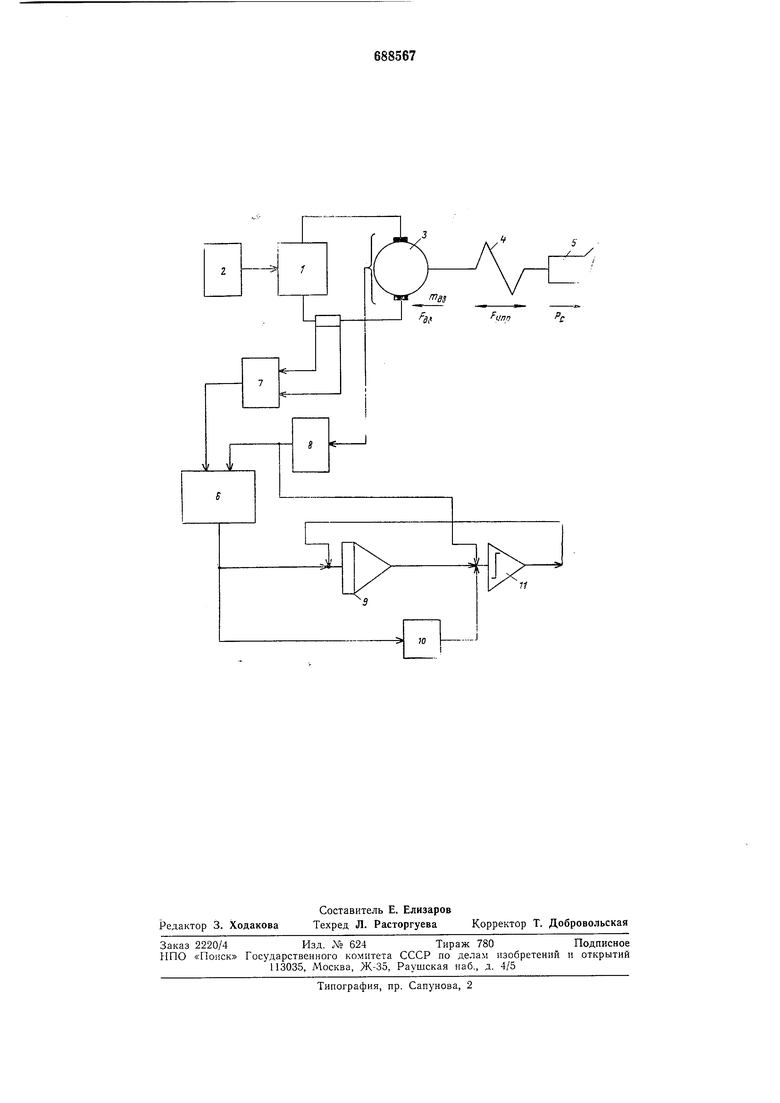
Изобретение относится к одноковшовым экскаватором с приводом по системе управляемый преобразователь-двигатель и может быть использовано для измерения внешней нагрузки на механизмы, расчетные схемы которых могут быть представлены в виде двухмассовой схемы замеш,ения с упругой связью. Известны устройства, предназначенные для определения величины усилия в механизме экскаватора, привод которого выполнен по системе управляемый преобразователь-двигатель с регуляторами тока и скорости. В таких устройствах определения усилия в механизме основано на решении уравнения Fynp СI - т. где fynp - усилие в упругой связи (канаС - коэффициент пропорциональности между током и усилием двигателя;/ - ток якорной цепи привода; /Пдв - приведенная масса двигателя; скорость двигателя, приведенная к рабочему органу 1. Таким образом, подобные устройства позволяют определить нагрузку только в упру010 15 (1) 20 25 30 гом элементе, которая является косвенным показателем возмушения, действуюшего на рабочий орган механизма, который представляет собой двухмассовую систему. Кроме того, дифференцирование сигнала о скорости, снимаемого с тахогенератора, который имеет значительные пульсации, вносит большую погрешность в измерение. Известно устройство, содержашее преобразователь с системой управления и подключенным к нему двигателем, который соединен с рабочим органом через упругую связь, датчик упругого усилия, входами связанный с датчиком тока и датчиком скорости 2. Такое устройство позволяет косвенным путем измерить нагрузку также только в упругом элементе, которая существенно отличается от внешней нагрузки, действующей непосредственно на рабочий орган. Целью изобретения является повышение надежности электромеханического оборудования копающих механизмов экскаватора путем обеспечения возможности измерения внешней нагрузки. Указанная цель достигается тем, что устройство снабжено дифференцирующим звеном и последовательно включенными интегратором и усилителем без обратной связи, входы которого соединены с датчиком скорости и через дифференцирующее звено с датчиком упругого усилия, а выход - с входом интегратора, второй вход которого подключен к выходу датчика упругого усилия. На чертеже изображена схема устройства для измерения нагрузки на коиающий механизм экскаватора. Устройство содержит преобразователь 1 с системой управления 2 и подключенным к нему двигателем 3, который соединен через упругую связь 4 с рабочим органом 5 экскаватора, датчик упругого усилия 6, входами связанный с датчиком тока 7 и датчиком скорости 8, а выходом - с интегратором 9 и через дифференцирующее звено 10 с усилителем 11, выполненным без обратной связи. Устройство работает следующим образом. Датчик упругого усилия 6, подключенный к датчикам тока 7 и скорости 8, определяет усилие в упругом элементе путем рещения методом неявного дифференцирования уравнения (CJ-F) m,V,,(2) где /упр - усилие в упругом элементе (канате) ; тдв - приведенная масса двигателя; / - ток в якорной цепи привода; Р - оператор дифференцирования. Из уравнения для . упр - (дв Iз)) где Ск - жесткость упругого элемента (каната) ; 1/2 - скорость рабочего органа (ковша); с помощью преобразований и подстановки в него уравнения для скорости Vz Лпо - PC, упр где PC - внешняя нагрузка; mz - масса рабочего органа (ковша); получим С - /упр - Я - т,1/д,.