Изобретение относится к области электротехники, в частности к преобразовательной технике, и может быть использовано при построении импульсных стабилизаторов постоянного напряжения (ИСН) с силовой цепью повышающего типа и дискретной обработкой информационных сигналов, имеющих малые длительность переходных процессов и статическую ошибку стабилизации выходного напряжения.
Известен [1] способ управления импульсного стабилизатора напряжения (ИСН), выполненный в виде управляемого электрического ключа (УЭК) и DLC-фильтра (индуктивно-емкостного фильтра с замыкающим диодом), соединенных последовательно между входом и выходом ИСН, заключающийся в том, что измеряют ток IC конденсатора DLC-фильтра и напряжение Uвых на выходе ИСН, вычисляют напряжение UС.н на емкости конденсатора DLC-фильтра путем интегрирования сигнала, полученного суммированием тока конденсатора, взятого с коэффициентом 1/С, где С - емкость конденсатора DLC-фильтра, и сигнала отклонения напряжения UС.н от Uвых, взятого с коэффициентом K0=(0,05÷0,0005)/(RС·С), где RС -внутреннее активное сопротивление конденсатора DLC-фильтра, формируют сигнал рассогласования ε по напряжению путем сравнения напряжения UС.н с эталонным напряжением Uэт, умножают ток IС и сигнал рассогласования ε на коэффициенты KI1 и KU1, соответственно, причем
где L - индуктивность DLC-фильтра,
Uвх - напряжение на входе ИСН,
tи - статическая длительность импульса управления УЭК,
Т - период преобразования и
νл - скорость изменения пилообразного напряжения широтно-импульсного модулятора (ШИМ),
формируют сигнал управления, суммируя сигналы, полученные в результате умножения, и сигналом управления формируют импульсы управления УЭК по принципу ШИМ с блокировкой модулятора в момент формирования модулируемого фронта импульса.
Этот способ обеспечивает ИСН с силовой цепью понижающего типа (ИСН ПН) малую длительность переходных процессов при воздействиях по выходу (изменение тока нагрузки Iн) и по входу (изменение напряжения Uвх на входе ИСН).
К недостаткам этого способа относится то, что он не обеспечивает высокой статической точности стабилизации напряжения Uвых, поскольку сигнал рассогласования 8 по напряжению умножается на коэффициент KU1, величина которого, определяемая через параметры ИСН, относительно мала и не может быть увеличена без ухудшения динамических характеристик ИСН. Кроме того, этот способ неприменим непосредственно для стабилизации выходного напряжения ИСН с силовой цепью повышающего типа (ИСН ПВ), содержащего дроссель и диод, включенные последовательно между входом и выходом стабилизатора, управляемый электрический ключ, включенный между общим проводом стабилизатора и точкой соединения дросселя с диодом, и конденсатор, включенный между выходом и общим проводом стабилизатора.
Известен [2] способ управления ИСН ПВ, заключающийся в измерении выходного напряжения на интервале включенного состояния УЭК, запоминании выходного напряжения на момент окончания интервала включенного состояния УЭК, получении сигнала рассогласования по напряжению путем сравнения запомненного значения выходного напряжения и эталонного напряжения и формировании сигналом рассогласования по напряжению импульсов управления УЭК по принципу ШИМ. Этот способ позволяет обеспечить ИСН ПВ высокую статическую точность стабилизации выходного напряжения, но не обеспечивает малой длительности переходных процессов.
Известен способ управления ИСН ПН [3], согласно которому измеряют ток IC(t) конденсатора DLC-фильтра и напряжение Uвых на выходе стабилизатора, получают сигнал рассогласования по напряжению ε(t), вычитая эталонное напряжение Uэт из Uвых(t), получают первый сигнал, умножая сигнал рассогласования по напряжению ε(t) на коэффициент Kp<1/(RCC+T), где RC и С, соответственно, внутреннее активное сопротивление и емкость конденсатора DLC-фильтра, получают сигнал «ток конденсатора», считая его равным току IC(t) конденсатора DLC-фильтра, умножают сигнал «ток конденсатора» на коэффициент 1/С и, суммируя с первым сигналом, получают второй сигнал, интегрируют второй сигнал, причем диапазон возможного изменения интеграла второго сигнала ограничивают по значениям его максимальных отклонений в динамических режимах, не приводящих к прерыванию модуляции, получают третий сигнал, считая его равным интегралу второго сигнала, получают сигнал управления, умножая сигнал «ток конденсатора» и третий сигнал на коэффициенты КI1 и КU1, соответственно, и суммируя инверсные значения сигналов, полученных в результате умножения, формируют сигналом управления импульсы управления УЭК по принципу ШИМ с блокировкой модулятора в момент формирования модулируемого фронта импульса. При этом КI1 и КU1 соответствуют КI1 и КU1 из [1].
Этот способ позволяет обеспечить ИСН ПН малую длительность переходных процессов в динамических режимах работы и малую величину статической ошибки выходного напряжения. Однако, при его использовании для управления ИСН ПВ не достигается малая длительность переходных процессов в динамических режимах работы из-за различия силовых цепей ИСН ПН и ИСН ПВ.
В известных ИСН ПВ, как правило, решают задачи уменьшения величины статической ошибки выходного напряжения или длительности переходных процессов. Однако существуют области техники, в которых от ИСН ПВ требуются как малая длительность переходных процессов, так и малая статическая ошибка выходного напряжения. Например, такие требования к ИСН ПВ предъявляются при их использовании в системах электропитания космических аппаратов. Обеспечить в ИСН малую длительность переходных процессов и малую статическую ошибку выходного напряжения достаточно сложно, так как увеличение коэффициента усиления сигнала рассогласования по напряжению или интегрирование этого сигнала позволяет уменьшить статическую ошибку выходного напряжения, но, как правило, приводит к увеличению длительности переходных процессов в динамических режимах работы ИСН.
В качестве прототипа выбран способ управления ИСН с ШИМ [4], согласно которому в импульсном стабилизаторе, содержащем дроссель с индуктивностью L и диод, включенные последовательно между входом и выходом стабилизатора, управляемый электрический ключ, включенный между общим проводом стабилизатора и точкой соединения дросселя и диода, конденсатор с емкостью С, включенный между выходом и общим проводом стабилизатора, измеряют напряжение Uвых на выходе стабилизатора, формируют сигнал рассогласования по напряжению, вычитая эталонное напряжение из напряжения на выходе стабилизатора, получают первый сигнал, умножая сигнал рассогласования по напряжению на коэффициент Kp, интегрируют второй сигнал, путем прерывания интегрирования ограничивают диапазон изменения интеграла второго сигнала по значениям его максимальных отклонений в динамических режимах, не приводящих к прерыванию модуляции, получают суммарный сигнал, умножая сигнал «ток конденсатора» и третий сигнал на коэффициенты KI и KU, соответственно, и суммируя инверсные значения сигналов, полученных в результате умножения, управляющим сигналом формируют импульсы управления управляемым электрическим ключом по принципу широтно-импульсной модуляции с блокировкой модулятора в момент формирования модулируемого фронта импульса, измеряют входное напряжение Uвх, токи дросселя IL и нагрузки IН, вычисляют сигнал «ток конденсатора» IC=IL-IH·Uвых/Uвх, получают третий сигнал, интегрируя четвертый сигнал, вычисляемый путем вычитания из сигнала «ток конденсатора» самого третьего сигнала, взятого с коэффициентом K0<<1/T, где Т- период преобразования, второй сигнал принимают равным первому, результирующий сигнал получают, вычитая интеграл второго сигнала из суммарного сигнала, причем в случае модуляции переднего фронта импульсов управления управляемым электрическим ключом сигнал управления получают, инвертируя результирующий сигнал, а в случае модуляции заднего фронта импульсов управления управляемым электрическим ключом сигнал управления принимают равным результирующему сигналу, при этом KI=2,4·L·Uл(T)/(Uвых·T); KU=KI/T; Kp<4·KI·C·Uвых/[Uвх·T(2RCC+T], где RC - внутреннее активное сопротивление конденсатора, формируют нелинейное опорное напряжение модулятора Uл(t)=2,4·Uл(T)·(t2/4·T2+t3/6·T3), где Uл(T) - амплитудное значение нелинейного опорного напряжения модулятора 0<t<T.
