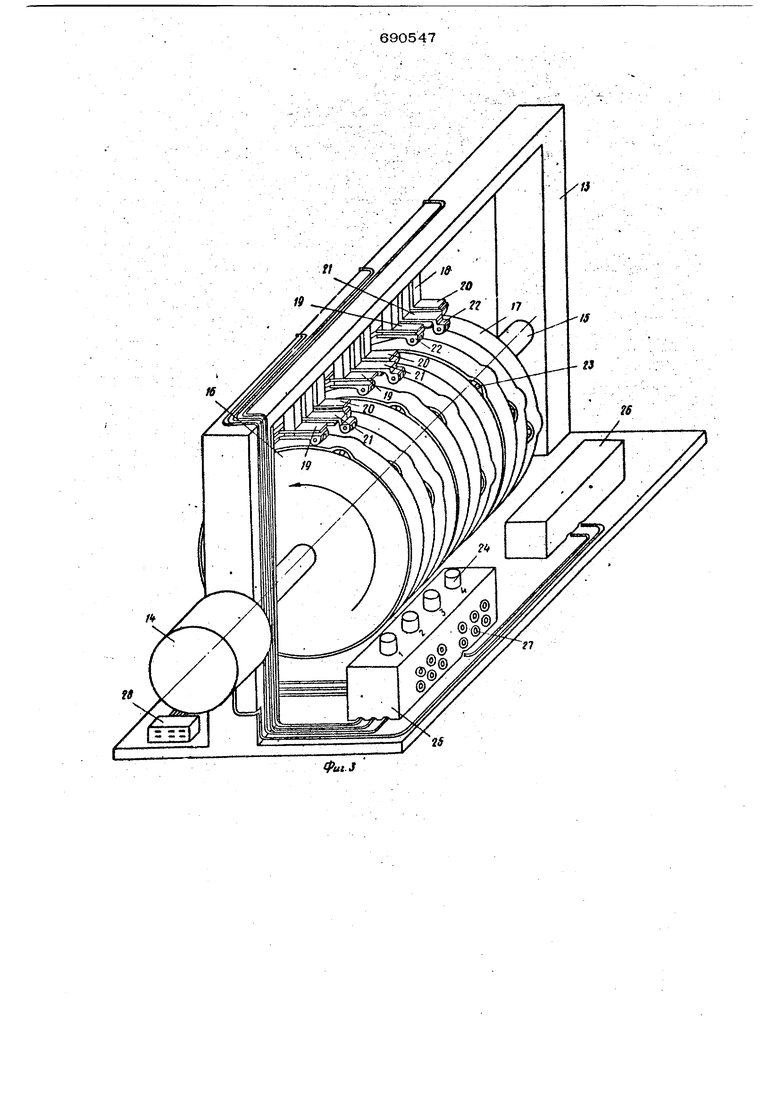
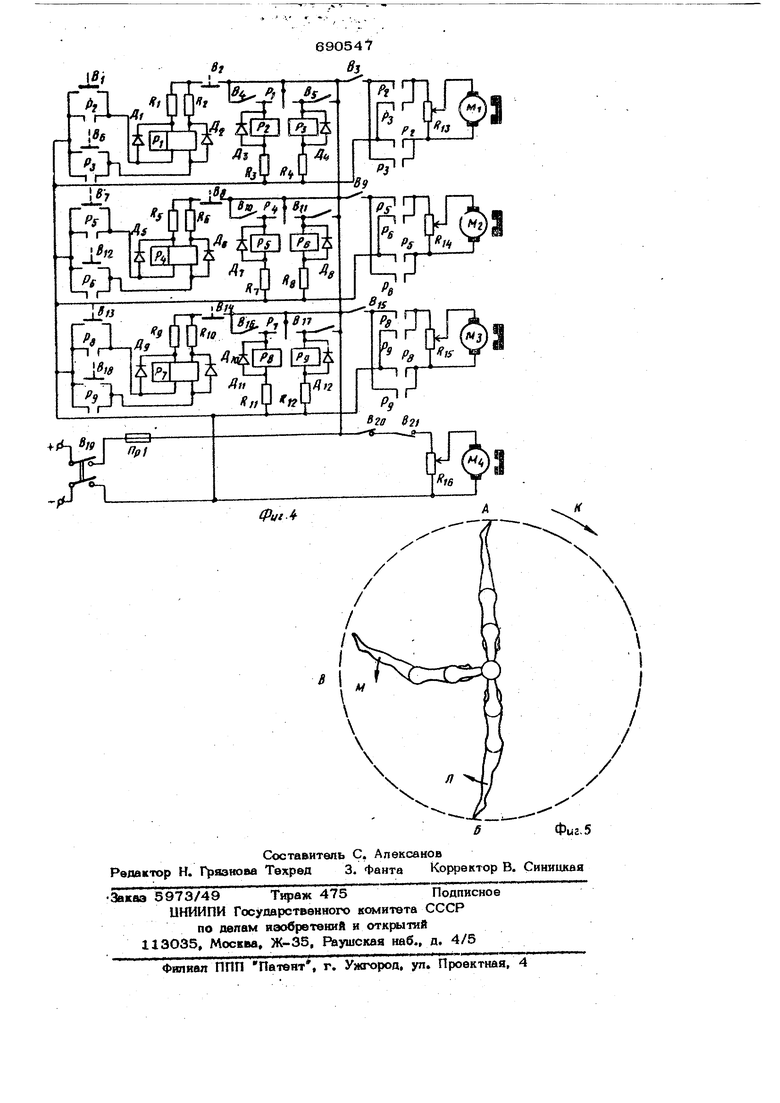
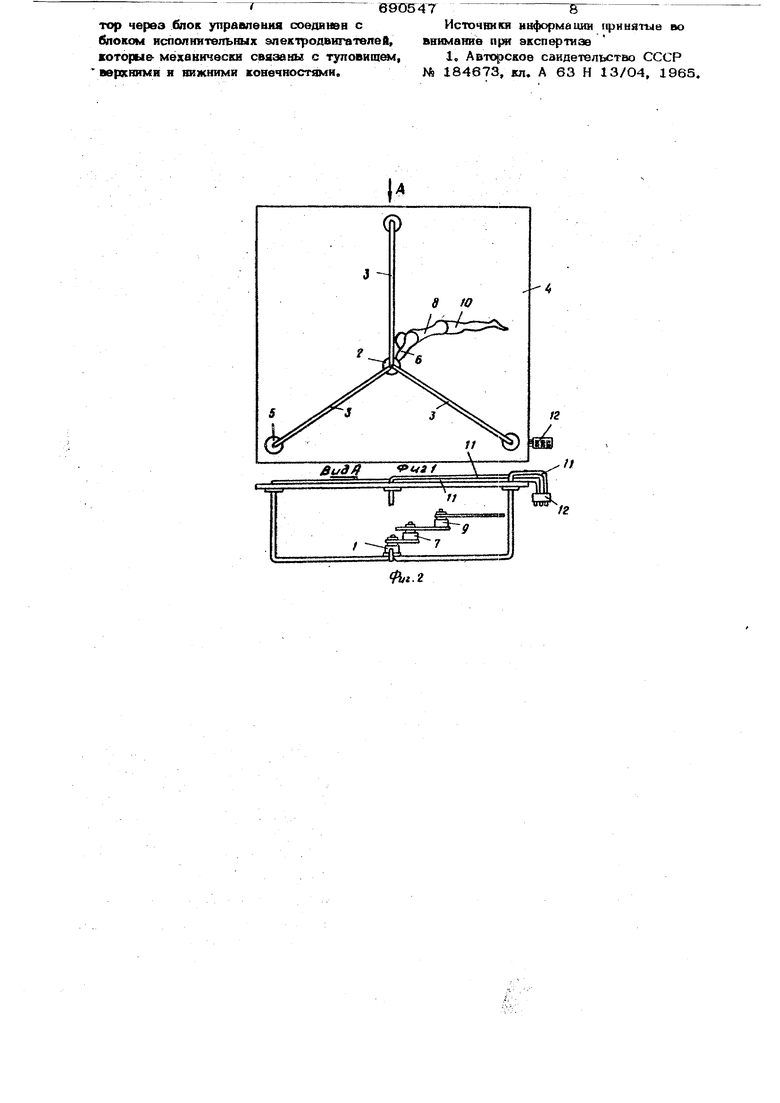
Изобретение относится к наглядным пособиям для демонстрации движений спсртсмена и отдельных его частей при исполнении упражнений на гимнастических снарядах. Известно наглядное пособие для демонстрации движе(шй спортсмена, содержащее макет спортсмена, электродвигатель, блок исполнительных электродвигателей и сеяаанный с ними программатор Cll Недостатком известного наглядного псь собия является невысокая степень автома --.-:.тизаиии процесса демонстрации. Целью настоящего изобретения являетса повышение уровня автоматизации процесса демонстрации гимнастических упр(ажнений. Постаапенная цель достигается тем, что наглядное пособие имеет блок ytipaaлеяия, а макет спортсмена состоит из шарнирно соединенных частей, имитарующих туловище, sepxraie и нижние криочнооти, при этом программатор через блок упраапения соединен с блоком исполннтельных электродвигателей, которые механически связань с туловищем, верхними и нижними конечностями На фиге 1 приведен внешний вид наглядного пособия; нафиг. 2 - ввд по стрелке А фиг. 1| на фиг, 3 - блок-схема управления наглядным пособием; йа фиг. 4принципиальнея схема блока управления; на фи1, 5 - виды гимнастических уп15)ажНениЙ. - , ;.; / ; , . . .V -.V Наглядное пособие для демонстрации движений спортемёна с х;т6«т из электродвигателя 1 (для краткости в ли ьнейшем в тексте иногда вмейто слова .электродвигатель будет использовано обоэнвчеи юю ЭД), который жесткозакреплен на опоре 2, удерживаемой тремя трубчатыми кронштейнами 3, прикрепленнь1мй к демонстрационному щиту 4 с помощью otiop 5, На валу ЭД 1 жестко закреплешд руки е макета. На руках макета в райосю тшеч аакреппен ЭД 7, на валу которого врашавтся часть макета. 8, имитирующая туловище с головой, В рвою очередь, на туловище в районе тазобедренных, сус тавов закреплен ЭД 9, не валу которого вращается часть макета 10, имитирующа нижние конечности. Провода 11, обеспечивающие питание указанных, электродвиг телей, проходят внутри трубчатых кронштейнов 3 и соединены с одной стороны с килкой 12с ножевыми контактами, а другой - с коллекторами .