(54) ПОПЛАВКОВЫЙ .УРОВНЕМЕР
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения уровня жидкости | 1980 |
|
SU861955A1 |
| УСТРОЙСТВО для РЕГУЛИРОВАНИЯ УРОВНЯ жидкостив | 1965 |
|
SU173153A1 |
| ПОПЛАВКОВЫЙ УРОВНЕМЕР | 1992 |
|
RU2062875C1 |
| Устройство для дозирования и увлажнения концентрированного корма | 1981 |
|
SU1009355A1 |
| Клещи для вытаскивания болванок из изложниц | 1940 |
|
SU61522A1 |
| ГИДРОПОДКОРМЩИК ДЛЯ ОТКРЫТЫХ ОРОСИТЕЛЬНЫХ СИСТЕМ | 1991 |
|
RU2092011C1 |
| ПНЕВМАТИЧЕСКАЯ ЛЕБЕДКА | 1999 |
|
RU2157333C1 |
| Поплавковый уровнемер | 1990 |
|
SU1767355A1 |
| ПРИБОР ДЛЯ УЧЕТА РАСХОДА ЖИДКОГО ТОПЛИВА | 1929 |
|
SU25292A1 |
| Уровнемер | 1990 |
|
SU1755056A1 |
Изобретение относится к технике, измерения уровня жидких продуктов и может быть использовано в автоматизированных системах управления технологическими процессами, .особенно там, где предъявляются высзоки требования к искробезопасности и взрывозащищенности.
Известны поплавковые уровнемеры, содержащие поплавок, привОд в виде пружинного двигателя постоянного момента, гибкий связующий элемент, мерный барабан и устройство отсчёта уровня, при этом привод размещен внутри поплавка и связан с мерным барабаном гибкой стальной магнитной проволокой, снабженной магнитной записью кварцованной частоты и нитными головками, сдвинутыми одна относительно другой 1.
Однако этот уровнемер имеет ограниченный диапазон измерения.
Наиболее близким по технической сущности к предложенному является поплавковый уровнемер с пружинным уравновешиванием, состоящий из двух секций, полностью изолированных одна от другой. С внутренним объе-. мом емкости связана только механическая секция, в которой имеется барабан с намотйнн.ым стальным тросиком, к концу которого прикреплен поплавок. Во второй секции барабана размещены пружинный двигатель, местный индикатор, гидравлический тормоз и ручной механизм подъёма поплавка. В автоматическом режиме подъем поплавка осуществляется электроприводом
0 2. ,-. -
Однако наличие в механизме подъема электропривода может.привести к иск рообразовани, что недопустимо на таких объектах/ как нефтеналивные
5 судна.
Цель изобретения - повышение безопасностии надёжности измерения.
Это достигается тем, что в поплавковом уровнемере ме.ханизм подъема
0 поплавка снабжен пневмоцилиндром двухстороннего действия, шток которого выполнен в виде зубчатой рейки, входящей в зацепление с зубчатнм Колесом со: сквозным осевь1м отвер5стием, храповым механизмом, рычаг ведущей собачки которого жестко связан сб ступицей зубчатого колеса, а вал храпового колеса свободно проходит через сквозное осевое отверстие
0
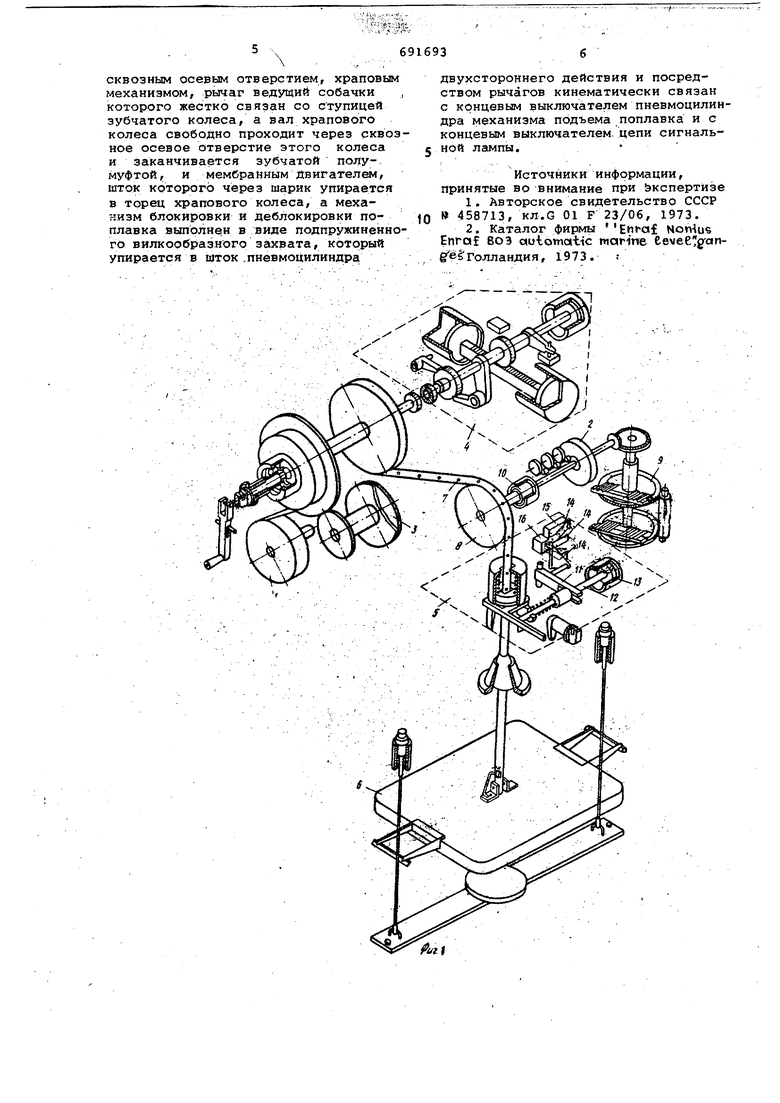