В известном решении [4] обеспечиваются как малая длительность переходных процессов, так и малая статическая ошибка выходного напряжения, применительно к ИСН ПВ. В то же время реализация такого решения на аналоговых элементах затруднительна как в проектировании, так и в производстве. Структурные схемы выпускаемых промышленностью специализированных интегральных схем существенно отличаются от структуры устройства управления, реализующего решение [4]. Аппаратная реализация закона управления на подобных микросхемах вызывает применение большого количества внешних элементов, что влечет за собой усложнение и снижение надежности устройства управления. Поэтому возникает необходимость разработки новых решений, позволяющих осуществить переход на микроэлектронную элементную базу при одновременном сохранении малых длительности переходных процессов и статической ошибки выходного напряжения ИСН.
В основу изобретения положена задача повышения качества выходного напряжения ИСН ПВ в динамических и статических режимах его работы при дискретной обработке его информационных сигналов, позволяющей обеспечить практическую реализацию ИСН с устройством управления на основе микроконтроллерной техники. При этом под повышением качества выходного напряжения в динамических режимах понимается уменьшение длительности переходных процессов, а в статических режимах - обеспечение астатизма выходного напряжения.
Поставленная задача решается тем, что в способе управления импульсным стабилизатором напряжения, содержащим дроссель с индуктивностью L и диод, включенные последовательно между входом и выходом стабилизатора, управляемый электрический ключ, включенный между общим проводом стабилизатора и точкой соединения дросселя и диода, конденсатор с емкостью С, включенный между выходом и общим проводом стабилизатора, заключающемся в том, что измеряют напряжение Uвых на выходе стабилизатора, измеряют входное напряжение Uвх, токи дросселя IL и нагрузки IH, получают второй сигнал, умножая первый сигнал на коэффициент Kp, путем прерывания интегрирования ограничивают диапазон изменения третьего сигнала по значениям его максимальных отклонений в динамических режимах, не приводящих к прерыванию модуляции, суммарный сигнал получают умножая четвертый сигнал и пятый сигнал на коэффициенты KU и KI соответственно, и суммируя инверсные значения сигналов, полученных в результате умножения, а также вычитая третий сигнал, причем в случае модуляции переднего фронта импульсов управления управляемым электрическим ключом сигнал управления получают, инвертируя результирующий сигнал, а в случае модуляции заднего фронта импульсов управления управляемым электрическим ключом сигнал управления принимают равным результирующему сигналу, при этом


где RC - внутреннее активное сопротивление конденсатора, а нелинейное опорное напряжение модулятора 
где Uл(T) - амплитудное значение нелинейного опорного напряжения модулятора, 0<t<T,
сигналом управления формируют импульсы управления управляемым электрическим ключом по принципу широтно-импульсной модуляции с блокировкой модулятора в момент формирования модулируемого фронта импульса, согласно изобретению дополнительно производят выборку сигналов тока дросселя IL, тока нагрузки IH, выходного Uвых и входного Uвх напряжений на каждом периоде преобразования в определенные моменты времени (mh), где
h=T/l,
l=2, 3, 4, … - количество интервалов дискретизации,
Т- период преобразования, m=1, 2, 3, …,
формируют сигнал рассогласования по напряжению ε(mh), вычитая эталонное напряжение из напряжения на выходе стабилизатора Uвых(mh), принимают его равным первому сигналу, третий сигнал вычисляют как 

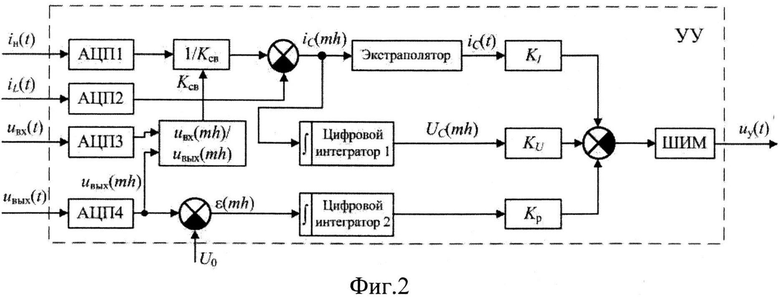
На фиг.1 приведена силовая цепь ИСН ПВ. На фиг.2 приведена структурная схема устройства управления ИСН ПВ; на фиг.3-4 приведены диаграммы, поясняющие определение ошибки, возникающей при дискретизации информационных сигналов. На фиг.5-17 приведен состав имитационной схемотехнической модели ИСН с устройством управления, а также временные диаграммы, необходимые для пояснения процесса обработки сигналов и подтверждения реализации предлагаемого способа управления ИСН. На фиг.17-20 приведены диаграммы выходного напряжения, тока дросселя и тока нагрузки ИСН ПВ, подтверждающие решение поставленной задачи.
Силовая цепь ИСН ПВ (фиг.1) содержит регулирующий элемент 1, в который входят управляющий электрический ключ (УЭК) 2 и диод 3, дроссель 4 и два конденсатора 5 и 6. Входной конденсатор 6 включен между общим проводом 7 и дросселем 4, другой вывод которого соединен с входом регулирующего элемента 1 (т.е. с общей точкой УЭК 2 и диода 3). Другой конденсатор 5 включен между общим проводом 7 и выходом регулирующего элемента 1, т.е. на выходе ИСН.
Для реализации предлагаемого способа управления, в частности обеспечения высокого качества выходного напряжения ИСН ПВ, воспользуемся подходом, изложенным в [5], где осуществлен синтез оптимального по быстродействию закона управления, обеспечивающего минимальную конечную длительность переходных процессов в ИСН с ШИМ и силовой цепью понижающего типа. Закон управления синтезирован для случая малых отклонений длительности импульса управления силовым ключом ИСН

T - период преобразования.
Этот закон заключается в приведении системы с широтно-импульсной модуляцией (ШИМ) к системе с амплитудно-импульсной модуляцией (АИМ), синтезе последовательного корректирующего устройства с использованием третьего полиномиального уравнения синтеза [6] и обратного перехода от системы с АИМ к системе с ШИМ, учитывающего специфику, вносимую ШИМ. Применение при синтезе третьего полиномиального уравнения позволяет достичь минимальной конечной длительности переходных процессов при наличии отклонения параметров корректирующего устройства и силовой цепи ИСН от номинальных. Сам синтез осуществляется по регулируемым составляющим переменных состояния, под которыми понимают отклонения переменных состояния от их значений в стационарном режиме.
Реализация оптимального по быстродействию закона управления ИСН на аналоговых элементах затруднительна как в проектировании, так и в производстве. Структурные схемы выпускаемых промышленностью специализированных интегральных схем (ИС) существенно отличаются от структуры устройства управления, реализующего оптимальный по быстродействию закон управления. Аппаратная реализация закона управления на подобных микросхемах вызывает применение большого количества внешних элементов, что влечет за собой усложнение и снижение надежности устройства управления. Поэтому переход на микроэлектронную базу, к цифровой обработке сигналов, является необходимостью.
Основными трудностями цифровой реализации законов управления, обеспечивающих ИСН высокое быстродействие, состоит в необходимости оцифровывания текущих значений информационных сигналов (токов через элементы силовых цепей и напряжений на выходе и входе ИСН) за малое время. Так, если период преобразования современных ИСН составляет 16-25 мкс, а для формирования цифрового сигнала широтно-импульсного модулятора (ШИМ) необходимо произвести не менее 6-7 выборок на периоде преобразования, то период дискретизации может составлять 2-4 мкс. Также возникает проблема конечной разрядности - если для представления информационного сигнала используется недостаточное количество битов, это может привести к существенному снижению качества работы, появлению автоколебаний на выходе ИСН, а в отдельных случаях и к потере устойчивости. Таким образом, для создания работоспособного быстродействующего ИСН ПВ с дискретной обработкой информационных сигналов необходимо однозначно определить минимально возможное число периодов дискретизации и уровней квантования информационных сигналов устройства управления (УУ) ИСН.
Входные сигналы устройства управления ИСН - токи нагрузки и дросселя, входное напряжение, напряжение на конденсаторе фильтра - поступают в схему управления уже отфильтрованными, т.к. элементы силовой цепи (дроссель и конденсатор) представляют собой фильтр. Тем самым отпадает надобность в фильтре низких частот, который является устройством с быстродействием много меньшим, чем у аналого-цифрового преобразователя (АЦП) или вычислителя и его отсутствие способно значительно сократить общее время выполнения процедуры цифровой обработки исходных сигналов. Устройство управления ИСН в качестве выходного сигнала должно выдавать последовательность управляющих импульсов. В этом случае необходимость в цифроаналоговом преобразователе (ЦАП) и сглаживающем фильтре низких частот отпадает, т.к. сформированный сигнал управления через согласующее устройство (драйвер) можно подавать напрямую на силовой ключ. Это также положительно скажется на общем времени цифровой обработки сигналов схемой управления.