к токосъемшдми щетками электродвигателей 1,7 и 9. а тввже содержат опору 13, на которой закреплен ЭД 14, На вал 15 этого элек тродвигателя насажены девять дисков 16 ва шшиндрические поверхности которых надеты резиновые кольце 17. К горизонтальной части опоры 13 прикреплены с помощью стоек 18 три группы механичео ких репе 19 и 21 с замыкающими конта тами и 2О с размыкающими контактами. Для лучшего проскальаь вания контактов упомянутых реле по поверхности колец 17 применены ролики 22, Е ступья на дисках 16, вааимодейстаующие с контактами механических реле 19-21, образую ся посредством вкладывания стержней 23 между резиновыми кольцами 17 и цилиндрическими поверхностями этих дисков. Регулирование скорости вращеюш валов . электродвигателей 1,7,9 и 14 осуществляется с ручек 24. Под кожухом 25 размещен блок управленчя коммутирующими цепями, которые о спечивают питание электродвягателей. Б,пок питания наглядного пособия расположен под кожухом 26. Для вращения макета, его составных частей и программных дисков использованы электродвигатели постоянного тока, технические характеристики которых обес печивают надежность узлов наглядного пособия. Работой каждого из электродвигателей 1г 7.9 управляет группа из трех дисков 16, располагающихся под группой из трех ;аакрепленных рядом механических реле. В состав указанной релейной групшл входит реле 19, обеспечивающее 1фаще1ше вала электродвигателя в прямом напра&лении, реле 20, служащэе для останова вращения вала, и реле 21, предназшченное для реверсивного ерашения вала. На кожухе блока управления 25 вмеет ся пупът автономного управления 27 работой эпектродвигателей 1,7,9, и 14, иополъ емый при подготовке программы покааываемого yiipaKHeiBbifl.j Кнопки выклю чателей, обозваченвые нщексамв В., Н и С, предназначены для вращения валов электродвигателей в прямом направлении, реверсивном напрввлекии и для останова вращения валов соответственно. Индексами , 2, 3, и 4 обозначены четыре ряда по три кнопки выклкь чателей, обслуживающих электродвигатели 1,7,9 и 14 соответственно. Кнопка В ЭД 14 служит ада ащениа его вала в автономном режиме в направлении, указанном на фиГо 3 стрелкой Т. Кнопка Н ЭД 14 (выключатель В 19, фиг, 4) предназначена для включения и выключения питания всех электродвигателей