ю «vj
со
00 00 « Изобретение относится к позиционным устройствам автоматического уп равления циклически работающими транспортными средствами, в частности автоматическими гальваническими линиями обработки печат1й1х плат. . Цель изобретения - упрощение и по надежйости устройства. На фиг.1 представлена структурная схема устройства; на фиг.2 - принципиальная электрическая схема устройства. Устройство содержит программатор 1, блок 2 сравнения, блок 3 горизонтального перемеа ения, блок 4 вертикального перемещения, блок 5 считыва ния и сброса, блок б адресных датчиков, датчик 7 точного останова, датчик 8 верхнего полол ения5 датчик 9 положения и датчик 10 занятости позиций. Программатор содер кит электромагнит 11 трансмиттера для переключения муфты в трансмиттере, электродвигатель 12 трансмиттера, механическую тягу 13 электромагнита с мзФтой 14 для передачи движения от электродвигателя 12 к кулачковому валу для передвижения перфоленты 15 на один шаг и включения контактов 16-20 согласно двоичному коду заданного адреса. Блок 2 сравнения содержит первую группу реле считывания и запоминания заданного адреса с контактами: реле 21 с контактами 2 - 2Ь, , реле 22 с контактами 22, - , реле 23 с контактами 23 ( - , реле 24 с контактами 241 - 244, 25 с контактами 25( - 25, вторую группу реле позиций с контактами: реле 26 с контактами 26J - реле 27 с контактами 27, - 274, реле 28 с контактами 28( 284, реле 29 с контактами 29 ( - реле 30 с контакта:ми 30 304. Блок 3 горизонтального перемещения содержит третью группу реле с контактами, реле 31 точного останов с кoнтaктa ш 31, 31, реле 32 движения Вперед с контактом 32,, рел 33 совпадения адреса с контактом 33 реле 34 движения Назад с контакто 34. Блок 4 вертикального перемещения содержит четвертую группу реле с контакта ш: реле 35 верхнего поло жения с контактами 35, 35, реле 36 нижнего положения с контактами 36), 36J, реле 37 занятости позиций 80 с контактом 37f , пятую группу реле с контактами: реле 38 двкясения Вниз с контактами 38,,. 38, реле 39 движения Вверх с .контактами 39|, 39. Блок 5 считывания и сброса содержит шестую группу реле с контактами: реле 40 с контактами 40,, 40, реле 41 с контактами 41, , 41, реле 42 с контактами 42.., , 42, а также содержит диод ,43, конденсатор 44, транзистор 45, резистор 46 и кнопку 47. Блок 6 адресных датчиков содержит адресные датчики 48-52. Все бесконтактные индуктивные датчики расположены на автооператоре, а шины, от которых срабатывают адресные датчики, расположены над позициями. Шина датчика точного останова короче адресных шин. Датчик 10 занятости- позиций срабатывает от шин, расположенных на штангах. Устройство работает следующим образом. Кнопкой 47 подается первоначальШзгй импульс на кратковременное включение электромагнита 11 трансмиттера, который через механическую тягу 13 и 1 1уфту 14 передает вращение электродвигателя 12 трансмиттера кулачковому валу, замыкающему контакты 16-20 трансмиттера и передвигающему перфо-. ленту 15 на один шаг, соответственно двоичному коду адреса срабатывают реле 21-25, которые блокируются соответственно контактами 21,, 22, 23, 24,, 25, и замьшают свои нормально разомкнутые контакты 21,, 22, 23, t 24,, 25,. На схему сравнения и выбора направления горизонтального движения, состоящую из определенного сочетания контактов реле позиций 26-30 и реле считывания и запоминания заданного адреса 21-25, подается плюс источпика питания. Например, автооператор находится на первой позиции, что соответствует двоичному коду 0001, при котором возбуаэден датчик 48. Реле 26 срабатьшает, размыкает свои контакты 26,, 26 и замыкает контакты 262, 26i), Через контакты схемы сравнения 212, 26/2 получает питание реле 32 Вперед и блокируется своим нормально открытым контактом 32j. Автооператор начинает перемещаться вперед, датчик 48 отключается, выключается и реле 26. Пусть задан программой 3 адрес пятой пдзиций, что соответствует коду 00100, при котором включается реле 23, контакты 232 P змыкаются,.