Входной сигнал схемы управления имеет бесконечный спектр, что является препятствием для его преобразования в цифровую форму. Это связано с природой аналого-цифрового преобразования, осуществляемого в два этапа: дискретизации по времени и квантования по уровню.
Дискретизация по времени (далее - дискретизация) представляет собой процедуру взятия мгновенных значений входного сигнала x(t) через определенные промежутки (равные или неравные) времени h. Мгновенные значения x(mh) называют выборками или отсчетами, время h - периодом дискретизации. Период дискретизации определяет частоту дискретизации fд=1/h. Чем чаще брать выборки, т.е. чем меньше период дискретизации, тем точнее последовательность отсчетов x(mh) будет отображать исходный сигнал. С другой стороны, чем выше частота дискретизации, тем труднее вычислителю выполнять большое количество операций над отсчетами в темпе их поступления на переработку. Таким образом, точность представления сигнала требует увеличивать частоту дискретизации, а стремление снизить аппаратные затраты приводит к желанию снизить число выборок.
Квантование по уровню (далее - квантование) производится с целью формирования последовательности чисел: весь диапазон изменения величины отсчетов разбивается на некоторое число дискретных уровней и каждому отсчету по определенному правилу присваивается значение одного из ближайших уровней квантования. В результате получается последовательность чисел, представляемых в двоичном коде. Количество уровней определяется разрядностью АЦП b. Квантованный отсчет отличается от выборки x(mh) на величину ошибки квантования, которая тем больше, чем меньше b. Максимальная ошибка квантования при использовании округления в качестве приближения равна половине шага квантования Q:


Отсюда следует, что чем больше разрядность b АЦП, тем точнее представляется отсчет, но тем сложнее и дороже оказывается АЦП, который необходим для решения поставленной задачи. Современные АЦП имеют разрядность от 8 до 20. Для рассматриваемого вида задач, а именно для реализации устройства управления быстродействующим ИСН ПВ, достаточно применения АЦП с разрядностью 12-14 бит, что обеспечит ошибку квантования (2) токовых сигналов на уровне 0.05%.
Сформированная цифровая последовательность поступает на вычислитель, который по заданному алгоритму каждому отсчету x(mh) ставит в однозначное соответствие выходной сигнал y(mh). Результатом переработки является новая цифровая последовательность - цифровой сигнал. Время переработки tпер исходного сигнала не должно превышать периода дискретизации h. Это может быть обеспечено в случае, когда тактовая частота вычислителя существенно превышает частоту дискретизации. Именно при этих условиях возможна работа схемы управления в реальном времени. Отсюда вытекает требование для элементной базы вычислителя, работающего в режиме реального времени: тактовая частота вычислителя должна в сотни раз превосходить частоту дискретизации. Для рассматриваемого вида задач при частоте преобразования 40-60 кГц и 6-7 выборках на периоде преобразования тактовая частота вычислителя должна быть на уровне 30-40 МГц или выше.
Структурная схема устройства управления (УУ), поясняющая процесс дискретной обработки информационных сигналов для ИСН, приведена на фиг.2. Для ИСН ПВ Kсв=Uвх/Uвых.
В процессе работы УУ посредством блоков АЦП производится выборка (дискретизация) токов дросселя IL и нагрузки IH, выходного Uвых и входного Uвх напряжений. Особенность дальнейшей обработки сигналов состоит в том, что по выбранным значениям токов дросселя IL и нагрузки IH производится вычисление тока конденсатора:

где (mh) - момент выборки информационного сигнала, h=T/l, где l=2,3,4, … - количество интервалов дискретизации, T - период преобразования, m=1, 2, 3, … .
По полученному IC(mh) и предшествующему IC((m-1)h) значениям тока конденсатора в блоке «экстраполятор» (фиг.2) производится линейная экстраполяция и определяется дальнейшее изменение тока на следующем интервале от (mh) до (m+1)h, т.е. осуществляется прогноз дальнейшего изменения тока (формируется аналог непрерывного сигнала «ток конденсатора» для более точного вычисления длительности импульса управления). В блоке «цифровой интегратор 1» осуществляется операция вычисления ампер-секундной площади тока конденсатора (площади трапеции, образованной значениями тока IC(mh) и IC((m-1)h) и ее суммирование с ранее вычисленной к моменту (m-1)h ампер-секундной площадью тока конденсатора. Текущие сигналы IC(t) блока «экстраполятор» (прогнозируемое значение тока конденсатора) и UC(mh) блока «цифровой интегратор 1» умножаются на коэффициенты KI и KU, суммируются и поступают на вход блока, выполняющего функцию широтно-импульсного модулятора (блок «ШИМ»).
Требуемая статическая точность стабилизации выходного напряжения (астатизм) обеспечивается блоком «цифровой интегратор 2», в котором осуществляется интегрирование (суммирование площадей) сигнала рассогласования по напряжению, взятого с коэффициентом
Дискретизация определяется как процесс преобразования функции непрерывного аргумента (времени) в функцию дискретного аргумента (отсчетов). Во время аналого-цифрового преобразования не должно быть каких-либо изменений во входном сигнале, которые могли бы повлиять на цифровой выход. Это обеспечивается операцией выборки и хранения в каждом цикле дискретизации - значение аналогового сигнала считывается в начале каждого интервала и остается постоянным в течение всего времени АЦ-преобразования. В режиме выборки амплитуда выходного сигнала равна мгновенному значению входного сигнала, в режиме хранения выходной сигнал постоянен и равен последнему выходному значению, когда АЦП функционировал в режиме выборки.
Существуют методы определения адекватного количества выборок с использованием теоремы Котельникова (теоремы дискретизации) [7]. Так, предлагаются уточненные формулировки теоремы Котельникова и на основе этого выводятся интерполяционные формулы восстановления конечного непрерывного сигнала по отдельным отсчетам, не содержащие бесконечных сумм; приводятся алгоритмы расчета граничной частоты. Также приводятся способы восстановления непрерывного сигнала с использованием интерполяционной формулы Лагранжа или метода наименьших квадратов, но эти способы используют аппарат теории линейных импульсных систем, что для дискретной схемы управления ИСН неприменимо.