наглядного пособия Кнопка С ЭД 14 (выключатель В 21 фиг. 4) слуншт для автономного останова ЭД 14, Розетка с контактными гнездами 28 (фиг. 3) служит для коммутации с вилкой 12 (фиг, 1) с ножевыми контактами. Работу узлов и элементов наглядного пособия в автоматическом режиме рассмотрим на примере управления коммутацией цепей питания ЭД 1, вращающего макет (.. помощью трех дисков, которые на фиг. 3изображены поблизости от блока управления 25. Для удобства допустим, что программа коммутации цепей питания ЭД 1 (выступы на дисках 16) уже изготовлена. Нажатием кнопки Н в ряду, обозначенном на пульте управления 4. приводят в действие выключатель В 19 (фиг. 4), При этом В1итючается ЭД 14 (на фиг, 4он обозначен как М 4) и начинается вращение программных дисков 16 в направлении, указанном на фиг, 2 стрелкой Тс Еыступ на диске, расположенном под мехашгческим реле 19 (фиг. 3), проходя под его контактами В 1 (фиг. 4), замыкает их. Поэтому на первую обмотку поляризованного реле Р 1 (фиг. 4) подается напряжение и нейтрально расположенный подвижный контакт реле Р 1 замыкает цепи пи та 1ШЯ обмотки реле Р 2 (фиг. 4). Одна группа замыкающих контактов реле Р 2 блокирует контакты В 1, а две другие группы контактов этого же реле подключают питание к ЭД 1 (на фиг. 4 он обозначен как Ml) для вращения его вала в прямом направлении. После поворота вала ЭД Ml, вращающего макет на требуемый угол, выступ на диске, движущемся под механическим реле 21 (фиг. 3), размыкает контакты этого реле В 2 (фиг. 4). Тем самым прерываются цепи питания поляризованного реле Р1 и его подвижный контакт, переходя в нейтральнов положение, размыкает цепи питания реле Р2. Контакты всех контактнь1Х групп реле Р2 размыкаются и ЭД М1 останавливается. В момент, когда необходимо начать вращение макета в обратном направлении, выступ на диске, расположенном под механическим реле 21 (фиг. 3), замыкает его контакты В 6 (фиг, 4).