Основным требованием, предъявляемым к кранам, обслуживающим мартеновские цехи металлургических заводов с конвейерным процессом заливки стали в изложницы, расположенные на вагонетках, является их высокая производительность.
У применяемых для этой цели кранов управление клещами для вытаскивания болванок из изложниц обычно ручное, что сильно ограничивает их производительность. В целях устранения этого неудобства предлагалось оборудовать кран клещами для вытаскивания в виде щарнирно подвешенных к обойме стрипперного механизма рычагов, управляемых гибким тросом от барабанной лебедки. Механизация управления клещами стрипперных кранов также уже предлагалась. Но в известных конструкциях этого рода привод клещей устанавливается, например, непосредственно на висящем в шахте стрипперном механизме или же на раме тележки устанавливается самостоятельный привод с многощарнирным механизмом, совмещенным со специально создаваемым для этого канатным полиспастом. Такие устройства, помимо своей сложности, базируются в основном на введении дополнительного с отдельным электродвигателем механизма различной конструктивной и кинематической сложности. В отличие от этого в предлагаемых клещах для захвата изложниц применены звенья, которые щарнирно прикреплены к обойме стрипперного механизма и сочленены с рычагами и гибкими тросами, идущими к барабанной лебедке. Этим достигается обеспечение последовательности непрерывного выполнения операций: сближения клещей для захвата изложницы и подъема стрипперного механизма.
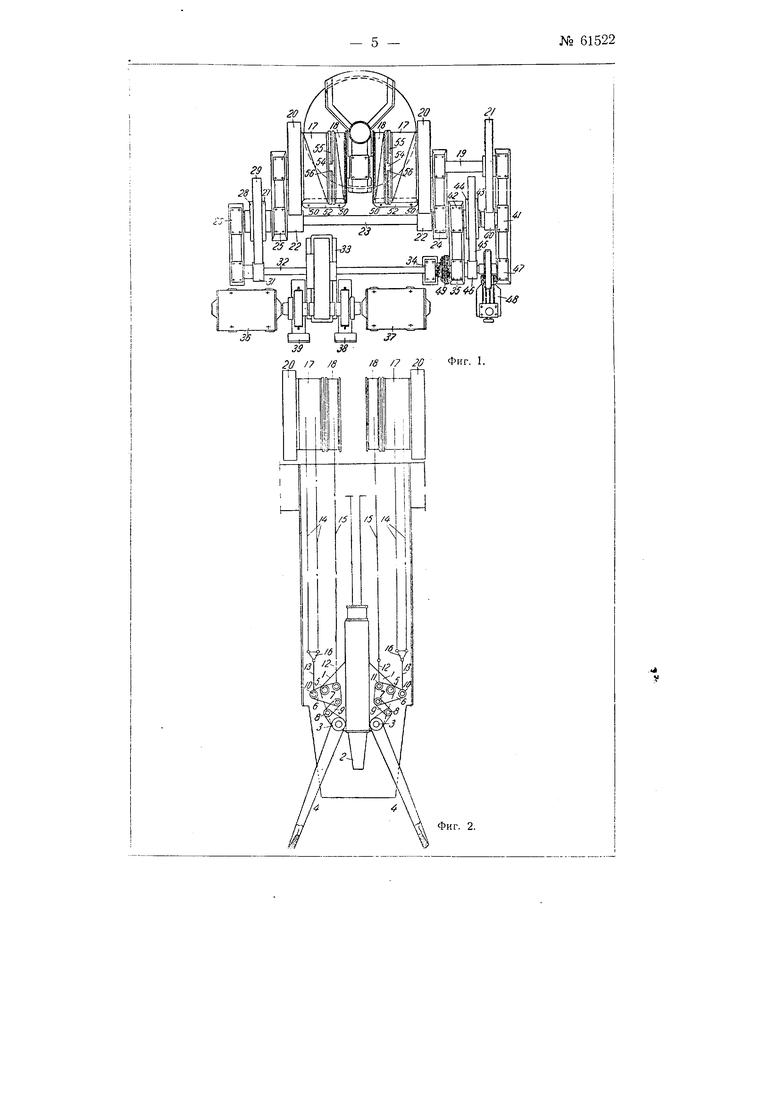
На фиг. 1 изображен общий вид механизма; на фиг. 2 - клещи с частичным разрезом рычагов; на фиг. 3 - вид клещей сбоку.
