(54) УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ
ГЛАВНОЙ ТОЧКИ И СОПРЯЖЕННОГО ФОКУСНОГО
РАССТОЯНИЯ НЕТОПОГРАФИЧЕСКОЙ КАМЕРЫ
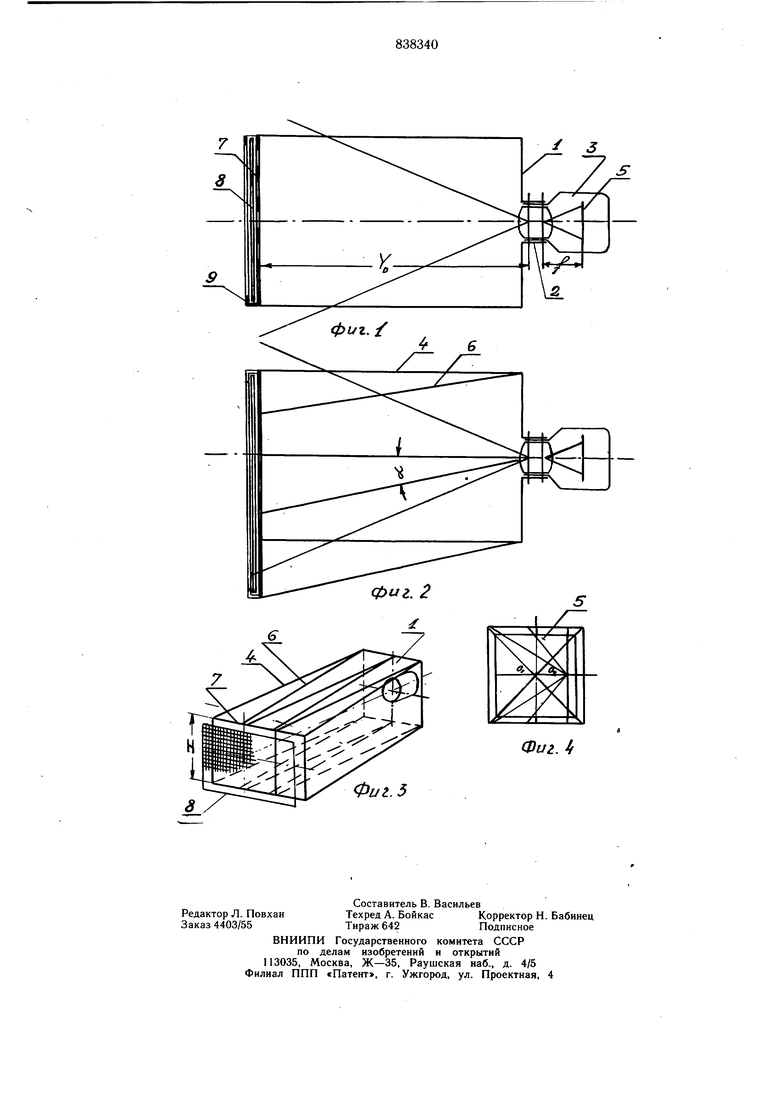
ПРИ ПОДВОДНОЙ СЪЕМКЕ Цель изобретения - проведение калибровки камеры одновременно с подводной съемкой. Указанная цель достигается тем, что в устройстве для определения положения главной точки и сопряженного фокусного расстояния нетопографической камеры при подводной съемке, содержащем камеру, насадку с пространственным тест-объектом и масштабную сетку, насадка к камере выполнена из двух совмещенных прямоугольных параллелепипедов с общей малой гранью, обращенной к объективу, при этом один параллелепипед выполнен с ребрами, расположенными параллельно оптической оси объектива, другой параллелепипед имеет ребра, составляющие угол at с оптической осью, а на ребрах малых граней параллелепипедов, обращенных к объекту съемки, нанесены калибровочные метки. На фиг. 1-4 изображены схемы насадки к фото- и киноаппаратам для определения положения главной точки и фокусного расстояния. Устройство для определения положения главной точки снимка и фокусного расстояния съемочной камеры при фотографировании и киносъемнике с конечных отстояний представляет собой каркас, составленный из двух прямоугольных параллелепипедов с общей малой гранью 1. С помощью втулки 2, расположенной в центре малой грани, каркас присоединяется к калибруемой камере 3. Один из параллелепипедов 4, прямой, с ребрами, расположенными параллельно оптической оси объектива. По изображениям ребер этого параллелепипеда на снимке 5 определяется точка схода О, которая является главной точкой снимка. Второй параллелепипед б, косой, с ребрами, расположенными под углом d к оптической оси объекта. Угол d выбирается по величине так, чтобы точка схода Оа, определяемая по изображениям ребер косого параллелепипеда, не выходила из кадра. Конструктивно величине угла at. удобно принять равной 1/5 угла поля зрения.камеры. Зная расстояние О, и Ог, измеренное по снимку, и значение угла d находят фокусное расстояние оптической системы камеры по формуле:f O.Oa-ctgd Сопряженное фокусное расстояние определяется с учетом показателя преломления среды. На ребрах малых граней 7 нанесены калибровочные метки, по размерам изображения которых на снимке, зная их истинный размер, определяют масштабный коэффициент т. Длина ребер прямого параллелепипеда равна значению уо, которое является расстоянием от передней узловой точки оптической системы до плоскости среднего плана, т. е. до плоскости малых граней, обращенных к объекту съемки. Измерив YO и зная т, определяют фокусное расстояние оптической системы камеры вторым способом по соотношению: f YO JT Прямая, проведенная через точки