Изобретение относится к электро технике и может быть применено, на ример, в широтно-импульсных стабилизаторах постоянного напряжения. Известны способы стабилизации постоянного напряжения 1 и 2, Наиболее близким из известных технических решений к изобретению является способ стабилизации постоя .«ого напряжения путем контроля выхо ного напряжения стабилизатора постоянного напряжения, сравнения его с заданным сигналом, формирования управляющего сигнала в зависимости от отклонения выходного напрялсеййя от заданного по принципу юиротноимпульсной модуляции, воздействия на регулирующий элемент стабилизатора полученным сигналом управления и введением корректир товдего сигнала, воздействующего на один из характеристических параметров канала стабилизации. Недостатками известного техничес кого решения является низкая устойчивость и точность стабилизации при возмущающих воздействиях на систему импульсного регулирования. Цель изобретения - повышение . устойчивости и точности стабилизации при возмущающих воздействиях. Это достигается.тем, что в способе стабилизации постоянного напряжения путем контроля выходного напряжения стабилизатора постоянного напряжения, сравнения его с заданным сигналом, формирования управляющего сигнала э зависимости от отклонения выходного напряжения от заданного по принципу широтно-импульсной модуляции, воздействия на регулирующий элемент стабилизатора полученным сигналом управления и введением корректирующего сигнала, воздействующего на один из характеристических параметров канала стабилизации, корректирующий сигнал формируют путем контроля выходного напряжения, регулирующего элемента стабилизатора постоянного напряжения, формируют импульсы, ограниченные по амплитуде и длительности, в момент появления тактового сигнала интегрируют полученные импульсы на текущем интервале их следования, сравнивают с эталонным гналом и осуществляют указанное воздействие полученным сигналом рассогласоаааия rfa одия
з характеристических параметров анала стабилизации.
Наиболее близким техническим раениём устройства для осуществлеия указанного способа стабилиза-. ии постоянного напрйженйя, являетяустройствоу содержащее.последоательный регулирующий элемент с
ЬСД фильтром на выходе, усилительноравнивающий блок, входом соединеный с выходйыми отводами, а выходом со входом широтно-импульсного модуятора, выходом соединенного- с упавляющим входом регулирующего элемента, и Корректирующий блок 3,
Цель изобретения - повышение точности стабилизации и. устойчивости.
Для этого в предлагаемом устройстве корректи уювдий блок выполнен в виде послейовательнэ-соединенных формирователя импульсов, входом подключенного параллельно рекупераци«энному диоду исд фильтра и вы- . прлненного на базе последовательнрc6eдинeннБfзt ограничителя амплитуды и дифференцируюгцего звена, интегратора напряжения, выполненного на базе транзисторного усилителя с емкост ной обратной связью, усилителя постоянного тока с источником опорного HanpfDKeHnjT, выход которого соединен СО входом введенного исполнительного блока. Причем, с целью повышения устойчивости и точности стабилмзации напряж:ения в динаглическом режиме работы , в качестве исполнительного блока использован введенный транзистор, 1йунтирующий черёэ диод, дроссель ЬСД фильтра причем база упомянутого транзистора соедйнена с вйходом усилителя постоянного то- ка корректирующего, блока, а с целью повьшения устойчивости и точности стабилизации в статическом режиме, в качестве исполнительного блока испЬльз0ва;н транзистор усилйтеля постоянного 7ока корректирующего блока, прич.ем. выход указанногоусили еля соединен с выходом усилителя умилительно-сравнивающего блока.