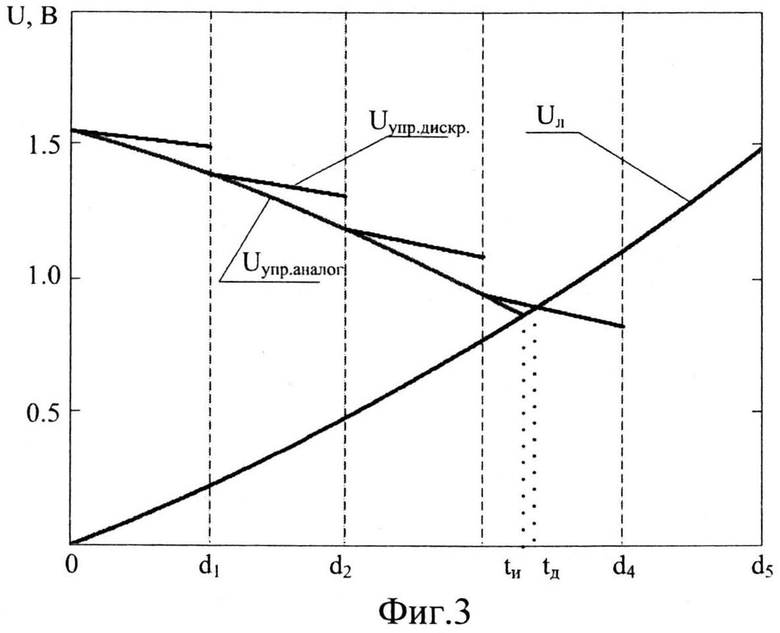
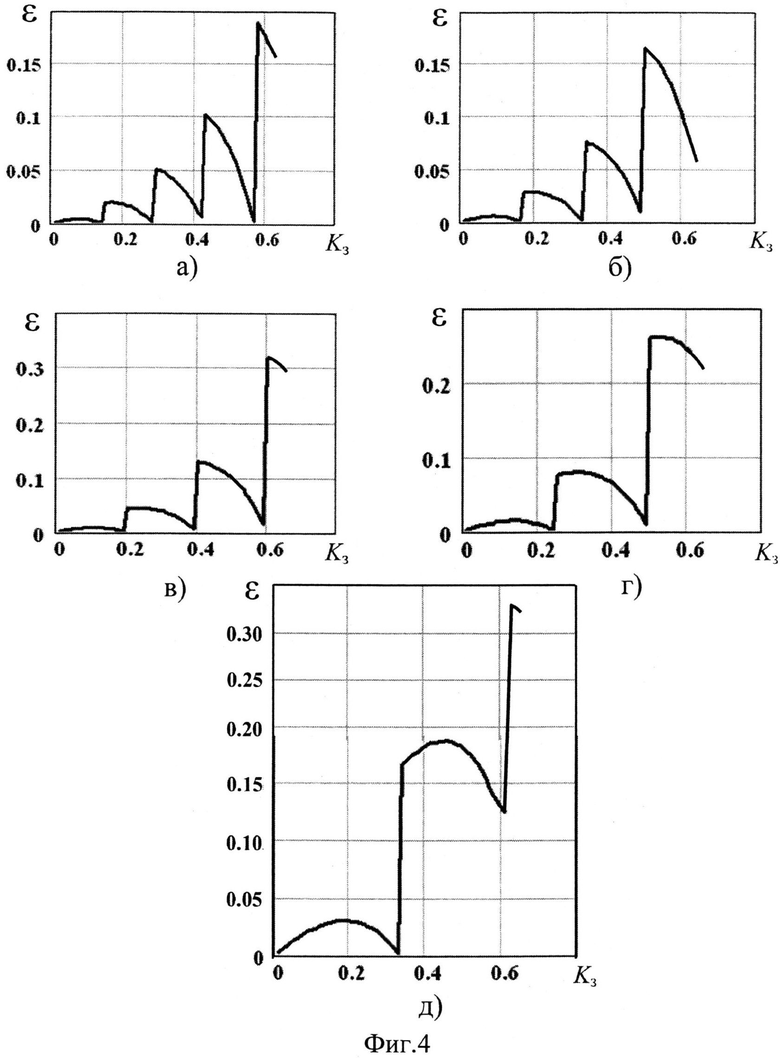
Для определения минимального количества выборок информационных сигналов согласно структурной схеме, приведенной на фиг.2, была разработана математическая модель устройства управления ИСН ПВ. На фиг.3 приведены сравнительные диаграммы аналогового управляющего сигнала и сигнала при их пересечении с опорным сигналом ШИМ. Принятые обозначения: Uл - опорный сигнал ШИМ, Uупр.аналог - аналоговый управляющий сигнал на входе ШИМ, Uупр.дикр - сигнал, сформированный в дискретные отсчеты времени, tи - время пересечения аналогового управляющего сигнала с опорным сигналом ШИМ, tд - время момента пересечения сигнала Uупр.дикр с опорным сигналом ШИМ. Ошибка дискретизации определяется по формуле:

Таким образом, ошибка дискретизации определена как относительная ошибка длительности импульса управления, формируемого дискретно, по сравнению с импульсом управления, формируемым аналоговым устройством управления. Результаты исследований в виде графических зависимостей ошибки дискретизации от величины коэффициента заполнения при различном количестве выборок на периоде преобразования приведены на фиг.4. Согласно регулировочным характеристикам ИСН ПВ проводить исследования для коэффициента заполнения K3>0.6-0.7 нецелесообразно, т.к. при этом наблюдается низкий КПД ИСН. Кроме того, при высоком различии выходного и входного напряжений ИСН (более чем в 3-4 раза) целесообразно применять трансформаторные стабилизаторы напряжения.
Из приведенных результатов видно, что при уменьшении количества выборок ошибка дискретизации увеличивается. Применение трех выборок на периоде преобразования нецелесообразно, т.к. отклонение длительности импульса управления достигает величины 18% в широком диапазоне изменения коэффициента заполнения (фиг.3 и 4,д). Применение семи выборок дает низкую ошибку дискретизации (фиг.3 и 4,а), но при этом потребуется высокая мощность вычислителя для обработки сигналов при реализации УУ. При пяти отсчетах ошибка дискретизации достигает величины 10-12% в широком диапазоне изменения коэффициента заполнения, одновременно снижаются аппаратные затраты вычислителя.
С целью подтверждения работоспособности оптимального по быстродействию закона управления в условиях дискретной обработки сигналов в соответствии со структурной схемой, представленной на фиг.2 и с учетом требований и рекомендаций, приведенных выше, разработана имитационная схемотехническая модель ИСН ПВ с дискретным УУ в формате Spice. Программная реализация модели УУ выполнена на основе аналоговых устройств, имитирующих цифровую обработку поступающей информации. С целью ускорения процесса моделирования опорный пилообразный сигнал широтно-импульсного модулятора формировался непрерывным. При аппаратной реализации устройства управления частота сравнения опорного сигнала с управляющим сигналом Uy(t) выбирается много больше частоты дискретизации, что позволяет сделать подобное допущение.
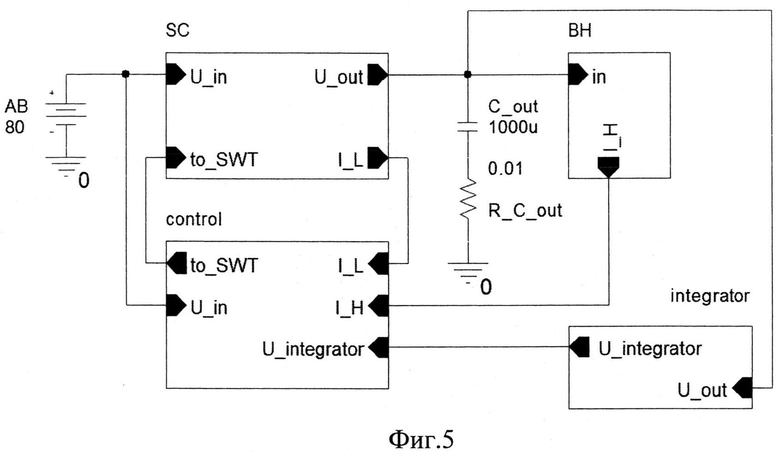
На фиг.5 приведена схема модели ИСН ПВ с устройством управления, выполненным в соответствии со структурной схемой, приведенной на фиг.2. Модель содержит:
- иерархические блоки SC, control, integrator, ВН;
- источник входного напряжения АВ;
- конденсатор C_out и резистор R_C_out, образующие выходной фильтр.
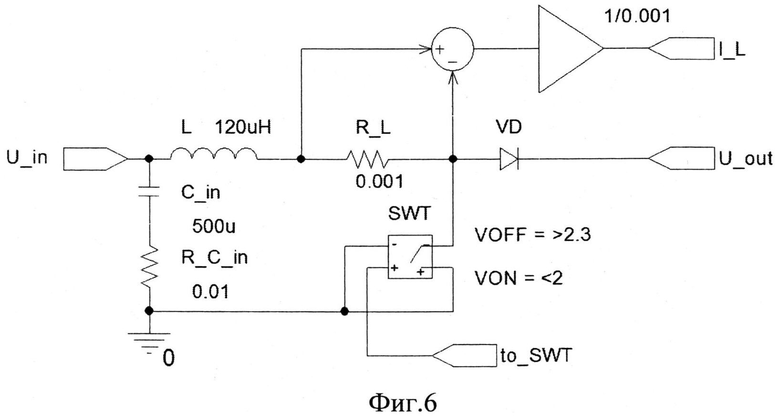
Состав иерархического блока SC, содержащего модель силовой цепи понижающего типа, приведен на фиг.6. Блок SC содержит:
- порт ввода U_in для подключения источника постоянного напряжения АВ, имитирующего аккумуляторную батарею, порт ввода to_SWT для подачи управляющего сигнала из блока control на силовой ключ SWT, порт вывода IJL для подачи информационного сигнала тока дросселя в блок control, порт вывода U_out для подключения силовой цепи к выходному фильтру и нагрузке;
- конденсатор C_in и резистор R_C_in, образующие входной фильтр;
- силовой ключ SWT;
- силовой диод VD;
- дроссель силовой цепи L;
- датчик тока дросселя, образованный резистором R_L, сумматором и усилителем.
