Изобретение относится к горной промышленности и может быть использовано для управления рабочим оборудованием одноковшового экскаватора.
Цель изобретения - повышение производительности, надежности и долговечности экскаватора за счет снижения длительности копания и динамических нагрузок копающего механизма.
Сущность способа заключается в том, что при условии, что скорость копания меньше заданной, а сумма усилия и производной усилия в копающем механизме равна или больше заданного значения, формируют управляющее воздействие, пропорциональное сумме ускорения ковша и отклонению величины скорости движения ковша от заV VA- -
данного значения, причем скорость ковша определяют по формуле 1 d Fy
dt где VK - скорость ковша;
УД - скорость двигателя копающего механизма;
с - жесткость упругой связи;
Fy - усилие в копающем механизме.
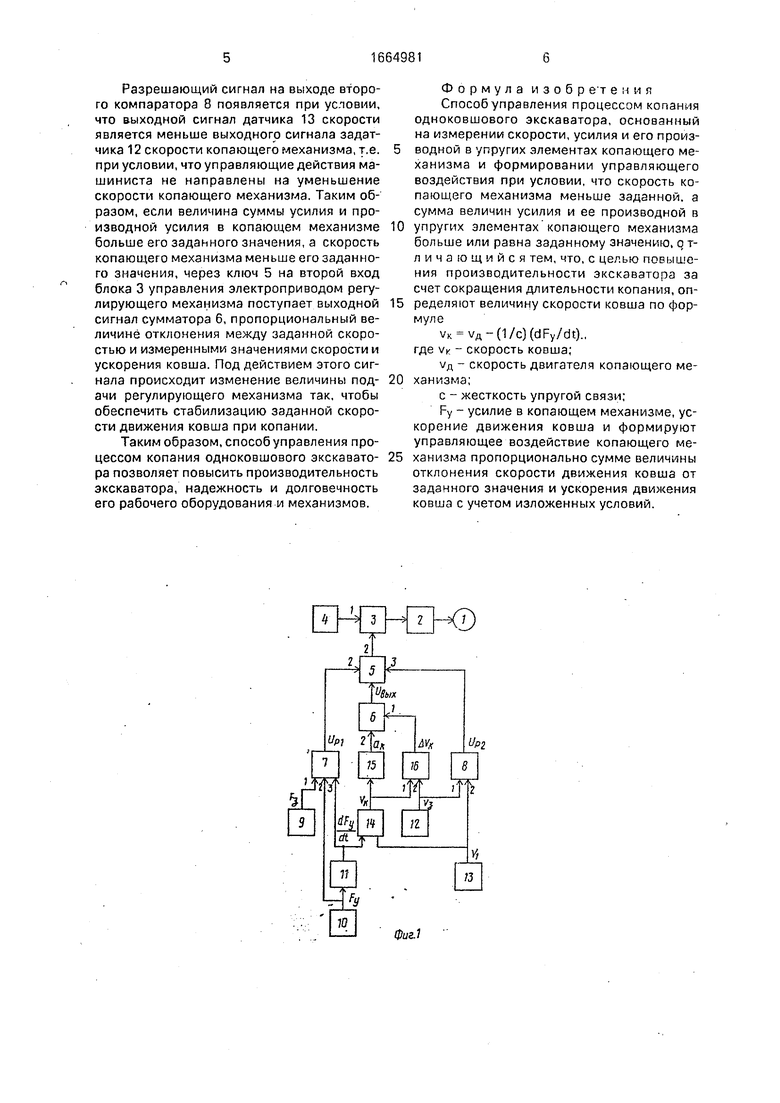
На фиг.1 представлена блок-схема для осуществления способа; на фиг.2 - осциллограмма измерения скорости ковша.
Устройство содержит электропривод 1 регулирующего механизма с управляемым преобразователем 2 и блоком 3 управления электроприводом, к первому входу которого подключен выход задатчика 4 скорости ресь о
5.
00
гулирующего механизма, а к второму - выход управляемого ключа 5. Основной первый вход управляемого ключа 5 соединен с выходом-сумматора 6. Управляющие (второй и третий) входы ключа 5 подключены соответственно к выходам первого 7 и второго 8 компараторов. На первом компарато- ре 7 сравниваются сигналы, поступающие на его первый, второй и третий входы от задатчика 9 усилия, датчика 10 усилия и датчика 11 производной усилия копакщего механизма. На втором компараторе 8 сравниваются сигналы, поступающие на его первый и второй входы от эадатчика 12 и датчика 13 скорости копающего механизма. Первый и второй входы датчика 14 скорости ковша соединены с выходами датчика 11 производной усилия и датчика 13 скорости копающего механизма. Выход датчика 14 скорости ковша подключен к входу датчика 15 ускорения ковша и к первому входу нелинейного элемента 16, второй вход которого соединен с выходом задатчика 12 скорости копающего механизма. Выходы нелинейного элемента 16 и датчика 15 ускорения ковша подключены к первому и второму входам сумматора 6.
Решение уравнения осуществляется с помощью датчика 14 скорости ковша, реализованного на операционном усилителе на интегральной микросхеме в виде сумматора.