В ребрах обоймы / стрипперного механизма 2 (фиг. 2) закреплены оси 3 рычагов 4 и оси 5, на которых вращаются звенья 6. Звенья 6 посредством шарниров 7 через тяги 9 и шарниры 8 соединены с рычагами 4. Через шарниры 10, 11 и тяги 12 и 13, звенья 6 подвещены к гибким тросам 14 и 15. Тросы 14 соединяются с тягой 13 при помощи обоймы 16. Нижние концы тросов 14 и 15 закреплены на коушах с помощью канатных зажимов. Вверху
тросы 14 закреплены на крайних барабанах 17, а тросы 15 - на средних барабанах 18 (фиг. 1 и 2). Барабаны 17 (фиг. 1) свободно установлены на валу барабанов 19 и на них закреплены зубчатые венцы 20. Барабаны 18 и их зубчатое колесо 21 на валу 19 закреплены шпонками. Зубчатые венцы 20 (фиг. 1) находятся в зацеплении с шестернями 22, закрепленными на валу 23, который установлен на подшипниках 24, 25 и 26. Между подшипниками 25 и 26 на валу 23 закреплены два храповика 27 и 28, между которыми на их ступицах свободно на втулке установлено зубчатое колесо 29.
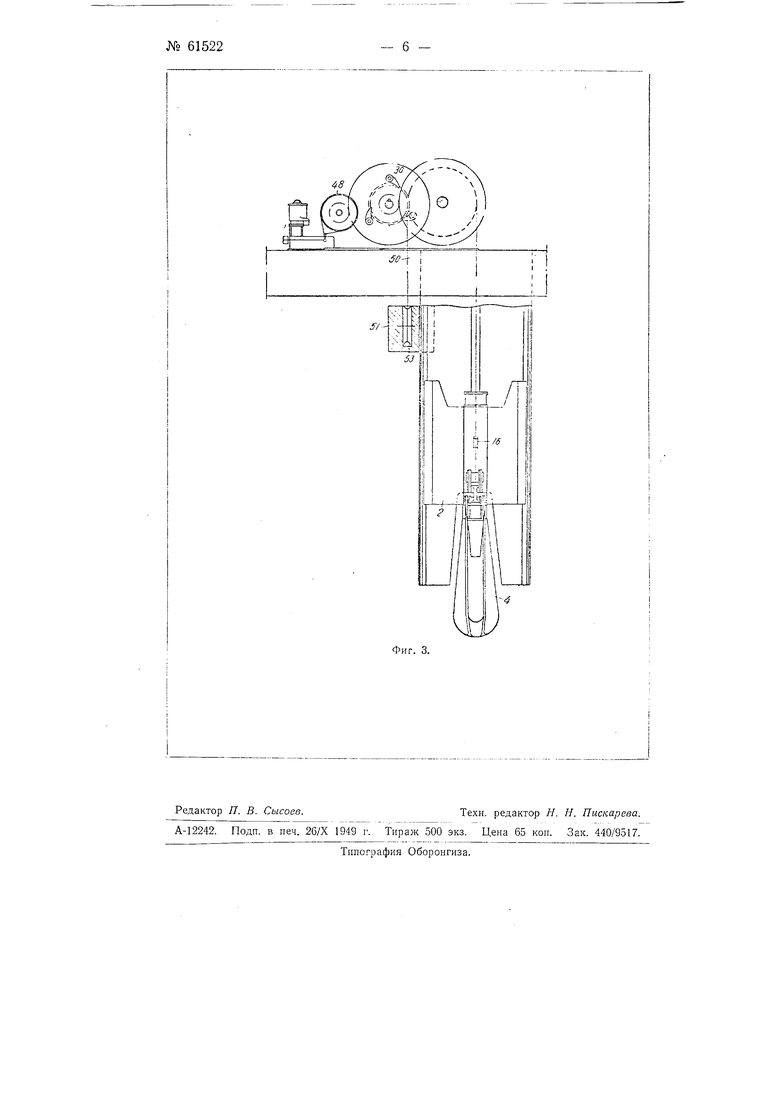
С обеих сторон зубчатого колеса 29 на его диске закреплено по три собачки 30 (фиг. 3), сцепляющихся с храповыми колесами 27 и 28. Зубчатое колесо 29 находится в зацеплении с шестерней 31, закрепленной на валу 32, который проходит через одноступенчатый редуктор 33 к подшипнику 34. Конец вала 32 находится между подшипниками 34 и 35. Между редуктором 33 и двигателями 36 и 37 установлены тормоза 38 и 39. Перечисленные выше элементы представляют в своем взаимодействии механизм подъема.
Необходимо иметь два электродвигателя и два тормоза ввиду большой мошности крана и больших скоростей подъема. Для кранов средних мощностей требуются механизмы с одним двигателем и в целом краны будут иметь более простую компоновку всего изображенного на фиг. 1 механизма при той же принципиальной схеме.