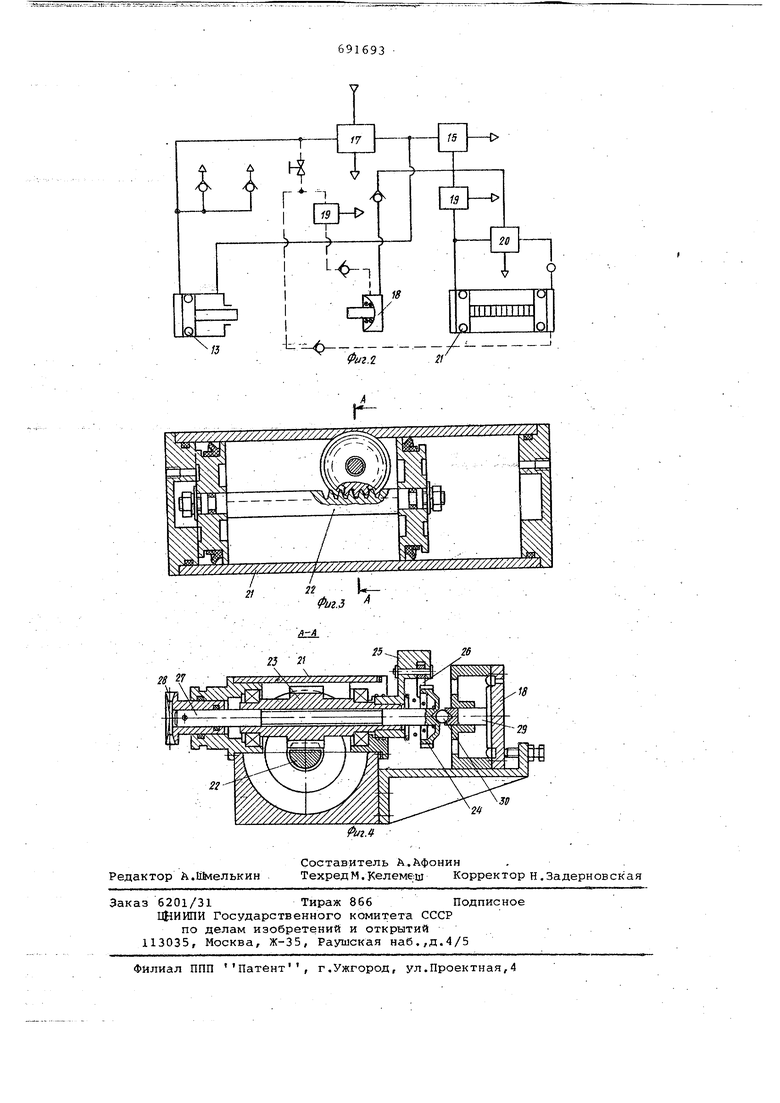
691693 этого колеса и заканчивается зубчато муфтой, и мембранным двигателем, шток которого через шарик упирается в торец храпового колеса. Механизм блокировки и деблокировки поплавка выполнен в виде подпружиненного вилкообразного захвата, который упирает ся в шток пневмоцилиндра двухстороннего действия и посредством рычагов кинематически связан с концевым выключателем пневмоцилиндра мехамизма подъема поплавка и с концевйм выключателем цепи сигнальной лампы. Нафиг.1 изображена кинематическая, схема поплавкового уровнемера с пружинным-уравновешиванием и дистанционным пневмоуправлением; на фиг 2 - схема управления уровнемером; на фиг.3 - механизм подъема поплавка йа фйг.4 - то же, разрез А-А на фиг Уровнемер содержит пружинный дви. гатель 1, местный счетчик 2, гидравл ч ее кий тормоз 3, механизм 4 подъема поплавка, механизм 5 блокировкой дёблЬйГйрбвки поплавка, поплавок ё, Мерную- ленту 7, мерный шкив 8, преобразователь 9 угол-код,концентрй- ческую магнитнуто муфту 10. Механизм блокировки и деблокировки.поплавка в свою очередь состоит из вилкообра його захвата 11, штока 12 пневмодилиндра, пневмоцилиндра 13 спуска, .; рычагов 14, лневмокнопки 15 и микро переключателя 16. Схемауправления уровнемером (фиг.2) состоит из пиёв мокнопки 15, крана управления 17, мембранного;двигателя 18, генераторов 19 пбдъеяа, инвертора 20, пневмЬцилйндра 21 подъема и пневмоцилин ilpa.lS спуска. Механизм пЬд-ёёмй поплйвка (фиг .З и фиг.4) состоит из пневмоцилиндра 121 двухстороннего деййт вия шТока в виде зубчатой рейк 22, зубчатого колеса 23, храпрйого механизма 24, рычага 25, собачки 26 ведущей, вала 27 храпового колеса, зубчатой полумуфты 28, мембранного Двигателя 29 и шарика 30. Уровнемер в режиме подъема и бло кировки поплавка работает слелуйййм образом. -. .; . ... При установке рукоятки ;.крана 17 управления в положение подъем давле . ние воздуха .проходит через нормально открытугр пневмокнЬпку 15 в мембранный двигатель 18 иодйовременно включае.т генератор 19 подъема. Во врем5i. импульса давления генерато ра 19 пневмоцилиндр 21-совершает рабочий шаг, поднимая поплавок б. Во время паузы генератора 19 через инвертор 20. пневМоцйлиндр 21 возвра щается в исходное положение. Поцла вок же 6 не успевает опуститься на прежний уровень,так как его движение вниз тормозится гидротормозом 3 и самим пневмодвигателем. С очередным импульсом давления все повто-I ряется. Линия спуска в это время соединена через кран управления 17 с атмосферой. Ступенчатый подъем поплавка 6 продолжается до тех пор, пока не сработает вилкообразный захват 11, который через систему рычагов и пневмокнопку 15 отключает пнеймоцилиндр подъема 21 и мембранный двигатель 18. Полумуфты 28 зубчатые разъединяются под действием . .