1
Изобретение относится к устройствам для управления электрояриводами механизмов, работающих с частными перегрузками и стопорениями, например копающих механизмов экскаваторов, нажимных винтов прокатных станов и др. Такие приводы по технологии работы требуют ограничения упругих динамических усилий, превышающих во много раз статические усилия.
Известны датчики величины усилия в механизме, привод которого вынолнен по системе управляемый преобразователь-двигатель с регуляторами тока и скорости.
В таких датчиках определение момента начала стопорения или торможения и подача сигнала на переключение в систему электропривода Производятся в функции величины и знака производной скорости двигателя-при темпе замедления, превышающем определенное предельное значение. Однако значение производной скорости двигателя является косвенным показателем нагрузки механизма, поскольку последний представляет собой многомассовую динамическую систему. Сигнал, пропорциональный производной скорости двигателя, обычно образуется электрически дифференцированием напряжения тахогенератора, связанного с вало;м двигателя. В составе напряжения тахогенератора наряду с полезным сигналом содержатся пульсации (оборотные, полюсные, зубцовые и др.), фильтрация которых снижает точность дифференцирования, а следовательно, и определения момента начала стопорения. Кроме того, при дискретном изменении структуры или одного из параметров системы уровень ограничения усилия, в механизме зависит от нагрузки. В широком диапазоне изменения нагрузки это может привести к недоиспользованию механизма или недостаточно эффективному ограничению усилия.
Предлагаемый датчик выполнен в виде охваченного цепью отрицательной обратной связи функционального блока, содержащего последовательно включенные интегрирующее и интегро-пропорциональное звенья, ко входу первого из которых, являющегося входом блока, подключен выход датчика тока, а ко входу второго - выход датчика э. д. с. преобразователя.
Таким образом, для определения усилия в механизме использованы регулируемые параметры электропривода, доступные для непосредственного измерения: ток якоря и э. д. с.
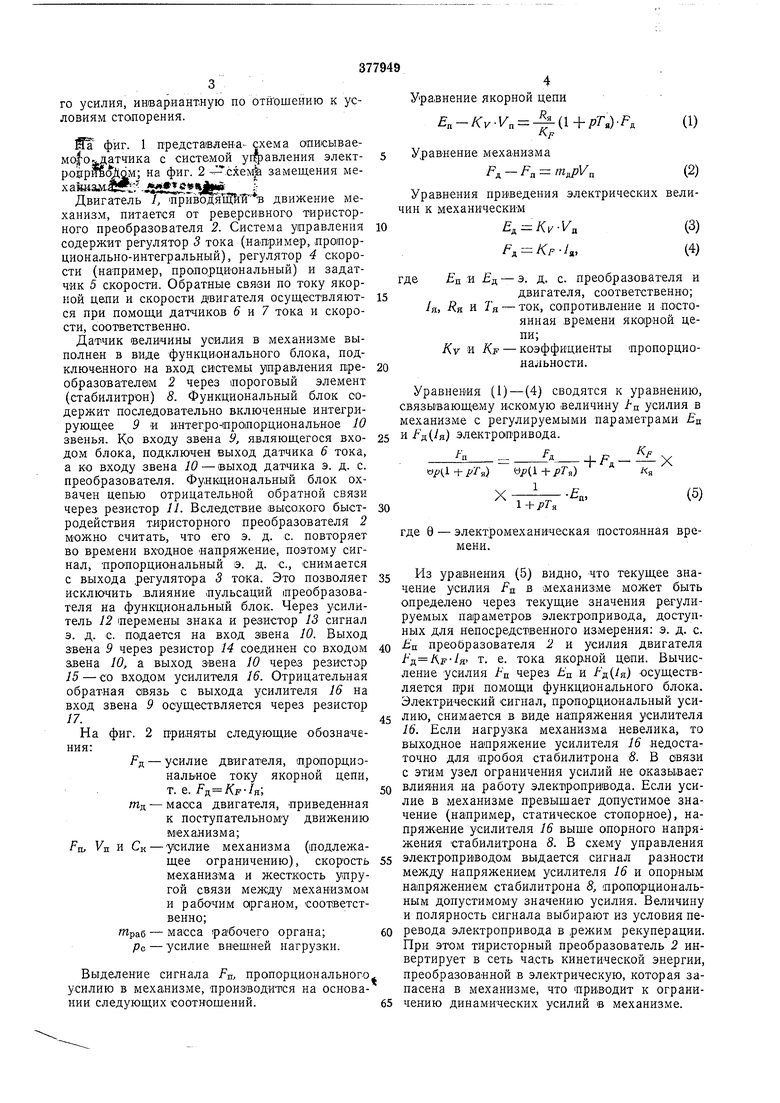
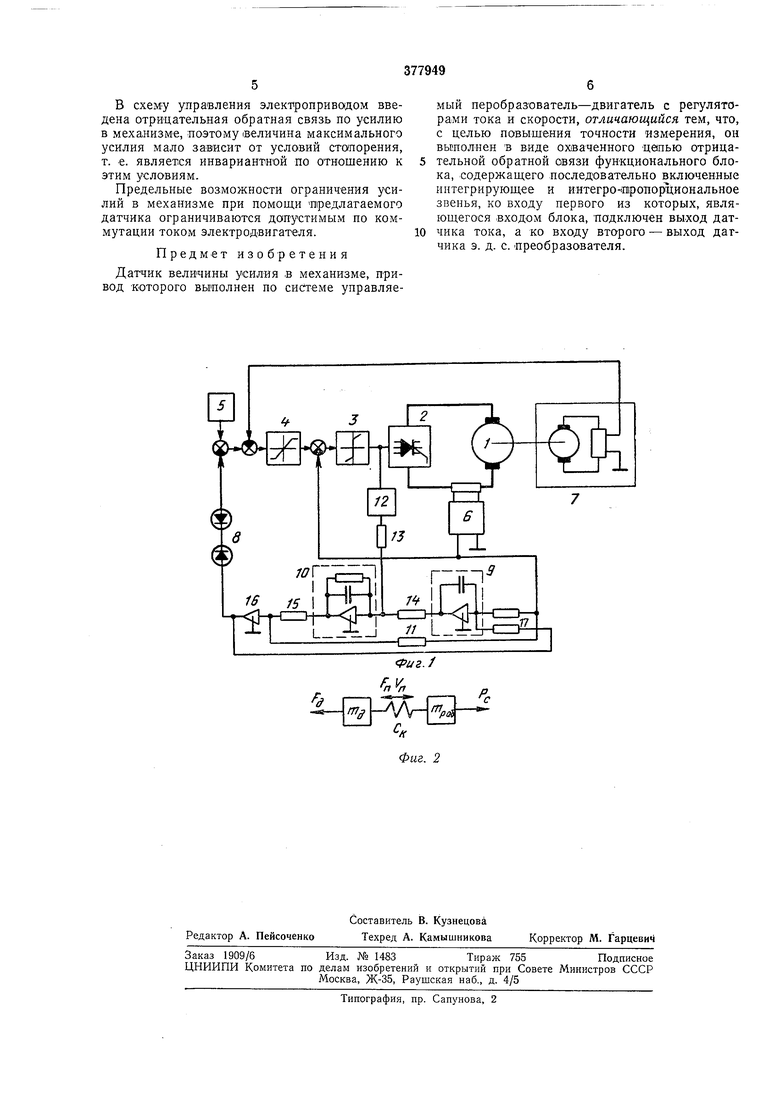
тиристорного преобразователя. Управление электроприводом в функции сигнала, пропорционального усилию, позволяет повысить эффекти вность его ограничения, а введение этого сигнала в систему автоматического регулирования - получить величину максимального усилия, инвариантную ио отношению к условиям стопорения. Rf фиг. 1 предста1влен-а- схема описываемо о атчика с системой убавления электройрт бм; на фиг. 2 -. замещения меX aHH3M.R;v -.4;:ЙЕ1..