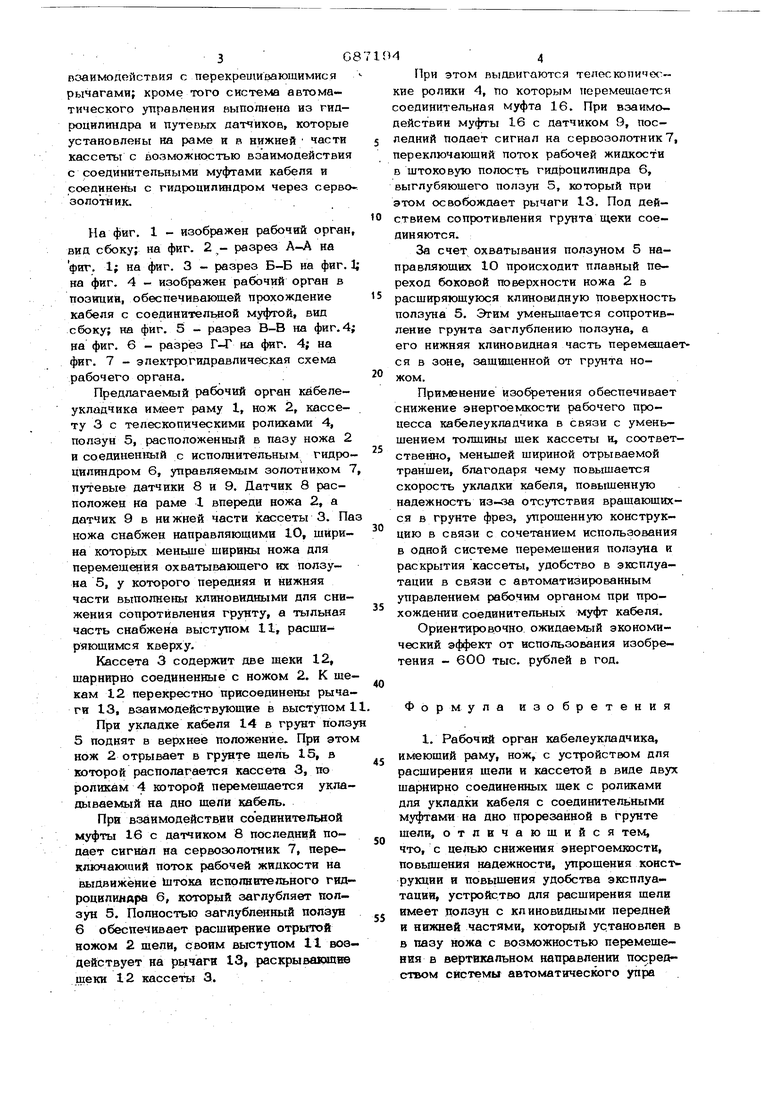
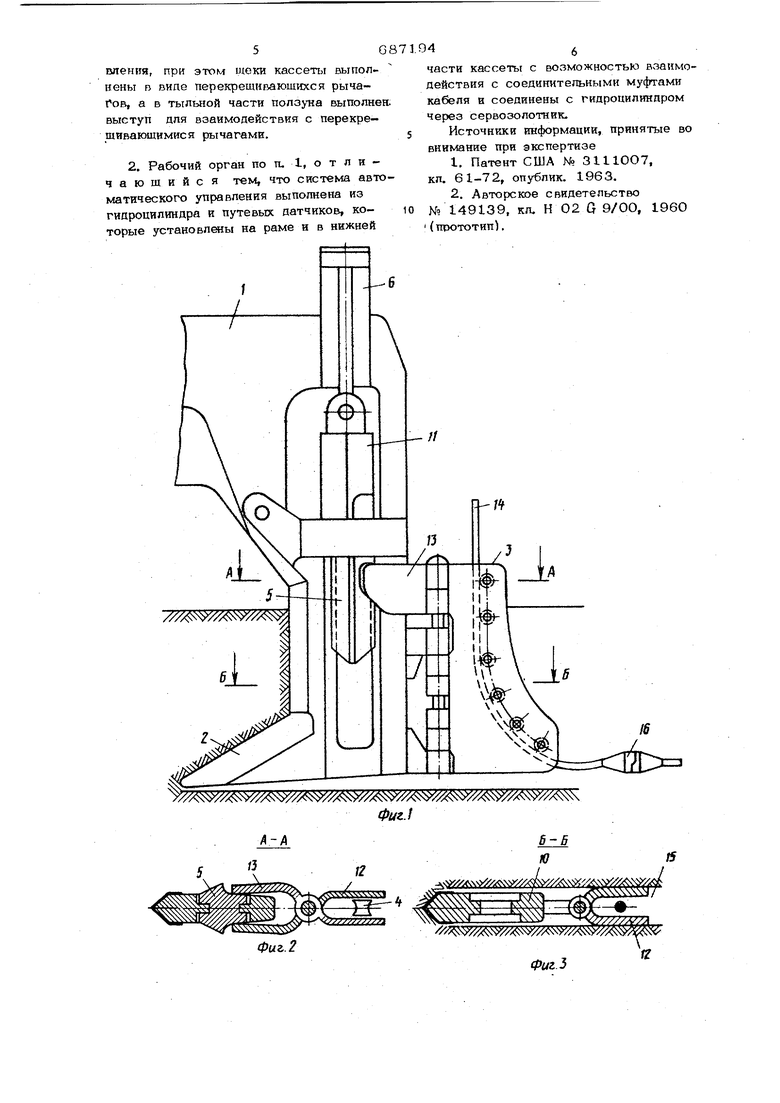
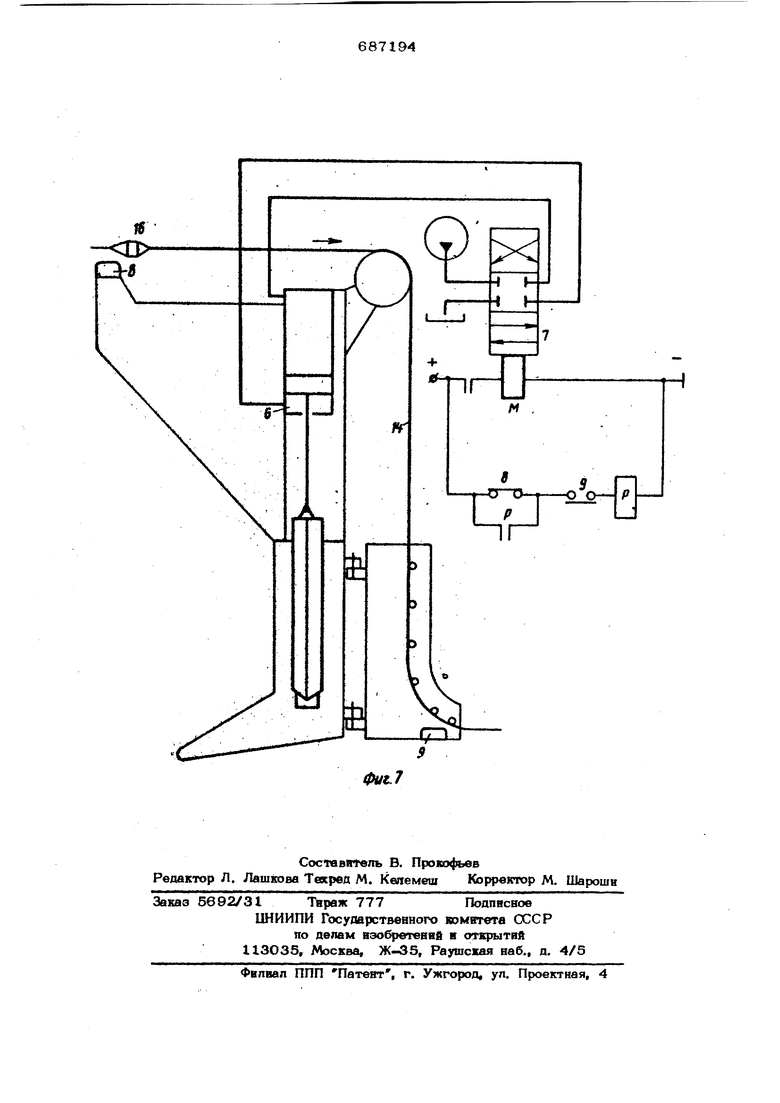
(54) РАБОЧИЙ ОРГАН КАБЕЛЕУ1СПАДЧИКА 3G взаимодействия с перекреишвающимися рычагами; кроме того система автоматического управления выполнена из гиароципиндра и путевых датчиков, которые установлены на раме и в нижней части кассеты с возможностью взаимодействия с соединительными муфтами кабеля и соединены с гидроципиндром через серво золотник. На фиг, 1 - изображен рабочий орган вид сбоку; на фиг. 2 - разрез А-А на фиг, 1; на фиг. 3 - разрез Б-Б на фиг. на фиг. 4 - изображен рабочий орган в позиции, обеспечивающей прохождение кабеля с сое цинительной муфтой, вид сбоку; на фиг. 5 - разрез В-В на фиг.4 на фиг. б - разрез Г-Г на фиг. 4; на фиг. 7 - электрогидравлическая схема рабочего органа.. Предлагаемый рабочий орган кабелеукладчика имеет раму 1, нож 2, кассету 3 с телескопическими роликами 4, ползун 5, расположенный в пазу ножа 2 и соединенный с исполнительным гидро ципиндром 6, управляемым золотником путевые датчики 8 и 9. Датчик 8 расположен на раме t впереди ножа 2, а датчик 9 в ни жней части кассеты 3. Па ножа снабжен направляющими 10, ширина которых меныие щирины ножа для перемещения охватывающего кх ползуна 5, у которого передняя и нижняя части выполнены клиновидными для снижения сопротивления грунту, а тыльная часть снабжена выступом 11, расширяющимся кверху. Кассета 3 содержит две теки 12, шарнирно соединенные с ножом 2. К ше кам 12 перекрестно присоединены рыча ги 13, взаимодействующие в выступом При укладке кабеля 14 в грунт полз 5поднят в верхнее положение. При это нож 2 отрывает в грунте щель 15, в которой располагается кассета 3, по роликам 4 которой перемещается укладываемый на дно щели кабель. При взаимодействии соединительной