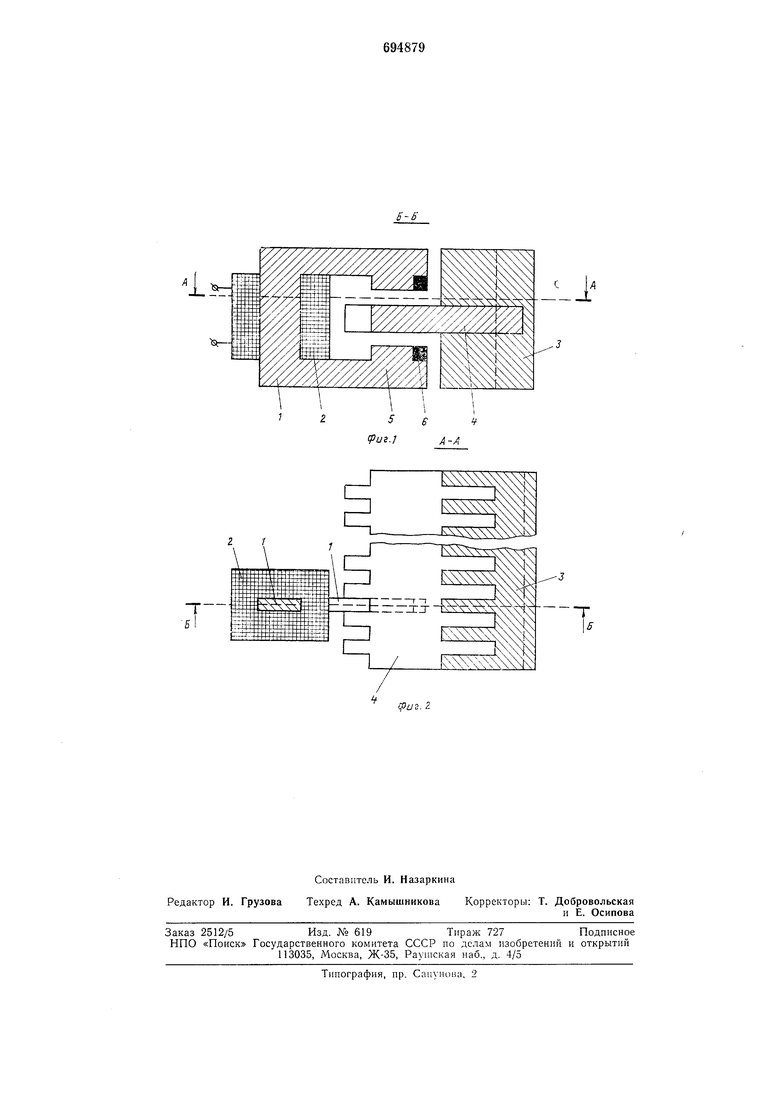
ющей вставкой 4, профилированной зубцами таким образом, что против зубчатых выступов якоря 3 расположены ее впадины. Вставка 4 охвачена выступами 5 считывающего элемента 1, которые отделены от якоря 3 экранирующей накладкой 6.
Индуктивный преобразователь перемещений работает следующим образом.
Зубцы якоря 3, совершая рабочие перемещения (по оси, перпендикулярной к плоскости чертежа), поочередно приближаются к торцам считывающего элемента 1. Происходит периодическое изменение маг нитной проводимости считывающего элемента 1 и, следовательно, индуктивности обмотки 2. В случае приближения зубцов якоря 3 к торцам считывающего элемента 1 его магнитная проводимость возрастает, а в случае удаления зубцов якоря 3 она уменьшается.
Рассмотрим нерабочие смещения якоря 3 в положении, когда один из его зубцов находится против торца магнитопровода элемента 1. В этом положении магнитная проводимость цепи считывающего элемента 1 максимальна; от элемента 1 к якорю 3 проходит максимальный магнитный поток, дополняемый потоком, который замыкается между верхним и нижним магнитостержнями элемента 1 через впадину вставки 4. Вместе с изменением зазора между торцом элемента 1 и зубцом якоря 3 изменяется площадь зазора между выступами 5, перекрываемая непрофилированиой частью (основанием) вставки 4.
Поскольку приращения этих изменений имеют разные знаки, в указанном положении якоря 3 достигается стабилизация величины индуктивности обмотки 2. Так, например, при удалении якоря 3 в сторону торцов от магнитопровода элемента 1 магнитная проводимость участка торец элемента 1 - зубец якоря 3 уменьшается, а магнитная проводимость участка между выступами 5 возрастает. Накладка 6 препятствует замыканию магнитного потока с боковых поверхностей выступов 5 на якорь 3, минуя участок между выступами, т. е. без накладок 6 эффект вводимой компенсации практически отсутствовал бы.
Рассмотрим положение якоря 3, когда торцы считывающего элемента 1 находятся в промежутке между зубцами якоря, положение их наибольшего взаимного удаления. Оно соответствует минимальному значению проводимости магнитной цепи элемента 1, в этом положении вставкой 4 перекрыты как зазор между выступами 5, так и зазор между верхним и нижним стержнями элемента 1. При нерабочих смещениях якоря 3 здесь также происходят разнозначные изменения магнитной проводимости на двух участках: торец элемента 1 - впадина якоря 3; участок между верхним и нижним продольными стержнями элемента 1, перекрытый выступом вставки 4. В отличие от описанной компенсации, произведенной на уровне максимальной магнитной проводимости элемента 1, в данном случае приращения проводимости рабочего участка торец элемента 1 - впадина якоря имеют меньшие значения, что объясняется большим удалением магнитопровода якоря 3 от торцов элемента 1. Однако поскольку между верхним и стержнями элемента I (по сравнению с расстоянием между выступами 5) высота зазора увеличена, компенсационные приращения проводимости также имеют меньшие значения.
Таким образом, предложенное устройство обеспечивает компенсацию нерабочих смещений в двух положениях якоря, соответствующих крайним значениям индуктивности обмотки считывания.
Экономический эффект от использования предложенного технического решения обусловлен указанными его техническими преимуществами.
Формула изобретения
Индуктивный преобразователь перемещений по авт. св. № 580571, отличающийся тем, что, с целью повышения точности преобразователя, в него введена экранирующая накладка, которая размещена на торцах магнитопровода, а экранирующая вставка снабжена зубцами, расположенными внутри считывающего элемента. Источники информации,
принятые во внимание при экспертизе
1.Агейкин Д. И. и др. Датчики контроля и регулирования. «Машиностроение, 1965, с. 99.
2.Авторское свидетельство СССР Яо 580571, кл. G 08С 9/04, 1975 (прототип).
Л
(Риъ.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Индуктивный преобразователь перемещений | 1975 |
|
SU580571A1 |
| Индуктивный преобразователь перемещений в код | 1985 |
|
SU1307589A1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1992 |
|
RU2079952C1 |
| Индуктивный преобразователь перемещений в код | 1983 |
|
SU1160567A1 |
| Электромеханический привод | 1987 |
|
SU1644254A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ДЕФЕКТОСКОПИИ | 1993 |
|
RU2063025C1 |
| ТОРЦОВАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА СО ВСТРОЕННЫМ ТОРМОЗНЫМ УСТРОЙСТВОМ | 2004 |
|
RU2262175C1 |
| Трансформаторный преобразователь перемещений | 1985 |
|
SU1357693A1 |
| ДАТЧИК ПОЛОЖЕНИЯ | 2000 |
|
RU2197712C2 |
| РЕАКТИВНАЯ МАШИНА | 2010 |
|
RU2412519C1 |