Если рассматривать правую часть механизма, изображенного на фиг. 1, то можно видеть, что зубчатое колесо 21 находится в зацеплении с шестерней 40, которая закреплена на валу, установленном на подшипниках 41 и . На этом же валу закреплены два храповика 43 я 44 и так же, как зубчатое колесо 29, на ступицах храповиков 43 и 44 свободно установлено зубчатое колесо 45, на котором, так же, как и на колесе 29, с обеих сторон диска имеется по три собачки 30. Зубчатое колесо 45 находится в зацеплении с шестерней 46, которая закреплена на валу, установленном на подшипниках 47 и 35. Рядом с шестерней 46 закреплена тормозная шайба тормоза 48. Между подшипниками 35 и 34 установлена электромагнитная муфта 49.
Барабаны 17 и 18 располагаются так, чтобы тросы 14 и 15 имели направление, касательное к их окружности (фиг. 2). С диаметрально противоположной стороны с барабанов сбегают четыре закрепленных одними концами на барабанах 17 гибких троса 50, которые проходят сквозь раму в окна 52 и, охватывая блоки 53 противовеса 51, закрепляются вторыми концами на барабанах 18. Зубчатые колеса 21 и 40, 45 и 46, а также храповики 43 и 44, имеют соответственно один и тот же модуль и число зубьев такое , как и зубчатые венцы 20, шестерни 22, зубчатые колеса 29 н 31 и храповики 27 и 28.
Изложницы захватываются рычагами 4 посредством работы на подъем крайних барабанов 17 при заторможенных средних барабанах 18. Захват изложницы н подъем происходят непрерывно, без потери времени на переключение механизмов. Рычаги 4 раскрываются посредством работы крайних барабанов 17 на снуск при заторможенных средних барабанах 18.
Все три тормоза 38, 39 и 48 при выключении тока затормаживаются одновременно. Тормоз 48 имеет дополнительное управление посредством переключателя, сблокированное с электромагнитной муфтой 49, дающее возможность самостоятельно управлять тормозом 48.
При заторможенном тормозе 48 муфта 49 всегда находится в нерабочем состоянии. При отторможенном тормозе 48 муфта 49 всегда в рабочем состоянии.
Автоматическое управление ры-- агами 4 стрипперного механизма посредством использования механизма подъема происходит следующим образом. Перед захватом изложницы рычаги 4 находятся в положении, изображенном на фиг. 2. На пульте
управления находится переключатель для самостоятельного управления тормозом 5 и сблокированной с ним муфтой 49. Машинист левой рукой поворачивает переключатель и предупреждает оттормаживание тормоза 48 при включении механизма подъема. Правой рукой он поворачивает рукоятку командо-контроллера подъемного механизма на подъем. Тросы 15 остаются неподвижными, а тросы 14 наматываются на барабаны 17 и поднимают за шарниры 10 стрипперный механизм 2, одновременно поворачивая звенья 6 относительно шарниров//. При этом шарниры 7, перемеш,аясь от оси стрипперного механизма 2, через тяги 9 заставляют рычаги 4 закрываться.
Рычаги 4 при закрывании совершают враш:ательное и поступательное движения вверх. При враш,ении рычагов их проушины опускаются настолько, что компенсируют имевшееся поступательное движение рычагов вверх. Дойдя до изложницы и встретив сопротивление своему дальнейшему иеремешению при вращении, рычаги 4 захватывают своими проушинами уши изложницы и без малейшего перерыва поднимают ее.
Минимальное и максимальное расстояния между проушинами рычагов 4 делаются вполне определенными для каждого крана. Положение рычагов 4 при минимуме и максимуме ограничивается кулачками 54, которые закреплены на ободах барабанов 18 (фиг. 1). При достижении одного из упомянутых положений рычагов 4 кулачки 54 упираются в края пазов на ободах барабанов 17. Кулачки 54 перемещаются в пределах точек пазов 55 и 56. При захвате же рычагами 4 изложницы кулачки 54 не соприкасаются ни с одной из сторон пазов 55 и 56.
Как при закрывании рычагов 4 над изложницей, так и у свободных рычагов, при достижении определенного положения рычагов, нужно перевести рукоятку переключателя, оттормозить тормоз 48 н включить муфту 49, чем соединяется вал 32 с валом, установленным
на подшипниках 35 и 47; следовательно, барабаны 17 и 18 будут вращаться синхронно, от одного привода, а рычаги 4 будут зафиксированы.
Если машинист почему-либо забыл выполнить эту операцию, то тросы 14, рассчитанные на подъем всего груза, поднимая стрипперный механизм 2, должны были бы ослабить трос 15. Однако этого оапабления не произойдет в силу действия противовеса 51 (фиг. 3), который заставляет барабаны 18 провернуться вместе с валом 19, зубчатым колесо.м 21, шестерней 40 и ее валом, а также заставляет повернуться храповики 43 и 44. Возможность этого врашения видна на фиг. 3, так как при подъеме стрипперного механизма 2 все храповики вращаются ио часовой стрелке. Отсюда видно, что подъем рычагов 4 при заторможенных барабанах 18 вполне возможен и безопасен.
