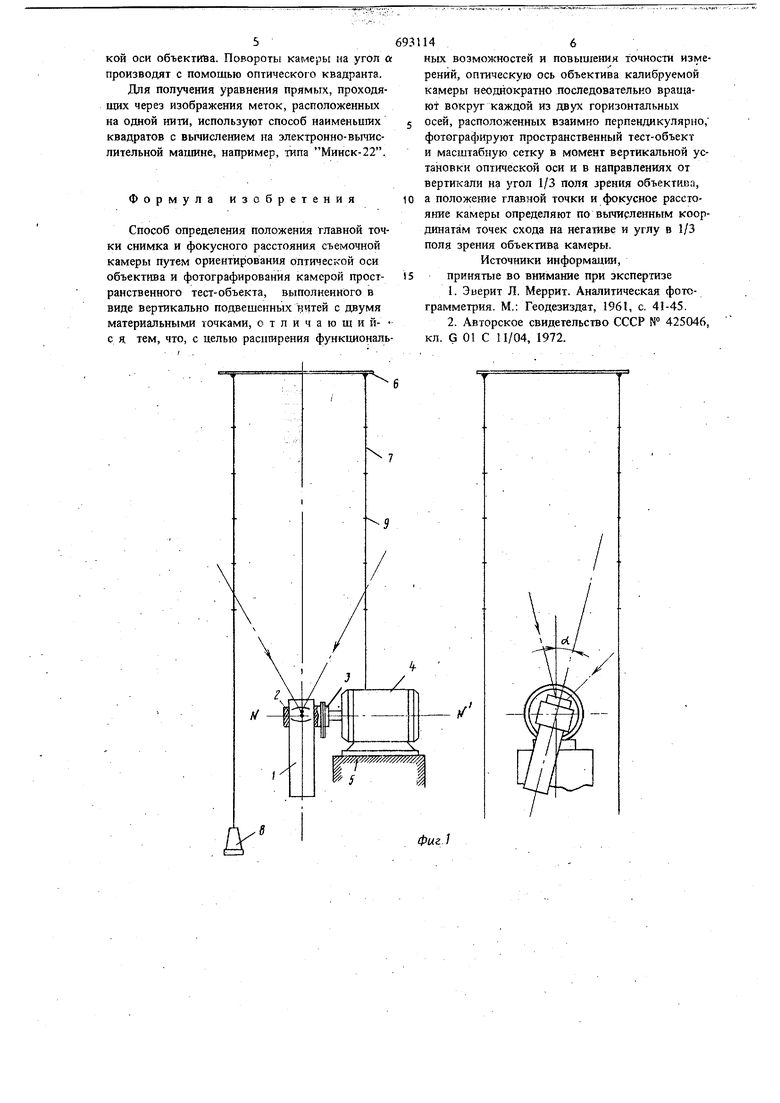
Изобретение относится к фотограмметрии и предназначено преимущественно, для калибровки съемочных камер, отфокусированных на конечное расстояние. Известен способ определения положения гла ной точки снимка и фокусного расстояния калибруемой камеры на основании применения законов перспективы при аэросъемке-путем фотографирования пространственного. тест-объекта в виде зданий (1. По снимкам находят положение точек схода семейства параллельных прямых, по коЬрдинатам которых вычисляются элементы внутреннего ориентирования. Однако применение такого способа для калибровки камер, отфокусированных на конечное расстояние, является сложным. Известен также способ определения главной точки съемной камеры, который основан на построении точки схода по изображениям на сним ке тест-объекта в виде вертикальных прямых, причем камера при фотографировании устанавливается со строго отвесным расположением оптической, оси объектива 2.J Недостатком этого способа является наличие ошибок в ориентировании оптической оси объектива съемочной камеры вертикально из-за неизбежных инстрзтиентальных и юстировочных погрешностей, возникающих при изготовлении съемочной камеры, и ощибок установки аппаратуры в процессе ориентирования при калибровке. Кроме того, контроль вертикальности оптической оси по уровню, устанавливаемому согласно данному способу на плоскости прикладной рамки, возможен не у всех съемочных камер. Цель изобретения - расширение функциональных возможностей и повышение точности измерений. Для этого оптическую ось объектива калибруемой камеры неоднократно последовательно вращают вокруг каждой из двух горизонтальных осей, расположенных взаимно перпендикулярно, фотографируют пространственный тестобъект и масштабную сетку в момент вертикальной установки оптической оси в напрвлениях от вертикали на угол в 1/3 поля зрения объектива, а положение главной точки и фокусное расстояние камеры определяют по вычисленным КйОрДйнагам точек схода на негативе и углу в 1/3 поля зрения объектива камеры. На фиг. 1 дана схема калибровки съемочной камеры с поворотами оптической оси; на фиг. 2 схема определения координат главной точки и фокусного расстояния камеры. На чертеже приняты следующие обозначения:1 - съемочная камера; 2 - хомут; 3 - фла нец с конусом; 4 - делительная головка; 5 - ферма; 6 - плато; 7 - нити; 8 - грузы; 9 материальные точки (метки); Р - плоскость снимка; о, X, z - система координат в плоскос ти Р, задаваемая координатными метками съемочной камерь ; Oi - начало системы координат в плоскости снимка; О - главная точка снимка; В , 5 - координаты главной точки; - точки схода (i 1,2 ... 6); S - задняя узловая точка объектива. Координать изображений материальных точек тест-объекта определяют в системе координаты Oi, х, z, задаваемых координатными мет, ками схемочной камеры (см. фиг. 2). По измеренным координатам изображений материальных точек, расположенных на одной нити, составляют уравнения прямых линий, количество которьсх равно количеству нитей с материальными точками, получившимися на фотограмме. Решая совместно зти уравнения, получают коорди наты первой точки схода (координаты точки at Затем путем врашения камеры оптическую ось поворачивают вокруг горизонтальной оси, про. ходящей примерно через заднюю узловую точку объектива, на угол а, равный 1/3 угла поля зре ния объектива камеры. При этом изображение тест-объекта не должно выходить из поля зрения объектива камеры. После фотографирования тест-объекта при данном положении камеры определяют координаты второй точки схода (координать точки aj так же, как и координаты точки аj.