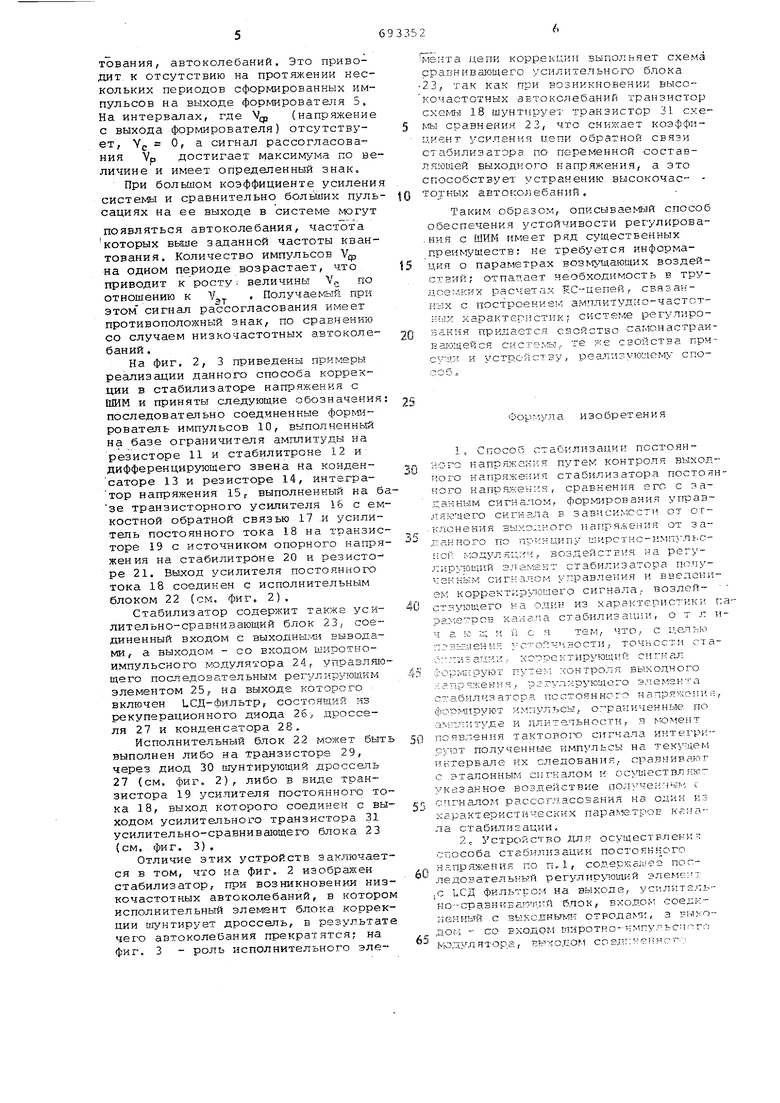
На фиг.1 представлена блок-схема Устройства; поясняющая предлагаемый способ; на фиг.2,3 - варианты устрой.ств, реализующих способГ на фиг. 4 - диаграммынапряжения, ; .поясняющие спОсОб, - .
Импульсная система регулировання с ШИМ (см. фиг. 1)состоит из регу-.. лирующего элемента 1, объект и регу-. лщ)ования, например t С Д-фильтр а с нагрузкой 2, схемы сравнения 3, широтно-импульсного модулятора 4.
Цепь преобразования сигнала по предлагаемому способу состоит из следующих звеньев: формирователь 5 импульсов постоянной длительности и амплитуды, преобразователь б пос-, ледовательности импульсов в среднее;
значение напряжения, узел рассогласования 7, источник 8 эталонного на.пряжений, исполнительный элемент 9.
Суть способа заключается .в сле дующем. Как извес.тно импульсные системы регулирования с широтн.о.импульсным модулированием (ШИМ) характеризуются постоян.ным .перио.дом квантования, но переменной скважностьюработы регулирующего элемента 1. ЕСЛИ при наличии случайных возмущающих в.оздействий системаТеряет уст.ойчивос.ть., т.е. переходит в режим автоколебаний, то период квантования/ в зависимости, от частоты автоколебаний, либо возрастает, либо уменьшается в сравнении с заданным периодом квант.оваНИЯ.
Таким образом, пО частоте сигнала на выходе регулирующего элемента 1 Можно .судить о.наличии и характере автоколебаний,в сйстеме регулировйния с ШИМ и, воздействуя соотв:етствующим образом на характеристические параметры (коэффициент усиления цепи обратной связи, индуктивность Т-СД - фильтра и т.д.), устранять их , т.е. -возвращать: систему в область устойчивой работы.