О, и Ог на снимке, определяет положение одной из координатных осей плоской системы координат снимка. Вторая ось координат проводится через точку О, перпендикулярно линии 0,0г. На экране 8 нанесена масщтабная сетка, которая служит для определения дисторсии оптической системы камеры. Этот экран съемный и вставляется в пазы рамки 9, присоединенной к ребрам малых граней параллелепипедов. По размеру Н ребра малых граней вписываются в проективное изображение кадрового окна на плоскости среднего плана по высоте. Преимуществом предлагаемого изобретения по сравнению с известными устройствами для определения положения главной точки и фокусного расстояния фото- и кинокамер является его простота и возможность применения с любыми фото- и кинокамерами при макросъемках. Конструктивных переделок камер при этом не требуется. Формула изобретения Устройство для определения положения главной точки и сопряженного фокусного расстояния нетопографической камеры при подводной съемке, содержащее камеру, насадку с пространственньш тест-объектом и масштабную сетку, отличающееся тем, что, с целью проведения калибровки камеры одновременно с подводной съемкой, насадка в камере выполнена из двух совмещенных прямоугольных параллелепипедов с общей малой гранью, обращенной к объективу, при этом один параллелепипед выполнен с ребрами, расположенными параллельно оптической оси объектива, другой параллелепипед имеет ребра, составляющие угол d. с оптической осью, а на ребрах малых граней параллелепипедов, обращенных к объекту съемки, нанесены калибровочные метки. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 693114, кл. G 01 С 11/04, 17.01.77 2.Авторское свидетельство СССР № 359629, кл. G 03 В 43/00, 06.05.71 (прототип).
Фиг. 4
Фи1.5
| название | год | авторы | номер документа |
|---|---|---|---|
| Стереофотограмметрический способ определения характеристик взволнованной поверхности моря | 1986 |
|
SU1471072A1 |
| Способ определения положения главной точки снимков и фокусного расстояния съемочной камеры | 1977 |
|
SU693114A1 |
| Способ определения пространственных характеристик тела человека и устройство для стереофоторентгенографии | 1987 |
|
SU1565482A1 |
| СПОСОБ КАЛИБРОВКИ ОПТИЧЕСКОЙ СИСТЕМЫ | 2008 |
|
RU2381474C2 |
| Способ высокоточной калибровки дисторсии цифровых видеоканалов | 2018 |
|
RU2682588C1 |
| СПОСОБ ПРЕДСТАВЛЕНИЯ ИСХОДНОЙ ТРЕХМЕРНОЙ СЦЕНЫ ПО РЕЗУЛЬТАТАМ СЪЕМКИ ИЗОБРАЖЕНИЙ В ДВУМЕРНОЙ ПРОЕКЦИИ (ВАРИАНТЫ) | 2010 |
|
RU2453922C2 |
| Способ калибровки подводной видеокамеры | 2022 |
|
RU2789190C1 |
| Широкоугольный светосильный объектив | 1990 |
|
SU1712933A1 |
| Фотоувеличитель | 1972 |
|
SU447663A1 |
| Дистанционный способ определения относительной прозрачности воды | 1985 |
|
SU1350562A1 |