М - Двигатель 1, 1ПриводяТ цйТ в движение механизм, нитается от реверсивного тиристорного преобразователя 2. Система управления содержит регулятор 3 тока (например, пропорционально-интегральный), регулятор 4 скорости (например, иролорциональный) и задатчик 5 скорости. Обратные связи ио току якорной цепи и скорости двигателя осуществляютСИ ири помощи датчиков б и 7 тока и скорости, соответственно. Датчик величины усилия в механизме выполнен в виде функционального блока, подключенного на вход системы управления преобразователем 2 через яороговый элемент (стабилитрон) 8. Функциональный блок содержит последовательно включенные интегрирующее 9 и интегро-пролорциональное 10 звенья. Ко входу звена Я являющегося входом блока, подключен выход датчика 6 тока, а ко входу звена 10-выход датчика э. д. с. преобразователя. Функциональный блок охвачен цепью отрицательной обратной связи через резистор 11. Вследствие высокого быстродействия тиристорного преобразователя 2 Можно считать, что его э. д. с. повторяет во времени входное Напряжение, поэтому сигнал, пропорциональный э. д. с., снимается с выхода регулятора 3 тока. Это позволяет исключить влияние лульсаций преобразователя на функциональный блок. Через усилитель 12 леремены знака и резистор 13 сигнал э. д. с. подается на вход эвена 10. Выход звена 9 через резистор 14 соединен со входом звена 10, а выход звена 10 через резистор 15-со входом усилителя 16. Отрицательная обратная связь с выхода усилителя 16 на вход звена 9 осуществляется через резистор 17. На фиг. 2 приняты следующие обозначения:д - усилие двигателя, пропорциональное току якорной цепи, т. е. Р Кр-1я, /Ид - масса двигателя, приведенная к поступательному движению механизма; ш п и CK - усилие механизма (лодлежащее ограничению), скорость механизма и жесткость упругой связи между механизмом и рабочим органом, соответственно;траб - масса рабочего органа; PC-усилие вн1ешней нагрузки. Выделение сигнала Fn, пропорционального усилию в механизме, производится на основании следующих соотнощений. Уравнение якорной цепи En-KvV -((1) Уравнение механизма (2) Уравнения приведения электрических величин к механическим (3) f Kp-l,(4) где п и д - э. д. с. преобразователя и двигателя, соответственно; /я, я и 7я - ток, сопротивление и постоянная времени якарной цепи;/СУ и KF - коэффициенты пропорциональности. Уравнения (1)-(4) сводятся к уравнению, связывающему искомую величину д усилия в механизме с регулируемыми параметрами п KVK) электропривода. : V А dp(i+pT) p(i + рТя) где 9 - электромеханическая постоянная времени. Из уравнения (5) видно, что текущее значение усилия Fa в механизме может быть определено через текущие значения регулируемых параметров электропривода, доступных для непосредственного измерения: э. д. с. п преобразователя 2 и усилия двигателя т. е. тока якорной цепи. Вычисление