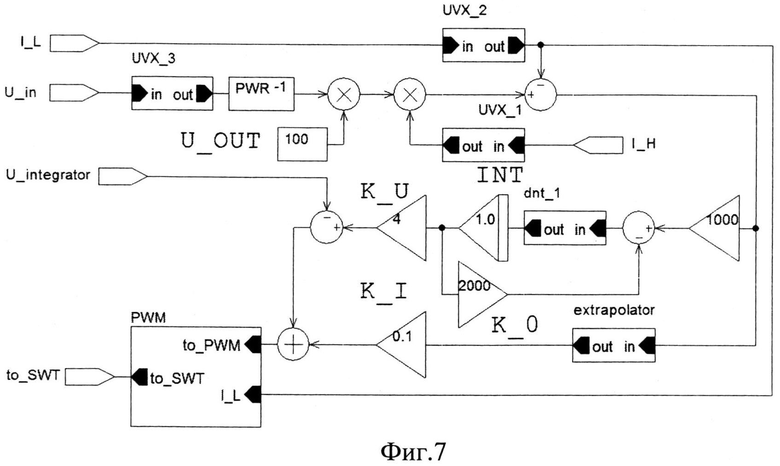
Состав иерархического блока control, содержащего модель широтно-импульсного модулятора и устройство формирования управляющего сигнала, приведен на фиг.7. Блок control содержит:
- порт ввода I_L для подачи информационного сигнала тока дросселя, порт ввода 1_Н для подачи информационного сигнала тока нагрузки, порт ввода U_ntegrator для подачи сигнала с блока integrator, порт вывода to_SWT для подачи управляющего сигнала на силовой ключ в блок SC;
- иерархический блок PWM, содержащий модель широтно-импульсного модулятора и устройства ограничения тока силовой цепи;
- иерархические блоки UVX_1, UVX_2, содержащие модель УВХ (устройство выборки хранения) и выполняющие выборку токов нагрузки и дросселя, соответственно; между собой блоки не различаются;
- иерархический блок extrapolator, содержащий модель линейного экстраполятора динамической составляющей тока конденсатора;
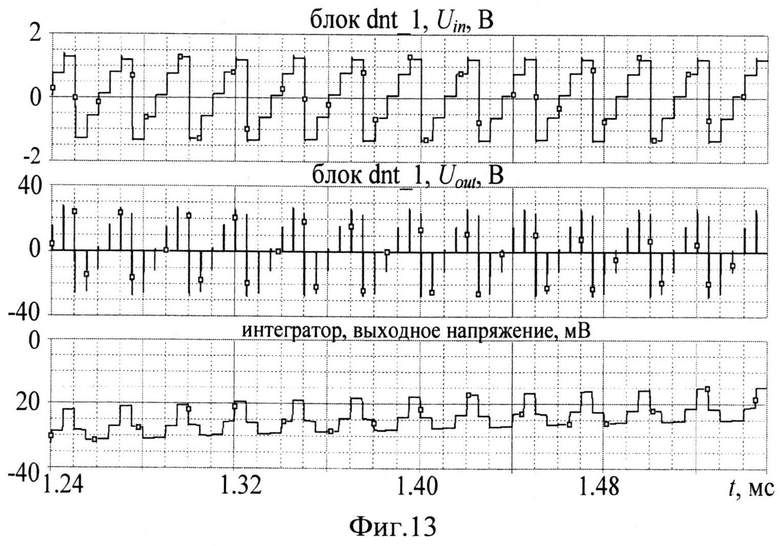
- иерархический блок dnt_1, содержащий модель устройства, позволяющего сымитировать работу цифрового интегратора;
- интегратор INT;
- усилители K_I, K_U, K_0 с коэффициентами усиления КI, КU, K0;
- устройства суммирования.
Состав иерархического блока UVX приведен на фиг.8. Рассмотрим работу блока UVX.
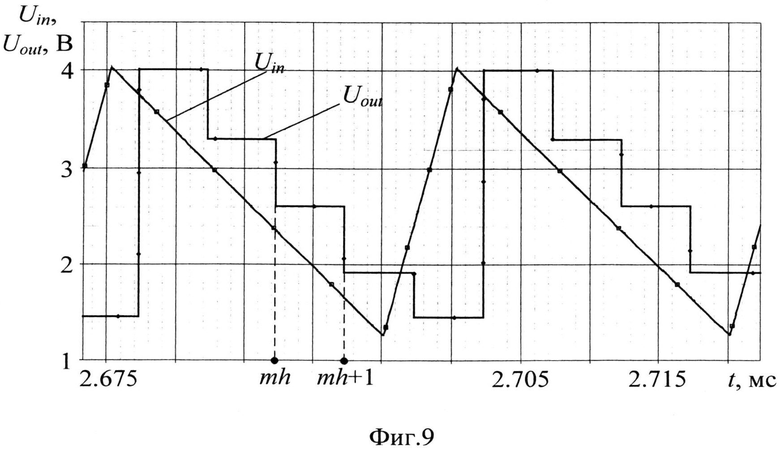
Через порт U_in в блок поступает входной сигнал. Генератор V1 выдает прямоугольный импульс с амплитудой 5 В и длительностью 0.2 мкс каждые 5 мкс с задержкой выдачи импульсов на 0.3 мкс в момент времени mh на ключ S1. Задержка необходима для последующего формирования в экстраполяторе текущего значения тока конденсатора IC. В конденсаторе С1 запоминается текущее значение поступающего сигнала. Генератор V2 формирует импульс, имеющий по сравнению с импульсом с генератора V1 задержку (2 мкс), необходимую для учета времени обработки информационного сигнала реальным АЦП, и этот импульс подается на ключ S2. С конденсатора С2 сигнал поступает на выход схемы. Временные диаграммы, поясняющие работу УВХ, приведены на фиг.9. На фиг.9 приняты обозначения: Uin - входной сигнал УВХ, Uout - выходной сигнал УВХ.
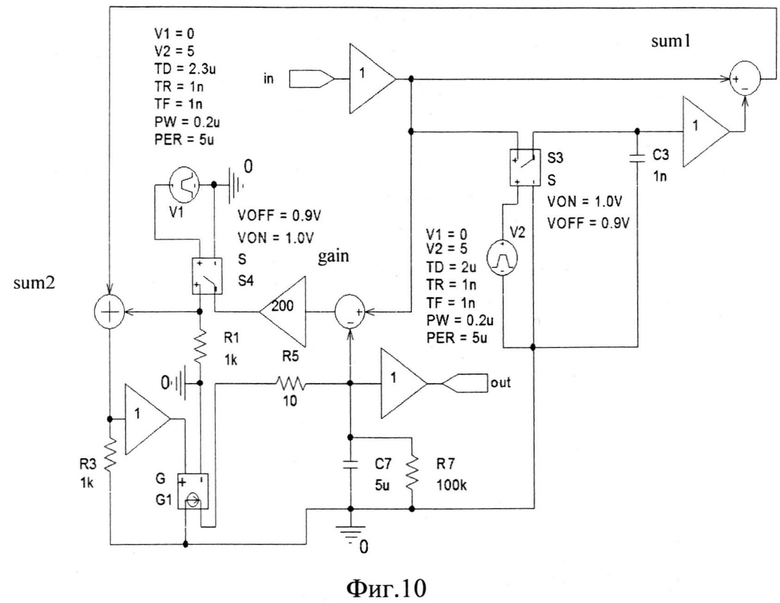
Состав иерархического блока extrapolator приведен на фиг.10. Рассмотрим его работу. В схеме присутствуют генераторы V1 и V2, определяющие моменты выборок mh и (m-1)h входного сигнала блока, причем генератор V1 имеет те же характеристики, что и генератор V1 в блоке УВХ. Генератор V2 отличается тем, что в нем нет задержки по выбору сигнала. При проведении процедуры экстраполяции происходит выборка входного сигнала экстраполятора в моменты времени mh и (m-1)h (в соответствии с импульсами генераторов V1 и V2), при этом в конденсаторе С2 блока UVX хранится значение сигнала, выбранного в момент времени mh (текущий сигнал Uin), а в конденсаторе С3 экстраполятора хранится значение сигнала, выбранного в момент времени (m-l)h (сигнал предыдущего периода дискретизации - «старый» сигнал Uold). Сигналы Uin и Uold поступают на сумматор sum1, где вычисляется разница между «старым» значением напряжения Uold и текущим Uin. Разница двух сигналов, по которой осуществляется прогноз изменения сигнала, подается на один из входов сумматора sum2. На другой вход сумматора sum2, по поступлении импульса на ключ S4, подается усиленный сигнал с конденсатора С7, предназначенный для корректировки сигнала экстраполяции в момент выборки нового значения входного сигнала. Результаты предварительных исследований показали, что для точной корректировки сигнала экстраполятора коэффициент передачи усилителя «gain» должен быть выбран равным 200. Итоговый результат с сумматора sum2 передается через источник тока, управляемый напряжением, G1 с коэффициентом преобразования 1 на конденсатор С7. Стоит отметить, что экстраполятор не будет работать без UVX, т.к. в UVX осуществляется запись текущего значения сигнала, необходимого для проведения экстраполяции.