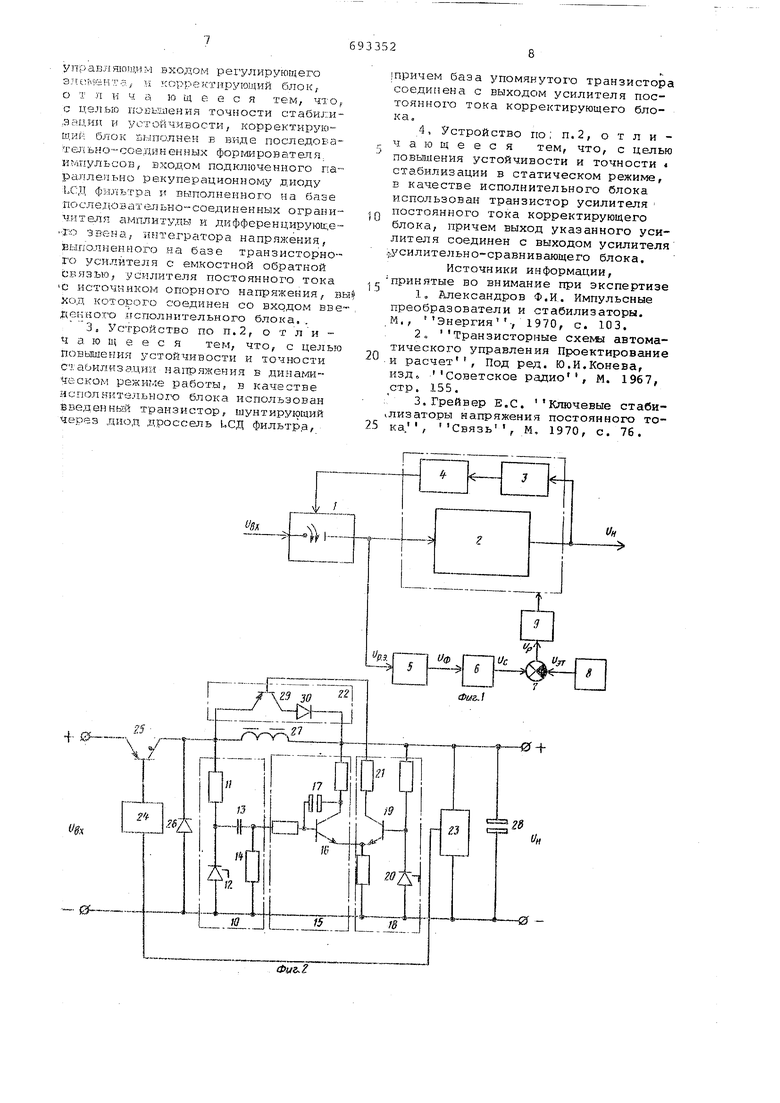
-Для этого модулированные импульсы с выхода регулирующего элемента 1 подают в формирователь 5, где из Них фОрмирук1Т. импульсы постоянной длительности « амплитуды. Далее последовательность сформйров.анных импульсов поступает в преобразователь б, где происходит преобраз.ование этой последовательности в. срейнёе значение напряжения на текущем периоде: квантования. в узле рассогласования 7 происходит сравнён.ие сигнала, поступающего с выхода преобразователя б, с эталонным напряжением, по.ступающим с выхода источника 8, и соответствующим среднему знзчению напряжения одного импульса на заданном периоде i квантования. Сигналрассогласования (при наличии авТоколебанки) подается на исполнительный элемент, KOTOpfcffi воздействует на характериСтическйй параметр системы регулиро ванйЯ, уСтра.няя таким образом автоколебательный режим. -. . . - . ; При ОтсуТствий автоколебаний с выхода формирователя 5 поступает по Одйому сигналу за каждый период квантования. Среднее значение напряжения VP (фиг. 4) поступает .в узел рассогласования 7, но поскольку для этого случая V Vg , то сигнал рассогласования VP 0. В случае возмущающего толчка , например, сброс нагрузки, возможно возбуждение системы и появление низкочастотных, по сравнению с частотой квантования, автокодебаний, Это приводит, .к отсутствию на прот5теении нескольких периодов сформированныхимпульсов на выходе формироватёлл 5. На интервалах, где (напряжение с выхода формирователя) отсутствует, YC SS о, а сигнал рассогласования VP достигает максимума по величине и имеет определенный з.нак.