контакты 23 замыкаются. Как только ацтооператор достигнет пятой позиции, возбуждается датчик 50, срабатывает реле 28, которое замыкает контакты 282, 28, Через контакты 284, 24,, 21, 26 f, 22, 27j, 23. 29,, 252, 30, подучает питание реле 33 совпадения, замыкаются его контакты 33, . При возбуждении датчика 7 точного останова срабатывает реле 31, которое обрывает своими нормально замкну тыми контактами 31 ( цепь блокировки горизонтального передвижения автоопе ратора вперед. Реле 32 отключается, автооператор останавливается, а так как контакты 312 реле 3 замыкаются, то поступает питание на блок 4 верти кального перемещения. Если штанга автооператора находит ся вверху, то.датчик 8 верхнего поло жения возбуждается, контакты 35( реле 35 размыкаются, а контакты 35 за мыкаются. Реле 38 опускания срабатывает и блокируется контактами 38. Штанга автооператора начинает перемещаться вниз и, как только она достигнет своего крайнего нижнего положения, возбуждается датчик 9 нижнего положения, который контактом 36( реле 36 размьп :ает цепь реле 38, штанга перестает- перемещаться вниз. Реле 40 получает питание, замыкаются его контакты 40| и размыкаются контакты 402 срабатывает реле 41, замыкаются его контактны 41.), 41г. При прекращении перемещения, т.е. при отключении реле 38, размыкаются контакты 38, отключается реле 40, замыкаются его контакты 40. и реле 42 включается, а конденсатор 44 заря жается через диод 43. При включении реле 42 размыкаются контакты 42, ко торые отключают блок вертикального перемещения, размыкаются контакты 42, которые сбрасывают адрес в блоки 5 считывания и сброса, т.е. реле 23 отключается, размыкаются его контакты 23, отключается реле 33, размыкаются его контакты 33, отключается реле 31, размыкаются его контакты З которые отключают минус источНИка питания от блока 5. Конденсатор 44 разряжается на электромагнит II через транзистор 45.. Электромагнит 80 4 11 включается кратковременно и происходит перемещение перфоленты 15 на шаг, а контакты 16-20 трансмиттера включают реле согласно новому коду щреса. Затем работа устройства повторяется. Если позиция, на которую пришел автооператор, занята, то датчик 10 возбуждается, включает реле 37, размыкаются контакты 37 и реле 38 опускания штанги не включается. Устройство позволяет работать по любой ясесткой циклограмме. Предложенное устройство по сравнению с известными упрощено за счет кодирования адресов программы на замкнутой перфоленте в двоичной системе, получена возможность быстрой смены программы на любой технологический процесс. Формула изобретения 1. Устройство для программного управления автооператором гальванической линии, содержащее блок сравнения, блок горизонтального перемещения, блок вертикального перемещения, датчики верхнего и нижнего положения автооператора, о т л и ч а ющ е е с я тем, что, с целью упрощения и повышения надежности устройства, в него введены программатор, блок считывания и сброса, датчик точного останова, датчик занятости позиций и блок адресных датчиков, первые выходы которого подключены к первым входам блока сравнения, второй вход которого соединен с выходом программатора, подключенного входом через блок считывания и сброса к выходу блока вертикального перемещения, соединенного первым, вторым, третьим и четвертым входами с выходом блока горизонтального перемещения, датчиами верхнего и нижнего положения автооператора и датчиком занятости озиций соответственно, блок сравнения выходами Вперед и Назад подлючен соответственно к первому и торому входам блока горизонтального еремещения, соединенного третьим ходом через датчик точного останоа с выходом Ровно блока сравнения. . 2. Устройство по п.1, отлиающееся тем, что программаор вьшолнен в виде трансмиттера тееграфного аппарата.