муфты 16 с датчиком 8 последний подает сигнал на сервозолотник 7, переключающий поток рабочей жидкости на выдвижение luTOKa исполнительного гидроцилиндра 6, который заглубляет попзун S. Полностью заглубленный ползун 6обеспечивает расширение отрытой ножом 2 щели, своим выступом 11 воздействует на рычага 13, раскрывающие щеки 12 кассеты 3. 4 При этом выдвигаются тепескопичес - кие ролики 4, по которым перемещается соединительная муфта 16. При взаимодействии 16 с датчиком 9, последний подает сигнал на сервозолотник 7, переключающий поток рабочей жидкости в щтоковую полость гид1эоцилиндра 6, выглубяюшего ползун 5, который при этом освобождает рычаги 13. Под действием сопротивления грунта щеки соединяются. За счет охватывания ползуном 5 направляющих 1О происходит плавный переход боковой поверхности ножа 2 в расширяющуюся клиновидную поверхность ползуна 5. Этим уменьшается сопротивление грунта заглублению ползуна, а его нижняя клиновидная часть перемещается в зоне, защищенной от грунта ножом. Применение изобретения обеспечивает снижение энергоемкости рабочего процесса кабелеукладчика в связи с уменьшением толщины щек кассеты и, соответственно, меньшей шириной отрываемой траншеи, благодаря чему повышается скорость укладки кабеля, повышенную надежность отсутствия врашающих- ся в грунте фрез, упрощенную конструкцию в связи с сочетанием использования в одной системе перемещения ползуна и раскрытия кассеты, удобство в эксплуатации в связи с автоматизированным управлением рабочим органом при прохождении соединительных муфт кабеля. Ориентиров.