При большом коэффициенте усиления системы и сравнительио болйших пульсациях на ее выходе в системе могут появляться автоколебания, частЪта которых выше заданной частоты йвантованйя. Количество импульсов Уф на одном периоде возрастает, что приводит к росту I величины V по
отношению к V.
Получае1 1й при
эг
этом сигнал рассогласования имеет противоположный знак, по сравнению со случаем низкочастотных автоколебаний. , . ,;. ; . На. фиг. 2, 3 приведены, примера реализации данного способа коррекции в стабилизаторе напряжения с НИМ и. приняты следующие обозначе.ния, прспедовательно соединенные формйр рвател.ь импульсов 10, выполненн.ьй на. базе ограничится амптгитуды на резисторе 11 .и стабилитроне 1,2 и: дифференцирующего звена На кйндейсаторе 13 и резисторе 14, интегр.атор Напряжения 15f выполненный на .бзе транзисторного усилителя 16 с емкостной обратной связью 17 .и усилитель постоянного трка 18 на транзисторе 1,9 с источником бпОрногр напря.жения на стабилитроне 20 и резисто- ре. 21, Выход усилителя постойннрго ток.а 18 соединен с исполнительным блоком 22 (см. фиг. 2).
Стабилизатор содержит та.кже ,уСилительнр-сра.внива$ощий блок 23, соединенный вхрдом с выходными выррда.ми,. а выходрм - со входом широтноимпульсного -модулятора 24, управдяющего последовательным регулирующим эЯементрм 25, на выходе котррого включен ЦСД-Фильтр, сРстояадий из рекуперационного диРда 26, дросселя 27 и конденсатора 28.
Исполнительный блок 22 может быть выполнен либо на транзисторе 29, через диод 30. шунтирующий дроссель. 27 (см. фиг. 2), либо в виде транзистора 19 усилителя постоянногр тока 18, выход которого соединен с выходом усилительного транзистора $1 усилительно-сравнивающего блока 23 (см. фиг, 3).
Отличие этих устройств заключается в том, что на фиг. 2 изображен стабилизатор, при возникновении низкочастотных автоколебаний, в котором исполнительный элемент блока коррекции шунтирует дроссель, в результате чего автоколебан.ия прекратятся на фиг. 3 - роль испрлнительногр эле1 ента цепи коррекции выполняет схема сравнивающего усилительного блока -23, так как при возникновении высокрчастотных автоколебаний транзистор схегЛь 18 шунтирует транзистор 31 схеNuJ сравнения23, чтр снижает козффициент усиленияцепи обратной связи стабилизатора по переменной составляющей выходного напряжения, а это способствует устранению высокочас- тртных автоколебаний.
Таким образом, описывае№гй спрсоб обеспечения устойчивости регулироваНйя с ШИМ имеет-ряд существенных преимуществ: не требуется информа
ция о параметрах возмущающих воздействий; отпадает необходимость в трудоемких расчетах. RC-цепей, связанных с построением амплитудно-частотных характеристик; системе регулирования придается свойство caNranacrpaHвающейся системы, те же свойства присущи и устройству, реализующему способ.
25
Формула изобретения
1.Способ стабилизации постоянного напряжения путем контроля выходйого напряжения стабилизатора постоянного напряже.ия, сравнения его с заданным сигналом, формирования управляющего сигнсШа в за висимости от отклонения выходного напряжения от заданного по принципу широтно-импульсной модуляции, воздействия на регулирутощий элемент.Стабилизатора получ.ённым сигналом управления и введением кбрректйрующего сИгнала, воздей- ствующего на один из характеристики па
раметров канала стабилизации, от л ичающийся тем. Что, с.целью, првьшения УСТОЙЧИВОСТИ, точности стабилизации, корректирующий сигнал
формируют путем контроля выходного напряжения, регулирующего элемента стабилизатора постояннрго напряжения, формируютимпульсы, ограниченные по амплитуде и длительности, в момент
появления тактового сигнала интегрируют полученные импульсы на текущем интервале их Следования, сравнивают с эталонным сигналом и осуществляют указанное воздействие полученным с
сигналом рассогласования на один из характеристических параметров канала стабилизации.