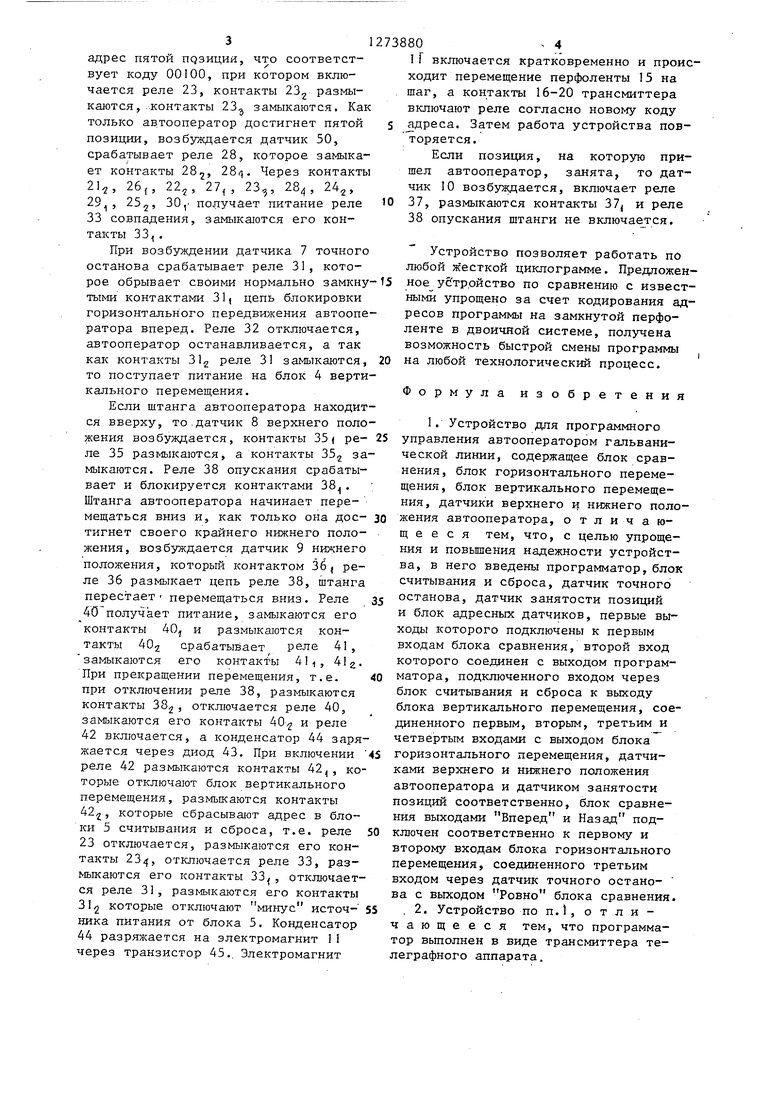
Изобретение относится к позиционным устройствам автоматического управления циклически работающими транспортными средствами, в частности автоматическими гальваническими линиями и линиями обработки печатных плат. Целью изобретения является упрощение и повьшение надежности устройства. Устройство для программного управления автооператором гальванической линии содержит программатор, блок сравнения, блок горизонтального перемещения, блок вертикального перемещения, блок считывания и сброса, датчик точного останова, датчик занятости позиций, блок адресных датчиков и датчик верхнего и нижнего положений автооператора. Устройство I позволяет работать по любой жесткой циклограмме. 1 з.п. ф-лы. 2 ил. (Л
| Устройство для управления авто-ОпЕРАТОРАМи гАльВАНичЕСКиХ лиНий | 1978 |
|
SU807221A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для управления подъемно-транспортным механизмом | 1978 |
|
SU959037A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