При том на вторую обмотку попяриаованного реле Р1 подается напряжение и его нейтрально расположенный подвижный контакт замыкает шпи 1литания реле РЗ (фиг. 4), Одна группа замыкающих контактов этого реле блокирует контакты 36, а две другиеподключают питание к ЭДМ 1 для реверсииного вращения его вала. После реверсивяого поворота макета на требуемый угол выступ на диске под механическим реле 21 (фиг. 3) взаимодействует с размыкающими контактами П2 (фиг. 4) этого реле. В результате происходит обесточивание реле Р1 и РЗ, приводящее к остановке ЭД Ml. Аналогичным образом работают в авто матнческом режиме узлы и элементы поco6iT, обеспечивающие фуикшюнкрование электродв сгатепей 7 и 9 (М2 и МЗ на фиг, 4) вращаю1Ш1х н сустаыые части макета. Рассмотрим процесс подготовки наглядного пособия к показу, например, большого оборота .назад на перекладине. Поочередно нахатмая на кнопки В и С электродвигателей 1,7 и 9 на пульте 27 блока управления 25, добиваемся того чтобы тело макета распрямилось, т. е. все части макета составили как бы одну прямую линию, в позиции А стойка на руках (фиг. 5). Манипулируя кнопками В и С ЭД 1, выводим макет из позиции А в позицию Б вис (фиг. 5). На программном диске ЭД 9, вращающемся под механическим реле 19 (фиг, 3) с помощью стержия 23 делаем выступ для замыкания контактов В 13 (фиг. 4) в момент прохождения макетом пози1ади Б, вис. При этом ЭД 9 включится и произведет сгибание в тазобедренных суставах макета (стрелка Л на фиг. 5). Нажимая одновременно то на кнопку В, то на кнопку С ЭД1, и ЭД 14, выводим макет в позицию В (фиг. 5), отстоящую от позиции Б вис на 90 по ходу врвшения макета в упражнении. Автоматика ЭД 9 обеспечит поворот нижних конечностей макета на требуемый угол. Вращением ручки 24 (фиг. 3) добиваемся установки такой скорости вращения ла ЭД 9, при которой к моменту nepexozia макета в позицию В угол между туловищеми нижними конечностями макета составит величину, близкую к 150 . Делаем на диске под механическим р&ле 2О (фиг. 3) выступ, обеспечивающий выключение ЭД 9 по достижении макетом позиции В {фиг. 5)о Немного отступив против направления вращения дисков делаем ка диске под механическим реле 21 (фиг. З) выступ, замыкающий коктакты В 18 (фиг. 4) реверсивного вращения вала ЭД 9, при котором обучаемому демонстрируется разгиба1те.