усилия Fa через п и д(/я) осуществляется при помощи функционального блока. Электрический сигнал, пропорциональный усиЛИЮ, снимается в виде напряжения усилителя 16. Если нагрузка механизма невелика, то выходное напряжение усилителя 16 недостаточно для иробоя стабилитрона 8. В связи с этим узел ограничения усилий н-е оказывает влияния на работу электропривода. Если усилие в механизме превышает допустимое значение (например, статическое стопорное), напряжение усилителя 16 выще опорного напряжения стабилитрона 8. В схему управления электроприводом выдается сигнал разности между напряжением усилителя 16 и опорным напряжением стабилитрона 8, пропорциональным допустимому значению усилия. Величину и полярность сигнала выбирают из условия перевода электропривода в режим рекуперации. При этом тиристорный преобразователь 2 инвертирует в сеть часть кинетической энергии, преобразованной в электрическую, которая запасена в механизме, что «приводит к ограничению динамических усилий в механизме.
В схему управления электроприводом введена отрицательная обратная связь по усилию в механизме, поэтому величина максимального усилия мало зависит от условий стапорения, т. €. является инвариантной по отношению к этим условиям.
Предельные возможности ограничения усилий в механизме при помощи предлатаемого датчика ограничиваются допустимым по коммутации током электродвигателя.
Предмет изобретения
Датчик величины усилия в механизме, привод которого выполнен по системе управляемый перобразователь-двигатель с регуляторами тока и скорости, отличающийся тем, что, с целью повышения точности измерения, он выполнен в виде охваченного цепью отрицательной обратной связи функционального блока, содержащего последовательно включенные интегрирующее и интегро-оропорциональное звенья, ко входу первого из которых, являющегося входом блока, подключен выход датчика тока, а ко входу второго - выход датчика э. д. с. преобразователя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления механизмами одноковшового экскаватора | 1988 |
|
SU1602949A1 |
| Способ управления электроприводом одноковшового экскаватора и устройство для его осуществления | 1988 |
|
SU1629423A1 |
| Электропривод постоянного тока с упругой механической связью между электродвигателем и механизмом | 1985 |
|
SU1325654A1 |
| Электропривод постоянного тока | 1984 |
|
SU1228208A2 |
| Устройство для защиты электродвигателя от перегрузки | 1982 |
|
SU1043783A1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| Электропривод постоянного тока | 1978 |
|
SU744883A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1985 |
|
SU1301757A2 |
| Управляемый электропривод постоянного тока | 1974 |
|
SU499554A1 |
| Электропривод | 1982 |
|
SU1084934A1 |
.f
FnVn
PC