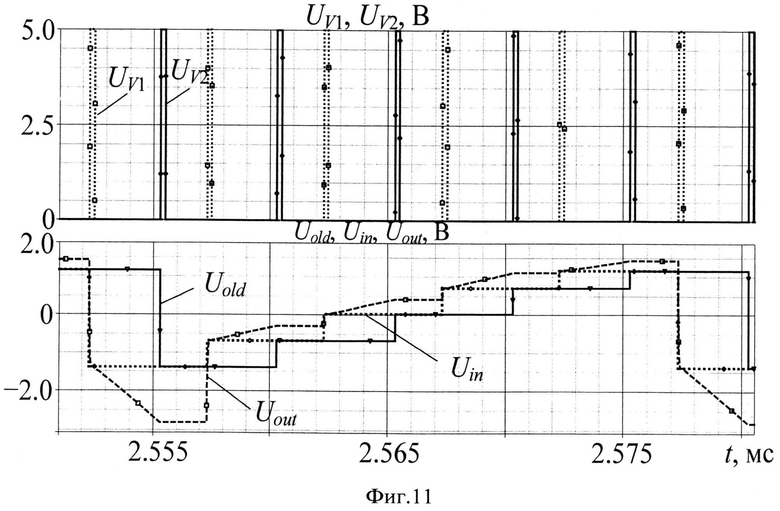
Временные диаграммы работы экстраполятора приведены на фиг.11. На фиг.11 приняты обозначения: UV1 - импульсные сигналы с генератора V1 (согласно фиг.11), UV2 - импульсные сигналы с генератора V2 (согласно фиг.11), Uin - значение входного сигнала экстраполятора в момент времени mh, Uold - значение входного сигнала экстраполятора в момент времени (m-1)h, Uout - выходной сигнал экстраполятора.
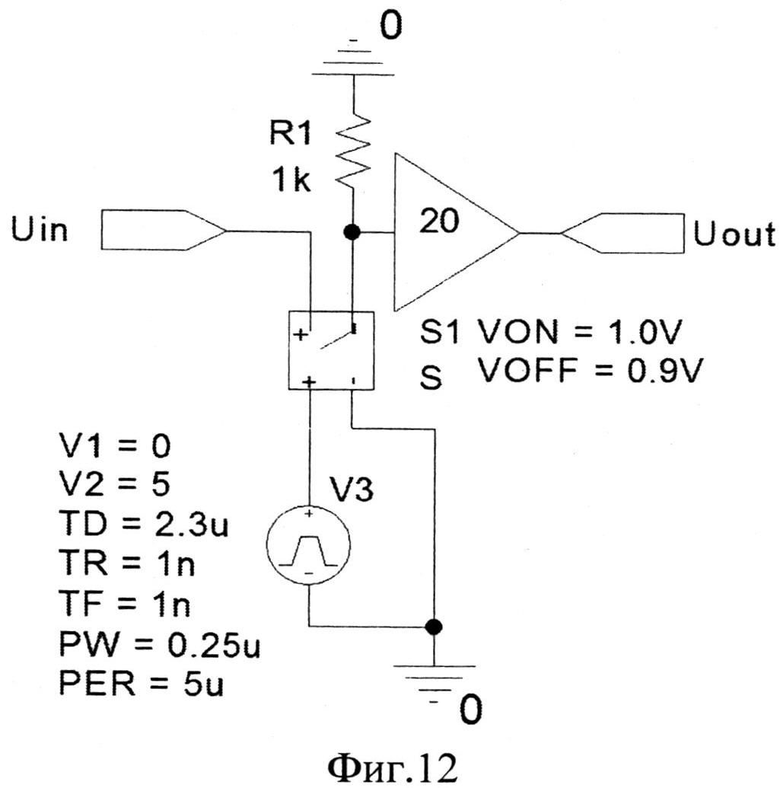
Состав иерархического блока dnt_1 представлен на фиг.12. Посредством ключа S1 и генератора V3 ширина входного импульса уменьшается в 20 раз, а затем усиливается в 20 раз. Тем самым обеспечивается неизменность вольт-секундной площади исходного сигнала при увеличении амплитуды, из-за чего интегратор, обрабатывающий сигнал с выхода блока dnt_1, формирует выходной сигнал с малыми фронтами. Временные диаграммы работы блока dnt_1 совместно с интегратором приведены на фиг.13.
Рассмотрим общую работу блока control. Через порт U_in поступает входное напряжение, которое возводится в степень -1 устройством PWR-1. Полученный результат умножается на сигнал выходного напряжения, поступающий с порта U_out. Таким образом определяется Kсв. Далее Kсв умножается на поступающий с порта 1_Н сигнал тока нагрузки. Из полученного произведения вычитается сигнал тока дросселя, поступающий с порта I_L, и в результате определяется ток конденсатора. Далее ток конденсатора поступает на усилитель K_1 и динамический наблюдатель напряжения на емкости конденсатора, организованный на основе интегратора INT, охваченного отрицательной обратной связью с усилителем K_0. С динамического наблюдателя напряжения сигнал поступает на усилитель K_U, затем из полученного сигнала вычитается поступающий сигнал с блока integrator. Полученные сигналы с усилителя K_1 и сумматора поступают на другой сумматор и общий сигнал подается в блок PWM для широтно-импульсной модуляции.
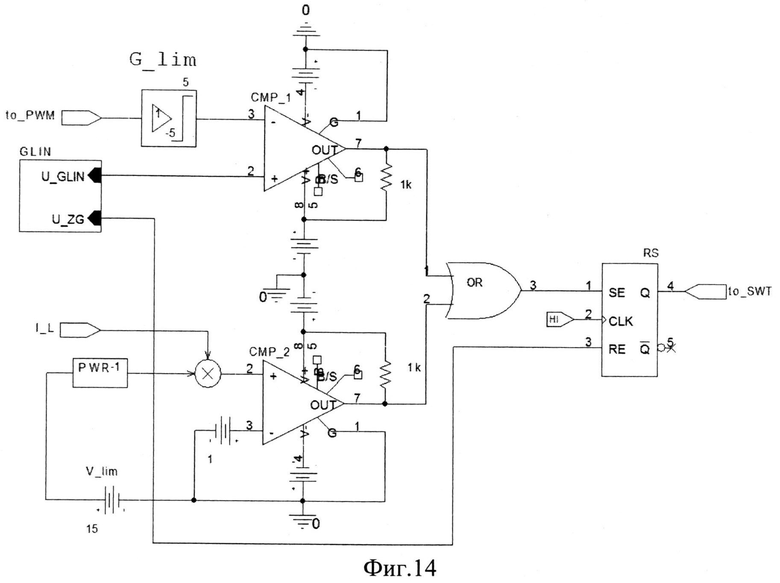
Состав иерархического блока PWM, содержащего модели широтно-импульсного модулятора и устройства ограничения тока силовой цепи, приведен на фиг.14. Блок PWM содержит:
- иерархический блок GLIN, включающий модель генератора опорного напряжения ШИМ;
- порт ввода to_PWM для передачи модулируемого сигнала из блока «control», порт ввода I_L для подачи сигнала тока дросселя на устройство ограничения тока силовой цепи, порт вывода to_SWT для передачи управляющего сигнала на силовой ключ;
- усилитель-ограничитель G_lim;
- компараторы СМР_1, СМР_2;
- логический элемент «ИЛИ» OR;
- RS-триггер;
- источник логического сигнала «высокого» уровня HI;
- источник напряжения V_lim, используемого для задания границы максимально возможного значения тока дросселя силовой цепи;
- устройство PWR -1 для возведения входного сигнала устройства в степень -1;
- устройства возведения в степень PWR2, PWR3, устройства перемножения для формирования формы опорного сигнала ШИМ;
- усилитель сигналов;
- резисторы;
- порта вывода U_ZG, U_GLIN.
На инвертирующий вход компаратора СМР_1 через порт to_PWM и усилитель с коэффициентом усиления -1 подается модулируемый сигнал. На неинвертирующий вход компаратора с блока GLIN подается опорное пилообразное напряжение, представляющее собой на участке роста сумму квадратичной и кубической параболы. Выходной сигнал компаратора СМР_1 подается на вход S RS-триггера через элемент «Логическое ИЛИ». На вход R триггера подается сигнал с задающего генератора. Таким образом, в схеме реализована модуляция переднего фронта импульса управления силовым ключом.
Через порт I_L в блок control подается сигнал об уровне тока дросселя силовой цепи, который сравнивается с заданным максимально возможным значением тока дросселя (уровнем ограничения) посредством источника V_lim. При достижении текущим значением тока дросселя заданного уровня ограничения происходит переключение компаратора СМР_2, и схема управления переходит в режим ограничения тока дросселя. Обратный переход в режим стабилизации выходного напряжения происходит при снижении тока дросселя до значений ниже уровня ограничения.