в тазобедренных суставах макета. Одновременно, нажимая то на кнопки В, то на кнопки С ЭД 1 и ЭД 14, выводим в позицию А (фиг, 5) стойка на руках . Автоматика ЭД 9 обеспечит разгибание нижних конечноетей макета до полного распрямления тела по достижении макетом позиции стойка на руках (стрелка М на фиг. 5). . Далее таким же образом готовitM программу сгибательных и разгибательных движений в плечевых суставах макета, осуществляемых ЭД 7 при прохождении макетом позиций- Б и В (фиг,5), Последней операцией наладки программы пособия является выведение макета в исходную позицию А стойка на руках и выполнение на диске под механическим реле 19, обслуживающим ЭД 1, выступа. включающего пита1ше ЭД 1 сразу же после нажатия кнопки Н ЭД 14 (выключатель В 19 на фиг. 4), запускающей автоматический показ упражнения. Для прекраи1рнйяпоказа необходимо нажать кнопку Н ЭД 14 (разомкнуть контакть В 19 на фиг. 4). Формула иаоб.ретения Наглядное йособке для демонстрации движений спортсмена, содержащее макет спортсмена, электродвигатель, блок испопнитвльных электродвигателей и связанный с ними программатор, о т л и ч а кн щ е 8 с я тем, что, с повышения уровня автоматизации процесса демонстрашш гимнастических упражнений, оно имеет блок управления, а мак1вт спортсмв на состоит из шарнирно соединенных частей, имитирующих туловище, верхние и нижние конечности, при этом программатор черва бпоЕ управления схкэдинев с блоком исполнитвлъЕШх электродвигателей, кото{ ы& мёхвиически связаны с тупоьящем, вврквимн н нижними конечностями.
Источники ннформаиии сфиыятие во внимание п{ж акспер-гаае
1, Авторское саидетельство СССР № 184673, кп. А 63 Н 13/04, 1965.
| название | год | авторы | номер документа |
|---|---|---|---|
| Наглядное пособие для изучения работы трехфазной синхронной машины | 1989 |
|
SU1727151A1 |
| Устройство для тренировки спортсменов | 1988 |
|
SU1523152A1 |
| Устройство для программного управления автооператором гальванической линии | 1985 |
|
SU1273880A1 |
| Учебный прибор по физике | 1990 |
|
SU1720069A1 |
| УСТРОЙСТВО ДЛЯ СБИВАНИЯ МОЛОЧНОГО СЫРЬЯ И ОБРАБОТКИ МАСЛЯНОГО ЗЕРНА | 1993 |
|
RU2063127C1 |
| Устройство для повышения энергоэффективности асинхронного электропривода | 2020 |
|
RU2748215C1 |
| Противоугонное устройство транспортного средства | 1987 |
|
SU1516399A2 |
| Учебный прибор по физике | 1981 |
|
SU1005161A2 |
| ТРЕНАЖЕР | 1992 |
|
RU2067468C1 |
| ГИМНАСТИЧЕСКИЙ ТРЕНАЖЕР ДЛЯ ТЯЖЕЛОЙ АТЛЕТИКИ | 2021 |
|
RU2794297C1 |