Затем оптическую ось камеры поворачивают вокруг той же горизонтальной оси на тот же угол а, но в противоположную сторону от начального направ ления. После фотографирования tecT-объекта при этоти положении камеры определяют координаты точки схода аз. Получив координаты трех точек схода ai, aj, аз, камеру вторично устанавливают таким образом, чтобы оптическая ось была распо ложена под углом не более 3° к отвесной линии, и после фотографирования тест-объекта по лучают координаты точки схода а. Затем оптическую ось камеры поворачивают на тот же угол а вокруг горизонтальной оси, расположенной под углом 90 ± 10° к начальному положению горизонтальной оси, и, после фотографироваиия тест-объекта получают координаты точки схода as. Координаты точки схода а получают после фотографирования тест-объекта, когда оптическая ось камеры повернута на угол а вокруг этой же горизонтальной оси в противоположную сторону от начального положения. По вычисленным координатам точек схода ai, а2, аз, а, а;, ag и известному значению угла а определяют положение главной точки и фокусное расстояние . По условию способа точки а2, ai и аз лежат на одной прямой. Точки as, а4 и ag также лежат на одной прямой, причем LajSai .а,5аз .аб8а4 Z.a4Sa5 а. В треугольнике аз известны углы Z. a2Sai L aiSa - «. причем отрезки aia2 и aia3 определяют по координатам точек HI, а2 и аз в системе координат снимка. Зная углы L uj,zi и Z. ajS аз, а такжевеличинь отрезков aia2 и aia3, определяют высоту треугольника SKJ и координаты основания высоты, то есть точки KI, в системе координат снимка. Аналогично находят высоту 5к2 треугольника BfiSas и координаты основания этой высоты, то есть точки К2, в системе координат снимка. Главная точка снимка определена как точка пересечения прямой,, расположенной в плоскости снимка и перпендикулярной прямой а2аз, а также проходящей через точку KI , с прямой, расположенной в плоскости снимка, перпендикулярной прямой aja и прохожящей через точку К2. На фиг. 2 главная точка снимка обозначена буквой О. Ее положение в системе координат снимка задается величинами 5х и 5z. Определив координаты точки о, вычисляют длину отрезка ОК, и находят фокусное расстояние калибруемой камеры SO по теореме Пифагора: SO V(SKi) - (OKI)2 , причем фокусное расстояние определяют для контроля или осреднения по формуле SO -/(SKa) - (Oica) При калибровке этим способом исследуемую камеру 1 монтируют на шпинделе делительной головки. Крепление осуществляют с помощью хомута 2 и фланца с конусом 3. Делительная головка 4 устанавливается неподвижно на форме 5, при этом ось делительной головки (NN ) занимает горизонтальное положение. При установке камеры в первоначальное положение оптической .оси использовался оптический квадрант, прикладываемый к корпусу камеры. На плато 6 с масштабной сеткой, прикрепленном к потолку, подвешиваются капроновые нити 7 с грузами 8 и метками 9. Нити располагаются в поле зрения объектива камеры. Перед определением координат точек схода а4, as и а камеру поворачивают в хомуте на утоп 90 i 10° вокруг оптичес56931
кой оси объектива. Повороты камеры на угол а производят с помощью оптического квадранта. Для получения уравнения прямых, проходящих через изображения меток, расположенных на одной нити, используют способ наименьших 5 квадратов с вычислением на электронно-вычислительной мащине, например, типа Минск-22.
Формула изобретения
Способ определения положения главной точки снимка и фокусного расстояния съемочной камеры путем ориентирования оптичесгчой оси объект1ша и фотографирования камерой пространственного тест-объекта, выполненного в виде вертикально подвешенных нитей с двумя материальнылда точками, отличающий-с я тем, что, с целью расншрения функш ональ146
ных возможностей и повышения точности измерений, оптическую ось объектива калибруемой камеры неоднократно последовательно вращают вокруг каждой из двух горизонтальных осей, расположенных взаимно перпендикулярно, фотографируют пространственный тест-объект и масштабную сетку в момент вертикальной установки оптической оси и в направлениях от вертикали на угол 1/3 поля зрения объектива, а положение главной точки и фокусное расстояние камеры определяют по вычирленным координатам точек схода на негативе и углу в 1/3 поля зрения объектива камеры.
Источники информации, принятые во внимание при зкспертизе
1.Эиерит Л. Меррит. Аналитическая фотограмметрия. М.: Геодезиздат, 1961, с. 41-45.
2.Авторское свидетельство СССР № 425046, кл. G 01 С 11/04, 1972.
т(т л7//т7//л
/ 5I
Фиг.1
.. . -
Г , i, -t . -,.;,... Л;.
6931 и

фиг.2