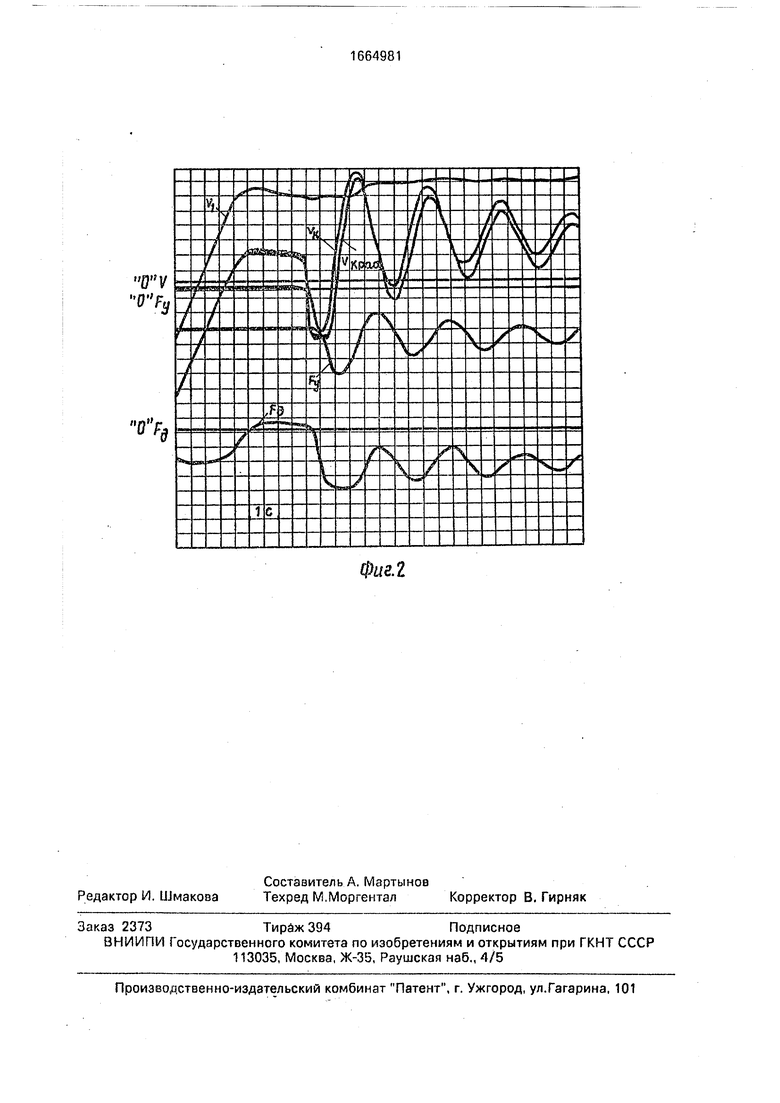
На фиг.2 представлена осциллограмма работы датчика косвенного измерения скорости ковша, полученная при моделировании на ЭВМ процесса отрыва ковша от грунта. На осциллограмме зафиксированы следующие переменные:
УД - скорость двигателя копающего механизма экскаватора;
VK - скорость ко вша при моделировании процесса отрыва ковша;
Ук.расч скорость ковша, определенная в соответствии с указанным выражением;
Fy - усилие в канатах копающего механизма;
Рд - усилие на валу двигателя. Датчик 15 ускорения ковша может быть выполнен в виде дифференциатора на основе операционного усилителя на интегральной микросхеме. Нелинейный элемент 16 может быть реализован в виде сумматора с ограничителем в цепи обратной связи на базе интегральной микросхемы.
Устройство работает следующим образом.
,При копании машинист экскаватора с помощью задатчиков 4 и 12 скорости регулирующего и копающего механизмов осуществляет изменение скорости этих механизмов. Измерение скорости и усилия в копающем механизме обеспечивается соответствующими датчиками 13 и 10 этих параметров. Величина производной усилия в
копающем механизме определяется датчиком 11 производной усилия путем дифференцирования сигнала, поступающего на его оход с выхода датчика 10 усилия копающего механизма. Датчик 14 скорости ковша
0 обеспечивает косвенное измерение скорости ковша по величинам скорости и производной усилия копающего механизма в соответствии с указанным выражением. Для этого на первый и второй входы датчика 14
5 скорости ковша поступают выходные сигналы датчика 11 производной усилия и датчика
13скорости копающего механизма. Величина ускорения ковша определяется датчиком 15 ускорения ковша путем дифференциро0 вания сигнала, поступающего на его вход с выхода датчика 14 скорости ковша.