очно ожидаемый экономический эффект от использования изобретения - 600 тыс. рублей в год. Формула изобретения 1. Рабочий орган кабелеукладчика, имеющий раму, нож, с устройством для расширения щели и кассетой в виде двух шарнирно соединенных шек с роликами для укладки кабеля с соединительными муфтами на дно прорезанной в грунте шелй, отличающийся тем, что, с целью снижения энергоемкости, повышения надежности, упрощения конструкции и повышения удобства эксплуатации, устройство для расширения щели имеет ползун с клиновидными передней и нижней частями, который установлен в в пазу кожа с возможностью перемещения в вертикальном направлении посредством системы автоматического упра
5G8
плення, при этом щеки кассеты выполнены в виде перекрещивающихся рычаfoB, а в тыльной части ползуна выполнен, выступ для взаимодействия с перекрещивающимися рычагами.
2. Рабочий орган по п. I, о т л и чаюшийся тем, что система автоматического управления выполнена из гидроцилиндра и путевых датчиков, которые установлены на раме н в нижней
Фиг.. 2
946
части кассеты с возможностью взаимодействия с соединительными муфтами кабеля и соединены с гидроцилиндром через сервозолотник.
Источники информации, принятые во внимание при экспертизе
1.Патент США № 31110О7, кл, 61-72, опублик. 1963.
2.Авторское свидетельство
№ 149139, кл. Н 02 G 9/00, I960 (прототип), .//AiS //: ///ff //
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочий орган плужного кабелеукладчика | 1960 |
|
SU149139A1 |
| Прицепной кабелеукладчик | 1983 |
|
SU1208593A1 |
| Комплексный универсальный кабелеукладчик | 1988 |
|
SU1714056A1 |
| Рабочий орган кабелеукладчика | 1976 |
|
SU557152A1 |
| Кабелеукладчик | 1983 |
|
SU1229280A1 |
| КАБЕЛЬНЫЙ БАРАБАН ДЛЯ НАМОТКИ-РАЗМОТКИ СИЛОВОГО КАБЕЛЯ | 2024 |
|
RU2835173C1 |
| Кабелеукладчик | 1979 |
|
SU864401A1 |
| НОЖЕВОЙ ПРИЦЕПНОЙ КАБЕЛЕУКЛАДЧЙК | 1973 |
|
SU379950A1 |
| Устройство для ремонтно-монтажных работ на электрических сетях | 1978 |
|
SU738026A1 |
| Гидропривод кабелеукладчика | 1989 |
|
SU1677197A1 |
Фиг. 5