(5) Из уравнения (5) видно, что текущее значение внешней нагрузки PC, действующей на рабочий орган механизма, можно определить через текущие значения регулируемых параметров электропривода Рупр и Удв. Это уравнение рещается с помощью интегратора 9 и усилителя 11 без обратной связи. Электрический сигнал, пропорциональный усилию PC, снимается в виде выходного напряжения с усилителя И. На входе интегратора 9 напряжение пропорционально интегралу от разности (PC - Рупр), на другие входы усилителя 11 подаются сигнал, пропорциональный скорости, с коэффициентом передачи (-т) и сигнал, пропорциональный производной от упругого усилия, с коэффициента передачи --. Применение предлагаемого устройства для измерения нагрузки на копающий механизм экскаватора в системе защиты от перегрузок позволяет уменьшить динамические усилия на 15-18% и тем самым повысить надежность электромеханического оборудования экскаватора. Формула изобретения Устройство для измерения нагрузки на копающий механизм экскаватора с электроприводом, содержащее преобразователь с системой управления и подключенным к нему двигателем, который соединен с рабочим органом через упругую связь, датчик упругого усилия, входами связанный с датчиком тока и датчиком скорости, отличающееся тем, что, с целью повышения надежности электромеханического оборудования путем обеспечения возможности измерение внешней нагрузки, оно снабжено дифференцирующим звеном и последовательно включенными интегратором и усилителем без обратной связи, входы которого соединены с датчиком скорости и через дифференцирующее звено с датчиком упругого усилия, а выход - с входом интегратора, второй вход которого подключен к выходу датчика упругого усилия. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 412354, кл. Е 02F 9/20, 1972. 2. Авторское свидетельство СССР N° 377949, кл. Н 02Р 5/00, 1970,
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ВЕЛИЧИНЫ УСИЛИЯ В МЕХАНИЗМЕ | 1973 |
|
SU377949A1 |
| Способ управления процессом копания одноковшового экскаватора | 1988 |
|
SU1664981A1 |
| Устройство для ограничения динамических нагрузок копающих механизмов экскаватора | 1990 |
|
SU1740571A1 |
| Способ ограничения динамических нагрузок копающих механизмов экскаваторов и устройство для его осуществления | 1978 |
|
SU765470A1 |
| Способ управления процессом копания на одноковшовых экскаваторах и устройство для его осуществления | 1989 |
|
SU1671801A1 |
| Устройство для управления копающими механизмами экскаватора | 1978 |
|
SU749996A1 |
| УСТРОЙСТВО КОМБИНИРОВАННОГО ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЭКСКАВАТОРА | 1990 |
|
RU2030521C1 |
| Устройство для управления копающим механизмом экскаватора | 1976 |
|
SU730939A1 |
| Электропривод | 1986 |
|
SU1390756A2 |
| Устройство для управления копающимМЕХАНизМОМ эКСКАВАТОРА | 1978 |
|
SU798251A1 |