К первому и второму входам нелинейного элемента 16 подключены выходы датчика
14скорости ковша и задатчика 12 скорости 5 копающего механизма, При этом выходной
сигнал нелинейного элемента 16 типа звено ограничения пропорционален величине отклонения между заданным и измеренным значениями скорости ковша. Выходной сиг0 нал нелинейного элемента 16 ограничен по величине значением, соответствующим заданию номинальной скорости электропривода регулирующего механизма. Путем сложения сигналов, поступающих на пер5 вый и второй входы сумматора 6 с выходов нелинейного элемента 16 и датчика 15 ускорения ковша, формируется управляющее воздействие, пропорциональное величине отклонения между заданным значением
0 скорости и измеренными значениями скорости и ускорения ковша. Выходной сигнал сумматора поступает на основной (первый) вход ключа 5, который выполняет логическую функцию И. При этом подключение
5 выхода сумматора 6 к второму входу блока 3 управления электроприводом регулирующего механизма производится только при наличии разрешающих сигналов на втором и третьем входах ключа 5, которые
0 поступают с выходов первого 7 и второго 8 компараторов, Разрешающий сигнал на выходе первого компаратора 7 появляется при превышении величиной суммы выходных сигналов датчика 10 усилия и
5 датчика 11 производной усилия заданного значения усилия в копающем механизме, которое устанавливается на задатчике 9 усилия копающего механизма и соответствует 0,75 - 0,85 от стопорного значения усилия.
Разрешающий сигнал на выходе второго компаратора 8 появляется при условии, что выходной сигнал датчика 13 скорости является меньше выходного сигнала задат- чика 12 скорости копающего механизма, т.е. при условии, что управляющие действия машиниста не направлены на уменьшение скорости копающего механизма. Таким образом, если величина суммы усилия и производной усилия в копающем механизме больше его заданного значения, а скорость копающего механизма меньше его заданного значения, через ключ 5 на второй вход блока 3 управления электроприводом регулирующего механизма поступает выходной сигнал сумматора 6, пропорциональный величине отклонения между заданной скоростью и измеренными значениями скорости и ускорения ковша. Под действием этого сигнала происходит изменение величины под- ачи регулирующего механизма так, чтобы обеспечить стабилизацию заданной скорости движения ковша при копании.
Таким образом, способ управления процессом копания одноковшового экскавато- ра позволяет повысить производительность экскаватора, надежность и долговечность его рабочего оборудования и механизмов.
Формула и з о б р е т е н и я
Способ управления процессом копания одноковшового экскаватора, основанный на измерении скорости, усилия и его производной в упругих элементах копающего механизма и формировании управляющего воздействия при условии, что скорость копающего механизма меньше заданной, а сумма величин усилия и ее производной в упругих элементах копающего механизма больше или равна заданному значению, о т- л и чающийся тем, что, с целью повышения производительности экскаватора за счет сокращения длительности копания, определяют величину скорости ковша по формуле
VK vA-(1/c)(dFy/dt).. где VK - скорость ковша;
vA - скорость двигателя копающего механизма;
с - жесткость упругой связи;
Fy - усилие в копающем механизме, ускорение движения ковша и формируют управляющее воздействие копающего механизма пропорционально сумме величины отклонения скорости движения ковша от заданного значения и ускорения движения ковша с учетом изложенных условий.
i
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического управления процессом копания на одноковшовых экскаваторах и устройство для его осуществления | 1981 |
|
SU977623A1 |
| Способ ограничения динамических нагрузок копающих механизмов экскаваторов и устройство для его осуществления | 1978 |
|
SU765470A1 |
| Устройство для управления движением ковша экскаватора-драглайна | 1989 |
|
SU1659599A1 |
| Способ управления электроприводом напора экскаватора и устройство для его осуществления | 1986 |
|
SU1430475A1 |
| Устройство управления электроприводом копающего механизма экскаватора | 1989 |
|
SU1656084A1 |
| Способ управления копающим механизмом экскаватора и устройство для его осуществления | 1980 |
|
SU901417A1 |
| Устройство выбора слабины подъемных канатов экскаваторов-драглайнов | 1980 |
|
SU939674A1 |
| Устройство для ограничения динамических нагрузок копающих механизмов экскаватора | 1990 |
|
SU1740571A1 |
| Устройство автоматического управления процессом копания драглайна | 1982 |
|
SU1063950A1 |
| Устройство для управления копающими механизмами экскаватора | 1981 |
|
SU1076549A2 |
Изобретение относится к горной пром-сти и позволяет повысить произв-сть экскаватора за счет сокращения длительности копания. Способ основан на измерении скорости двигателя Vд, усилия Fу и его производной в упругих элементах копающего механизма (КМ). По величинам скорости и производной усилия КМ определяют величину скорости ковша по формуле Vк = Vд -(1/C)(DFу/DT), где C - жесткость упругой связи. Затем путем дифференцирования величины Vк определяют ускорение ковша. После чего при условии, что скорость КМ меньше заданной, а сумма величин усилия и ее производной в упругих элементах КМ больше или равна заданному значению, формируют управляющее воздействие. Последнее пропорционально сумме величины отклонения величины скорости движения ковша от заданного значения и ускорению движения ковша. 2 ил.
Фиг 2
| Устройство для управления движением ковша-драглайна | 1979 |
|
SU897968A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ автоматического управления процессом копания на одноковшовых экскаваторах и устройство для его осуществления | 1981 |
|
SU977623A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
