Изобретение относится к области автоматики и может использоваться в автоматизированных системах телеуправления подвижными объектами, в частности подъемнотранспортными механизмами.
Известно устройство для определения и индикации положения подвижного объекта содержащее три установленных на объекте индуктивных датчика, два, из которых включены в смежные плечи резонансного моста, магнитные шуАты, питаюш,ий трансформатор, одна из вторичных обмоток которого подключена к одной из диагоналей резонансного моста и через регулируемый резистор к третьему индуктивному датчику, выпрямительный мост, с одной из диагоналей кото рого соединена другая вторичная обмотка питающего трансформатора, усилитель, ключи, реле с замыкающими контактами, где
два реле включены в смежные плечи выпрямительного моста, к другой диагонали которого через один из ключей подключен выход, усилителя, с другой диагональю резонансного моста соединен вход усилителя, в цепь питания третьего {)еле вклнзчены
ра.змыкающйёк6;НтактьГ других реле и другой ключ, управляющий вход, которого подключен к, выходу третьего индуктивного датчика, с направлением магнитного потока, встречным по отношению к направлениям магнитных потоков других индуктивных датчиков, а оба ключа через другие замыкающие контакты соответствующих реле охвачены положительной обратной связью 1.
Недостаток данного устройства - сложность конструкции.
Наиболее близким к изобретению техническим решением является устройство для определения местоположения подвижных объектов с фиксированным путем перемещения, содержащее расположенный на подвижном объекте датчик с приемной и передающей обмотками, генератор частоты, выход которого соединен со входом ключа, выход которого через усилитель подключен к передающ..ей обмотке датчика, расположенные на пути перемещения, датчики с приемной и передающей обмотками и дешифратор 2.
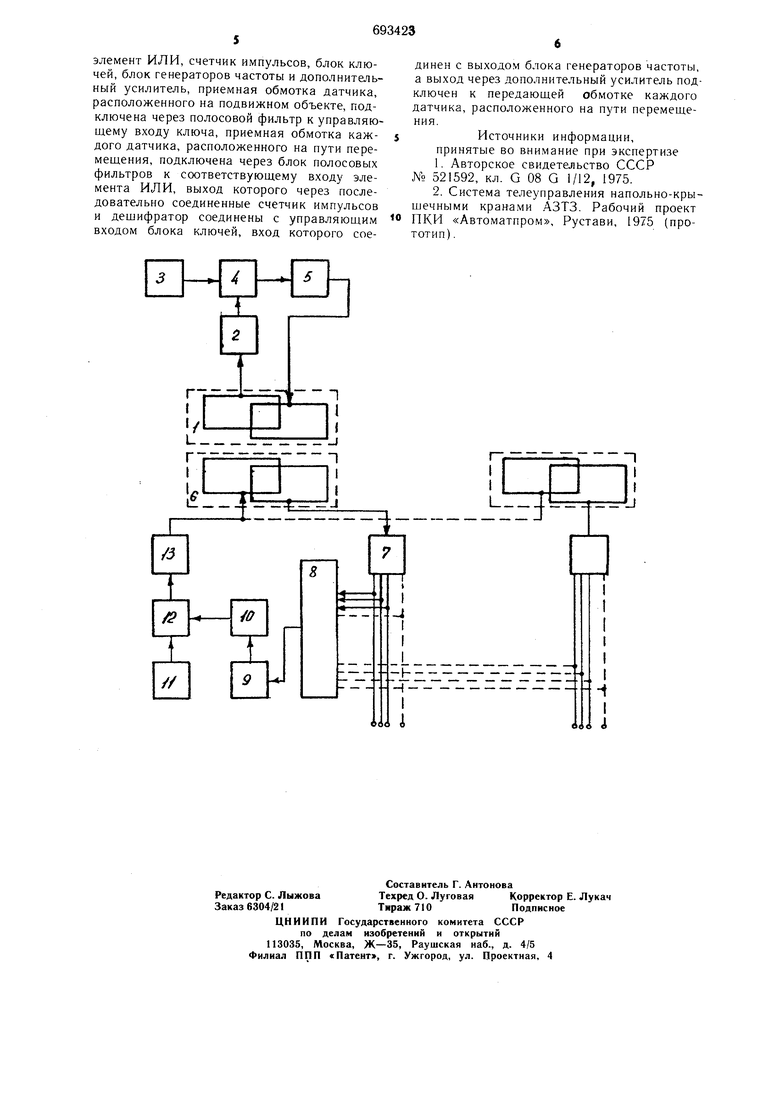
Недостаток известного устройства заключается в том, что при нахождении двух и более подъемно-транспортных механизмов В пролете, оснащенном датчикамиопределе ния местоположения, аналогично описанному, определить местопол ожение каждого из подъем.но-транспортных механизмов невозможно., . ., „, Целью изобретения является обеспечение возможности определения местоположения каждого из двух и более подъемнотранспортных механизмов в пролете, т. е. расширение функциональных возможностей устройства. Поставленная цель достигается тем, что в устройство введены полосовой фильтр, блок полосовых фильтров, элемент ИЛИ, счетчик импульсов, блок ключей, блок генераторов частоты и дополнительный усилитель, приемная обмотка датчика, расположенного на подвижном объекте, подключена через полосовой фильтр к управляющему входу ключа, передающая o6Mdflta jraf4HKa, раСНЬлЬЯсенного на, tiytH перемещения, подключена через блок полосовых фильтров к соответствующему входу элемента ИЛИ, выход которого через последовательно соединенные счетчик импульсов и дешифратор сое динен с управляющим входом блока ключей, вход которого соединен с выходом блока генераторов частоты, а выход через дополнительный усилитель подключен к передающей обмотке датчика, расположенного на пути перемещения. На чертеже представлена функциональная схема устройства для определения место положения подвижных объектов с фиксированным путем перемещения. Устройство содержит расположенньш на подвижном объекте датчик 1, полосовой фильтр 2, генератор частоты 3, ключевую схему 4, усилитель 5, расположенный на нути перемещения датчик б, блок полосовых фильтров 7, элемент ИЛИ 8, счетчик импульсов 9, дешифратор 10, блок, генераторов частоты 11, блок ключей 12, усилитель 13. В исходном состоянии со счетчика импульсов 9 сигнал поступает на вход дешифратора 10, выходы которого подключены к соответствующим управляющим входам блока ключей 12. С выхода дешифратора 10, соответствующего исходному состоянию устройства, сигнал поступит на управляющий вход ключевой схемы блока ключей 12, которая подключит соответствующий генератор блока генераторов частоты 11 к усилителю 13. Усиленный сигнал поступит на передающую обмотку датчика 6. Сигнал, излучаемый передающей обмоткой напольного датчика 6, будет принят приемной обмоткой датчика 