих свойств его вала при крутильных колебаниях линии валопровода в режиме ударных нагрузок, является высокочастотным сигналом вибрационной линеаризации. При введении этого сигнала в систему регулирования исключается нелинейность характеристик элементов этой системы, вследствие чего уменьшается динамическое отклонение частоты вращения электродвигателя при ударных нагрузках. По окончании крутильных колебаний элементов линии валопровода, в том числе и вала электродвигателя, сигнал вибрационной линеаризации автоматически прекращает действовать, что является одним из достоинств предлагаемого способа. Формула изобретения Способ управления электродвигателем постоянного тока при ударной нагрузке преимущественно для привода валков прокатного стана, основанный на режиме вибрационной линеаризации, отличающийся тем, что, с целью повышения быстродействия и надежности и уменьшения динамического Псщения частоты вращения электродвигателя, измеряют ЭДС его подшипниковых токов, вьоделяют из нее высокочастотную составляющую, которую затем вводят в качестве сигнала вибрационной линеаризации в систему регулирования частоты вращения электродвигателя. Источники информации, принятые so внимание при экспертизе 1.Фишбейн В.Г. Расчет систем подчиненного регулирования вентильного электропривода постоянного тока. Энергия, 1972, с. 9-11. 2.Зёленов А.Б. и М.Ю. Файнберг. Комбинированная система стабилизации скорости автоматизированных электроприводов постоянного тока. Электричество. 1969, № 2. 3.Авторское свидетельство № 334626, кл. В 21 В 35/04, 12.06.69. 4.Рязанов Ю.А. Проектирование систем автоматического регулирования, Машгиз, 1968, с. 119-125.
-ЛЯу