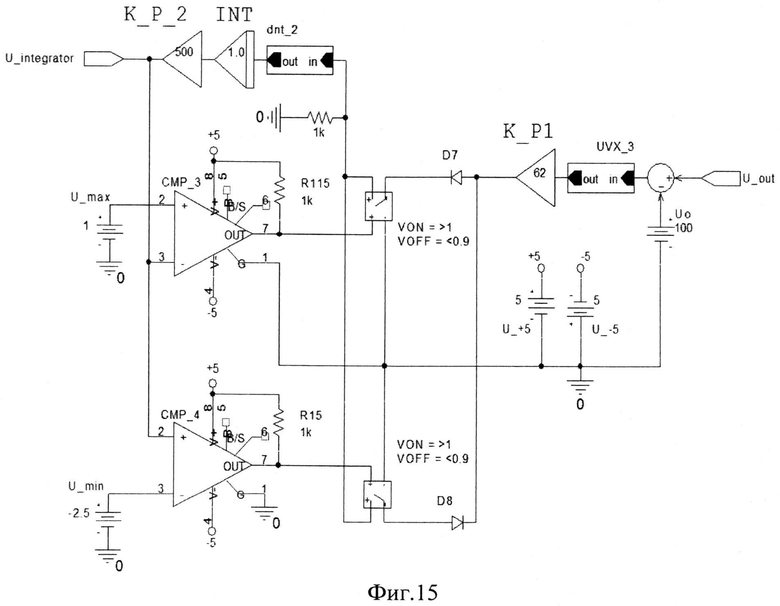
Состав иерархического блока integrator, содержащего модель интегратора сигнала рассогласования, приведен на фиг.15. Блок integrator содержит:
- иерархический блок UVX_3, по своему составу аналогичный рассмотренным блокам UVX_1, 2;
- иерархический блок dnt_2, по своему составу аналогичный рассмотренному блоку dnt_2;
- порт ввода U_out, порт вывода U_integrator;
- усилители К_Р_1, К_Р_2 для задания коэффициента Кр;
- интегратор INT;
- компараторы СМР_3, СМР_4;
- источники напряжения U_+5, U_-5 используемых для питания устройств в различных блоках модели;
- резисторы, диоды, ключи.
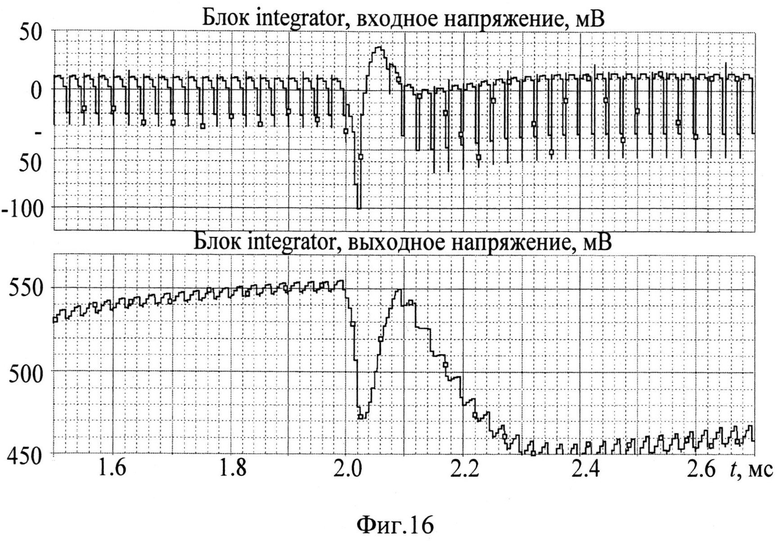
Сигнал выходного напряжения поступает через порт U_out. На выходе сумматора формируется сигнал рассогласования, который, проходя через блок UVX_3, поступает на усилитель K_Р1 и на блок dnt_2. Далее дискретный сигнал через интегратор INT, усилитель K_Р2 и порт вывода U_integrator сигнал с блока выводится на сумматор в блоке control. На компараторы СМР_3, СМР_4 поступает выходной сигнал блока integrator и сравнивается с уровнями ограничения, заданными источниками питания U_max, U_min. При выходе интеграла сигнала рассогласования за уровни ограничения, установленные указанными источниками питания, происходит переключение соответствующего компаратора в ноль, тем самым размыкается ключ, на который подается сигнал с компаратора. Происходит прерывание изменения уровня выходного сигнал блока integrator. Временные диаграммы работы блока integrator приведены на фиг.16.
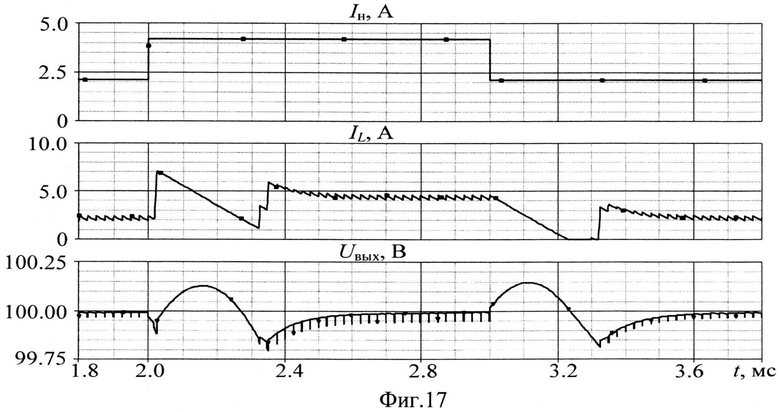
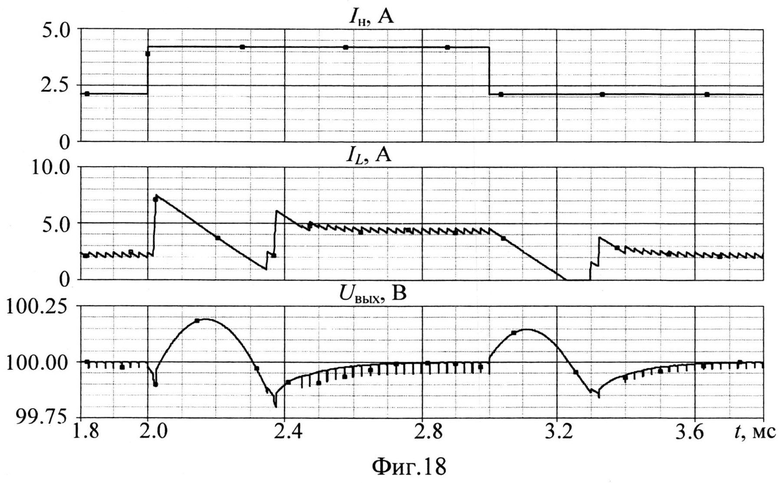
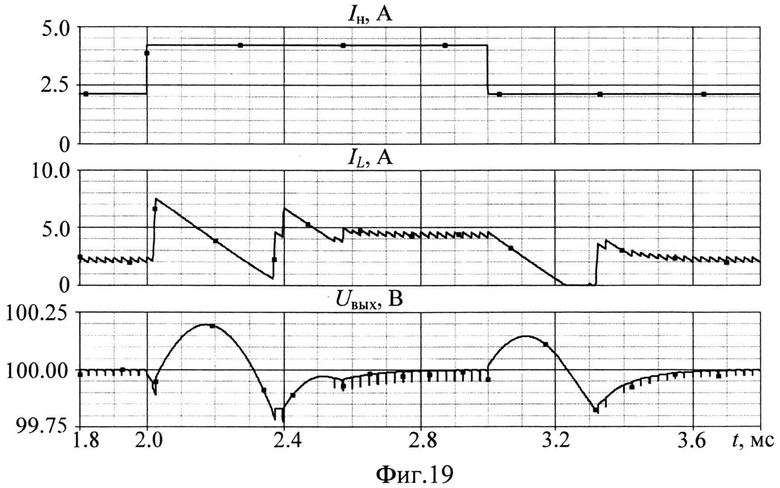
На фиг.17 приведены временные диаграммы, иллюстрирующие процессы в ИСН ПВ с аналоговой обработкой информационных сигналов. На фиг.18 и 19 приведены временные диаграммы, иллюстрирующие процессы в модели ИСН ПВ с управлением, реализованным в соответствие со структурной схемой, приведенной на фиг.2, при шести и пяти выборках сигналов, соответственно. На временных диаграммах приняты обозначения: IL и IH - токи дросселя и нагрузки, Uвых - напряжение на выходе ИСН.