пружины, пневмЪцилиндр останавливается. Одновременно рычаги замыкают цепь сигнальной лампы. В режиме спуска у ровнемер работает cJ:Ieдyющим образом. При повороте рукоятки крана 17 управления в положение спуск давление воздуха поступает в поршневую полость пневмоцилиндра 13 деблокировки поплавка. Поплавок 6 освобождается от вилкообразного захвата 11 и подсобственным весом опускается на поверхность продукта . Ограничение скорости спуска п эойсходит за счет гидротормоза 3. При утечке или испарении тормозной жидкости из гидротормоза 3 спуск поплавка 6 может осуществляться с i йрмощью пневмоцилиндра. Рукоятка краНа управления 17 устанавливается в положение спуск, давление воздуха поступает в поршневую по. пневмоцилиндра 13 деблокировки поплавка. Поплавок 6 освобождается от вилкообразйого захвата 11 и под собственньм весом начинает опускаться. Одновременно воздух поступает ца пневмогенератор спуска 19, которой чередуя импул15сы давления с паузайи, посрёд-. ст.вом мембранного двигателя 18 включает и отключает муфту сцепления 10, Во время отключения муфты 10 попла.вок под собственным весом опускается до момента включения муфты. Задающей частотой спуска является частота геЙёратЬра7 Пневмоцилиндр 21 подъема выполняет в это время роль тормоза. Линия подъема при этом через кран управления соединена с атмосферой. Формула изобретения Поплавковый уровнемер, содержащий поплавок, механизм подъема поплавка, механизм блокировки и деблокировки поплавка, уравновешивающий пружиннь1й двигатель, местный счетчик, кинематически связанный с аналого-цйфровйм преобразователем, и гидравлический тормоз, отличающийс я тем, что, с целью повышения . безопасности и надежности измерения, механизм подъе.ма/ Поплавка снабжен пневм оцилиндром двухстороннего действия, шТок которого.выполнен в виде зубчатой рейки, входящей в зацепление с зубчатым колесом со
сквозным осевым отверстием, храповым механизмом, рычаг ведущий собачки , которого жестко связан со ступицей зубчатого колеса, а вал храпового колеса свободно проходит через сквозное осевое отверстие этого колеса и заканчивается зубчатой полумуфтой, и мембранным Двигателем, шток которого через шарик упирается в торец храпового колеса, а механизм блокировки и деблокировки поплавка выполнен в виде подпружиненного вилкообразного захвата, который упирается в JUTOK .пневмоЦилиндра
691693
двухстороннего действия и посредством рычагов кинематически связан с концевым выключателем пневмоцилиндра механизма подъема поплавка и с концевым выключателем, цепи сигнальной лампы.
Источники информации, принятые во внимание при Экспертизе
Л