При переходе на спуск тормоз 48 должен быть оттормолхен. Поэтому в инструкции машинисту указывается, что в начале подъема изложницы (грзза) он должен выполнить вышеупомянутую операцию для синхронизации барабанов. Однако, если он этого не сделает и перейдет на спуск рычагов 4, то имеюшаяся электроблокнровка остановит моторы. Таким образом, спуск рычагов 4 как закрытых, так и открытых, происходит при включенной муфте 49 до момента, когда необходимо бздет рычаги раскрыть. Раскрывание рычагов производится в момент установки изложницы на место, а пустых рычагов - в любом положении. Эта операция также начинается с затормаживания тормоза 48. При этом тросы 15 остаются неподвижными, а тросы 14, опускаясь, дают возможность звеньям 6 произвести обратное вращение по сравнению с закрыванием рычагов 4. Шарниры 10, 5 W. 7 вращаются относительно шарниров // по направлению к оси стрипперного механизма 2. Шарниры 7 через тяги 9 заставляют рычаги 4 раскрываться.
Раскрывание рычагов можно совместить по времени со спуском изложницы. В этом случае надлежит начать раскрывание при положении низа изложницы на 100- 150 мм от места установки на первой или второй скорости. При более высоких передачах упомянутая выше злектроблокировка не позволит выполнить эту операцию.
Рычаги закрываются и раскрываются при первой п второй скоростях. Этим достигается плавность движения рычагов и уменьшение удара их об изложницу. При использовании механизма подъема на первой и второй скоростях для управления рычагами последние проходят полный путь за 1,2 сек., что с точки зрения производительности крана является совершенно достаточным. Из изложенного видно, что захваг рычагами груза произойдет примерно за время перевода рукоятки командо-контроллера с нулевого до второго положения.
Рассмотренное выше автоматическое управление рычагами облегчает труд машиниста, так как отпадает переключение рычага вручную, вследствие чего вмесго двух человек работает один, в то же время повышается производительность крана на 15-20/о. Это вытекает из следуюш;его. Существующие стрипперные краны имеют управление клещами посредством рычага, находящегося возле машиниста. Машинист должен при обработке одной изложницы переключить рычаг минимум два раза, прикладывая при этом значительное усилие. Это происходит при высокой температуре в кабине, доходящей летом до 60° С при действии лучистой теплоты раздеваемых слитков. Рычаг не может быть установлен в непосредственной близости от машиниста и находится от него примерно на расстоянии одного метра. Таким образом,если машинист работает один, то при закрывании и открывании клещей он расходует время на перемещение к рычагу, обратное перемещение от рычага и, наконец, на включение механизма подъема.
Все это является дополнительным расходом времени, небольшим при операции с одной изложницей, но значительно нарастающим при производительности крана в несколько сот основных операций в смену, половина которых относится к раздеванию слитков, а вторая половина к установке подготовленных излол ниц на поддоны.
Предмет изобретения
Клещи для вытаскивания болванок из изложниц в виде шарнирно подвешенных к обойме стрипперного механизма рычагов, управляемых гибким тросом от барабанной лебедки, отличающиеся применением звеньев 6, щарнирно прикрепленных к обойме 1 и сочлененных с рычагами 4 и с гибкими тросами 14 и 15, идущими к двухбарабанной лебедке, с целью обеспечения последовательности непрерывного выполнения операций: сближения клещей для захвата изложницы и подъема стрипперного механизма. 3SJS 20 /7 7 20 Фиг. 1.
Фиг. 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования механизма открывания клещей стриперного захвата | 1937 |
|
SU57860A1 |
| Устройство для извлечения болванок из изложниц | 1933 |
|
SU42916A1 |
| Привод механизма выталкивания стрипперного крана | 1980 |
|
SU973234A1 |
| САМОКАТ | 2006 |
|
RU2329911C2 |
| Цепная врубовая машина | 1928 |
|
SU30146A1 |
| ГРУЗОПОДЪЕМНЫЙ КРАН | 1968 |
|
SU206825A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕЛЬЧЕНИЯ РЕЗИНОВЫХ ШИН | 1991 |
|
RU2022788C1 |
| Кабельный подъемный кран системы Темперлея | 1931 |
|
SU27773A1 |
| Устройство для аварийной эвакуации оператора из кабины управления мостового крана | 1979 |
|
SU880952A1 |
| Механизм управления клещами стрипперного крана | 1981 |
|
SU977110A1 |