2.Устройство для осуществления способа стабилизации постоянного напряжения по Ti,l, содержащее последовательный регулирующий элемент
с ЬСД фильтром на выходе, усилительно-сравнивающий блок, входом соединенный с выходными отводами, а выходом - со входом широтно-импульсного
модулятор.а, выходом соединенного
управлжощим входом регулирующего элемента, и корректирующий блок, отлича ющееся тем, что, с целью повышения точности стабили.зации и устойчивости, корректирующий блок выполнен в виде последовательно-соединенных формирователя, . импульсов, входом подключенного паралйёльно рекуперационному диоду исд фильтра и выполненного на последовательно-соединенных ограничителя амплитуды и дифференцнрующе-.ЕО звена, интегратора напряжения, выполненного на базе транзисторного усилителя с емкостной обратной связью, усилителя постоянного тока С источником опорного напряжения, в ход которого соединен со входом вве денного исполнительного блока..
3, Устройство по п.2, о т ли чающееся там, что, с целью повышения устойчивости и точности ста6ййиз ацйи Напряжения в динамическом режи1 1е работы, в качестве исполнительного блока использован введенный транзистор, шунтирующий через диод дроссель исд фильтрд.
tMbzEzfay
0693352
8
причем база упомянутого транзистора соединена с выходом усилителя постоянного тока корректирующего блока.
4. Хстройство по; п.2, о т л и чающееся тем, что, с целью повышения устойчивости и точности стабилизации в статическом режиме, в качестве исполнительного блока использован транзистор усилителя постоянного тока корректирующего блока, причем выход указанного усилитёЛя соединен с выходом усилителя у.силительно-сравнивающего блока,
Источники информации, с принятые во. внимание при экспертизе
1, Александров Ф.И., Импульсные преобразователи и стабилизаторы, М., Энергия .,1970, с. 103. : 2. Транзисторные схема автоматического управления Проектировгшие
И расчет , Под ред. Ю.И.Конева,
изд. Советское радио , М. 1967,
стр. 155.
: 3. Грейвёр Е. С. Ключевые стаби1лизаторы напряжения постоянного тоСвязь, М. 1970, с. 76,
,,я
ка, ,
0
| название | год | авторы | номер документа |
|---|---|---|---|
| Импульсный стабилизатор постоянного напряжения | 1980 |
|
SU902003A1 |
| Способ управления импульсным понижающим преобразователем напряжения со стабилизацией тока (варианты) | 2017 |
|
RU2661900C1 |
| Способ стабилизации постоянного напряжения | 1978 |
|
SU903827A1 |
| Импульсный стабилизатор постоянного напряжения | 1987 |
|
SU1580335A1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2012 |
|
RU2509337C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ ПОСТОЯННОГО НАПРЯЖЕНИЯ | 2011 |
|
RU2451322C1 |
| ИМПУЛЬСНЫЙ СТАБИЛИЗАТОР ПОСТОЯННОГО НАПРЯЖЕНИЯ ПОНИЖАЮЩЕГО ТИПА | 1991 |
|
RU2006062C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ ПРЕОБРАЗОВАТЕЛЕМ ПОСТОЯННОГО НАПРЯЖЕНИЯ СО СТАБИЛИЗАЦИЕЙ ПРЕДЕЛЬНОГО ТОКА | 2003 |
|
RU2249842C2 |
| Способ стабилизации выходного напряжения источника питания постоянного напряжения | 1981 |
|
SU966679A1 |
| Автоматический регулятор нагрузки горной машины | 1981 |
|
SU1076578A1 |

iKJ AfmeKCtneffpm/jf omcyracmSywm . Низкочастотные автокоАеУания Высокочастотные аВтокОлеУонт