1 и поступит на вход полосового фильтра 2. Если частота настройки полосового фильтра 2, установленного на данном механизме, совпадает с частотой прищедщего сигнала, этот сигнал с выхода полосового ф льтра 2, воздействуя на управляющий вход ключа 4; подключит генератор частоты 3 к усилителю 5. С выхода усилителя 5 усиленный сигнал поступит на передающую обмотку датчика 1. Сигнал, излучаемый передающей обмоткой датчика 1, будет принят приемной обмоткой датчика 6. Принятый сигнал поступит на вход блока полосовых фильтров 7. Количество полосовых фильтров в блоке определяется количеством подвижных механизмов в пролете, на которые установлены крановые комплекты аппаратуры. Причем частота настройки полосового фильтра напольного комплекта соответствует частоте настройки генератора частоты соответствующего кранового комплекта. Сигнал с частотой, соответствующей частоте настройки одного из полосовых фильтров блока полосовых фильтров 7, создает на одном из выходов блока потенциальный сигнал, который постулит на координатные выходы устройства, а через элемент ИЛИ 8 на вход счетчика импульсов 9. Счетчик импульсов 9 изменит свое состояние, благодаря чему к усилителю 13 через соответствующую ключевую схему блока ключей 12 окажется подключенным генератор блока генераторов частоты 11, частота настройки которого соответствует частоте настройки полосового фильтра 2 следуюШего кранового комплекта. , Этот крановый комплект работает аналогично описанному ранее. Таким образом,.ответный сигнал каждого кранового комплекта вызывает «перемещение управляющего сигнала на выходе дещифратора .10 на единицу. Следует заметить, что количество напольных датчиков в устройстве не ограничено, также как и количество подвижных, механизмов в пролете. Использование предлагаемого устройства в автоматизированных системах телеуправления подвижными механизмами позволит избежать организации отдельных каналов связи для каждого из подвижных механизмов с целью определения их местоположения, что снизит стоимость автоматизированной системы управления. Формула изобретения Устройство для определения местоположения подвижных объектов с фиксированным путем перемещения, содержащее расположенный на подвижном объекте датчик с приемной и передающей обмртками, гецератор частоты, выход которого соединен со входом ключа, выход которого через усилитель подключен к передающей обмотке датчика расположенные на пути перемещения датчики с приемной и передающей обмотками и дещифратор, отличающееся тем, ч%, с целью расширения функциональных возможностей устройства, в него введены полосовой фильтр, блок полосовых фильтров.
элемент ИЛИ, счетчик импульсов, блок ключей, блок генераторов частоты и дополнительный усилитель, приемная обмотка датчика, расположенного на подвижном объекте, подключена через полосовой фильтр к управляющему входу ключа, приемная обмотка каждого датчика, расположенного на пути перемещения, подключена через блок полосовых фильтров к соответствующему входу элемента ИЛИ, выход которого через последовательно соединенные счетчик импульсов и дещифратор соединены с управляющим входом блока ключей, вход которого сое693423
динен с выходом блока генераторов частоты, а выход через дополнительный усилитель подключен к передающей обмотке каждого датчика, расположенного на пути перемещения.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 521592, кл. G 08 G 1/12, 1975.
2.Система телеуправления напоЛьно-крыщечными кранами АЗТЗ. Рабочий проект ПКИ «Автоматпром, Рустави, 1975 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство телеуправления подвижнымОб'ЕКТОМ | 1979 |
|
SU842909A1 |
| УСТРОЙСТВО ДЛЯ УЧЕТА РЕЙСОВ АВТОСАМОСВАЛОВ | 2002 |
|
RU2244341C2 |
| Система дистанционного контроля поставки материальных и технических ресурсов для восстановления объектов инфраструктуры | 2020 |
|
RU2734064C1 |
| Устройство для приема и передачи информации о подвижных объектах | 1989 |
|
SU1605274A2 |
| СИСТЕМА УПРАВЛЕНИЯ | 2008 |
|
RU2372640C1 |
| СИСТЕМА УПРАВЛЕНИЯ | 2010 |
|
RU2431173C1 |
| РАДИОДАТЧИК | 2009 |
|
RU2419811C2 |
| СИСТЕМА РАДИОВЕЩАНИЯ | 2012 |
|
RU2490800C1 |
| СИСТЕМА УПРАВЛЕНИЯ | 2009 |
|
RU2401450C1 |
| Комплексная система телеуправления | 1977 |
|
SU682934A1 |