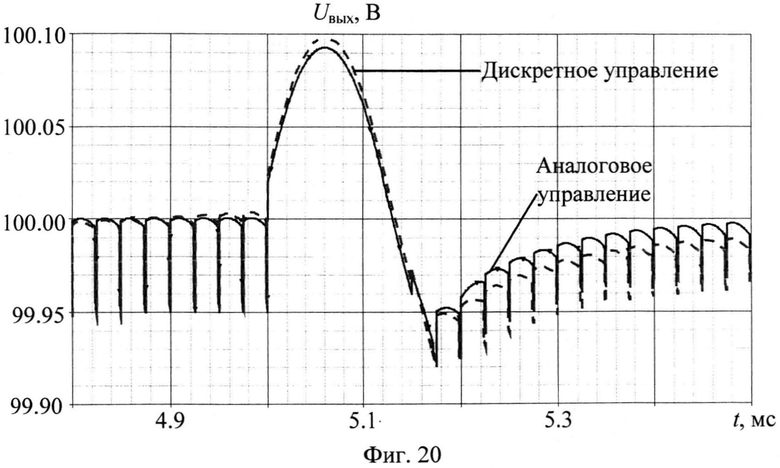
На временных диаграммах фиг.20 в качестве примера приведено напряжение на выходе ИСН ПВ при аналоговой и дискретной обработке информационных сигналов по пяти выборкам на периоде преобразования. Переходный процесс вызван отключением нагрузки мощностью 200 Вт. Напряжение на входе ИСН ПВ - 0.95 Uвых. Моменты коммутации выбраны таким образом, чтобы после отключения нагрузки управляющий сигнал Uy оказался в интервале наибольшей ошибки. Анализ диаграмм не показывает существенного увеличения длительности переходных процессов при дискретном управлении, наблюдается лишь незначительное увеличение амплитуды отклонения выходного напряжения.
Исследование процессов в ИСН показали работоспособность предлагаемого способа управления и достижение минимальной конечной длительности переходных процессов в 3-4 периода преобразования при ступенчатом изменении тока нагрузки, не нарушающем условие (1). При этом увеличение длительности переходных процессов и амплитуды отклонения выходного напряжения ИСН составило не более 5-7% по сравнению с реализацией закона управления ИСН аналоговым способом.
Литература
1. А.с. №1403037 СССР, кл. G 05 F 1/56. Способ стабилизации выходного напряжения импульсного стабилизатора/В.И.Иванчура, А.В.Манаков, Ю.В.Краснобаев, Б.П.Соустин. - Опубл. 15.06.88. Бюл.№22.
2. А.с. №440659 СССР, кл. G 05 F 1/56. Стабилизатор постоянного напряжения/Ю.А.Мордвинов и П.П.Гурский. - Опубл. 15.10.92. Бюл.№38.
3. Патент №2025764 РФ, кл. G 05 F 1/56. Способ управления импульсным стабилизатором/В.И.Иванчура, А.В.Манаков, Ю.В.Краснобаев, Б.П.Соустин. - Опубл. 30.12.94. Бюл.№24.
4. Патент №2238583 РФ, кл. G 05 F 1/56. Способ управления импульсным стабилизатором/Ю.В.Краснобаев, И.В.Алатов, Ю.А.Вторушин, Б.Н.Мамлин. - Опубл. 20.10.2004. Бюл. №34.
5. Соустин Б.П., Иванчура В.И., Чернышев А.И., Исляев Ш.Н. Системы электропитания космических аппаратов. - Новосибирск: Наука. Сибирская издательская фирма, 1994. - 318 с.
6. Цыпкин Я.З. Теория линейных импульсных систем. - М.: Физматгиз, 1963. - 968 с.
7. А.В.Оппенгейм, Р.В.Шафер. Цифровая обработка сигналов. - М.: Связь, 2004. - 448 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2003 |
|
RU2239225C2 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2011 |
|
RU2460114C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ | 2002 |
|
RU2238583C2 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2016 |
|
RU2621071C1 |
| Способ управления зарядным устройством с импульсным принципом действия | 2023 |
|
RU2813604C1 |
| Способ управления импульсным стабилизатором напряжения | 2021 |
|
RU2764783C1 |
| Способ стабилизации выходного напряжения импульсного стабилизатора | 1985 |
|
SU1348796A1 |
| Способ стабилизации выходного напряжения импульсного стабилизатора | 1985 |
|
SU1376069A1 |
| Импульсный стабилизатор напряжения | 1985 |
|
SU1372288A1 |
| Драйвер для светодиодного светильника | 2020 |
|
RU2742050C1 |

Изобретение относится к области преобразовательной техники и может быть использовано для управления импульсными стабилизаторами постоянного напряжения повышающего типа с широтно-импульсной модуляцией, имеющими малые длительность переходных процессов и статическую ошибку стабилизации выходного напряжения при дискретной обработке информационных сигналов. Технический результат заключается в повышении качества выходного напряжения ИСН ПВ в динамических и статических режимах работы при дискретной обработке его информационных сигналов. Указанный технический результат достигается тем, что согласно изобретению: измеряют напряжение Uвых на выходе стабилизатора, входное напряжение Uвх, токи дросселя IL и нагрузки IН; производят выборку этих сигналов на каждом периоде преобразования в определенные моменты времени h; вычисляют сигнал «ток конденсатора»; производят экстраполяцию его UHX(mh) динамической составляющей, а для обеспечения статической точности выходного напряжения ИСН формируют сигнал рассогласования по наряжению и производят его цифровое суммирование с накоплением (производят цифровое интегрирование). 20 ил.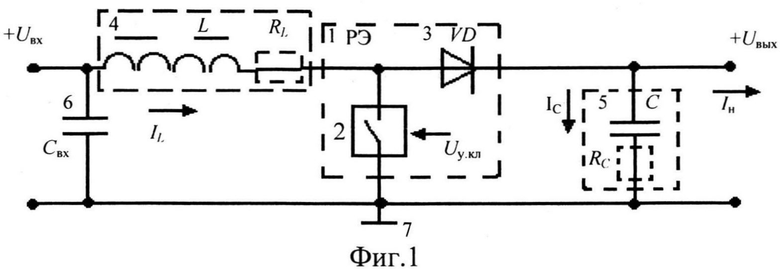
Способ управления импульсным стабилизатором напряжения, содержащим дроссель с индуктивностью L и диод, включенные последовательно между входом и выходом стабилизатора, управляемый электрический ключ, включенный между общим проводом стабилизатора и точкой соединения дросселя и диода, конденсатор с емкостью С, включенный между выходом и общим проводом стабилизатора, заключающийся в том, что измеряют напряжение Uвых на выходе стабилизатора, измеряют входное напряжение Uвх, токи дросселя IL и нагрузки IH, получают второй сигнал, умножая первый сигнал на коэффициент Kp, путем прерывания интегрирования ограничивают диапазон изменения третьего сигнала по значениям его максимальных отклонений в динамических режимах, не приводящих к прерыванию модуляции, суммарный сигнал получают, умножая четвертый сигнал и пятый сигнал на коэффициенты KU и KI соответственно, и суммируя инверсные значения сигналов, полученных в результате умножения, а также вычитая третий сигнал, причем в случае модуляции переднего фронта импульсов управления управляемым электрическим ключом сигнал управления получают, инвертируя результирующий сигнал, а в случае модуляции заднего фронта импульсов управления управляемым электрическим ключом сигнал управления принимают равным результирующему сигналу, при этом
где RC - внутреннее активное сопротивление конденсатора,
а нелинейное опорное напряжение модулятора
где Uл(T) - амплитудное значение нелинейного опорного напряжения модулятора, 0<t<Т,
сигналом управления формируют импульсы управления управляемым электрическим ключом по принципу широтно-импульсной модуляции с блокировкой модулятора в момент формирования модулируемого фронта импульса, отличающийся тем, что дополнительно производят выборку сигналов тока дросселя IL, тока нагрузки IН, выходного Uвых и входного Uвх напряжений на каждом периоде преобразования в определенные моменты времени (mh), где
h=Т/l,
l=2, 3, 4, … - количество интервалов дискретизации,
T - период преобразования,
m=1,2,3, …,
формируют сигнал рассогласования по напряжению ε(mh), вычитая эталонное напряжение из напряжения на выходе стабилизатора Uвых (mh), принимают его равным первому сигналу, третий сигнал вычисляют как

| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ | 2002 |
|
RU2238583C2 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2003 |
|
RU2239225C2 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ | 1988 |
|
RU2025764C1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |

