I
Изобретение относится к медицине, а именно к медицинской технике.
Известно устройство для исследования функцки равновесия и биомеханики движений человека, содержащее подвижную платформу, стабил: лограф, систему фиксации человека, привод, ме-, ханизм изменения устойчивости, регистрирующую аппаратуру и механизм передачи информации 1
Однако известное устройство имеет недостаточную точность исследования цараметров движений человека..
Целью изобретения является повыщение точности исследования функции равновесия, биомеханики движений человека.
Поставленная цель достигается тем, что механизм изменения устойчивости выполнен в форме полусферы с вертикальной осью вращающегося диска, соединенных гибкими тросами, причем внутри полусферы на вертикальной оси размещен груз, а стабиллограф установлен на вертикальной оси с возможностью продольного перемещения.
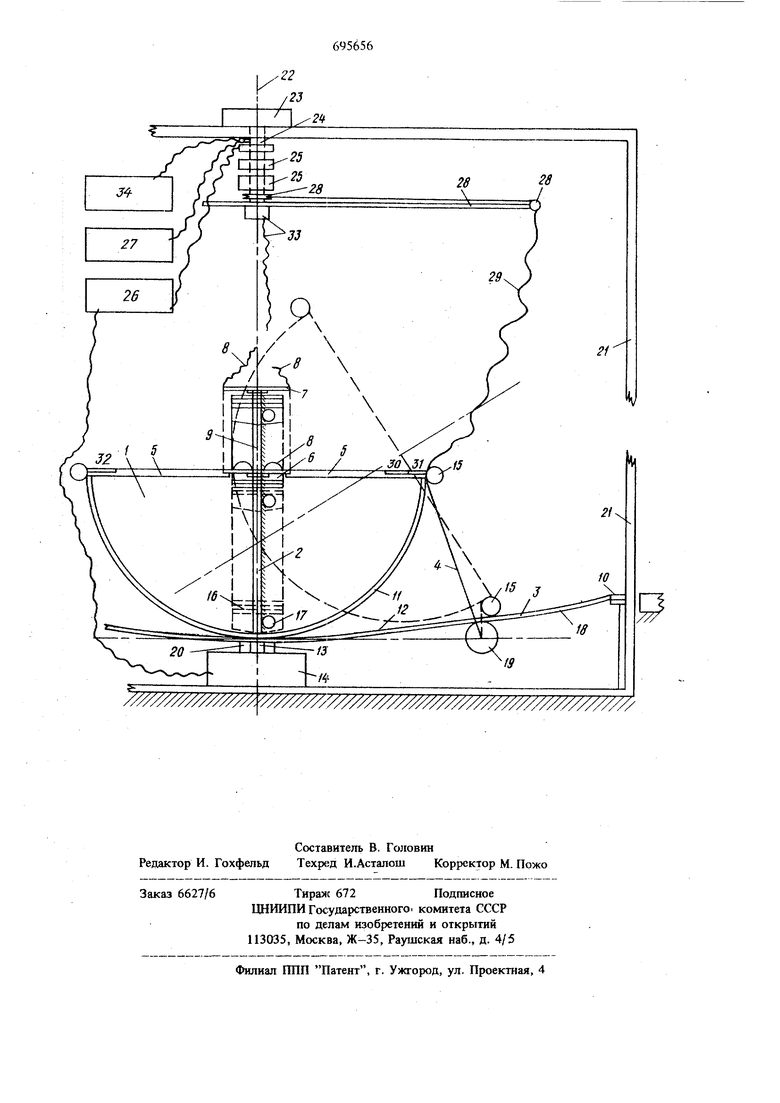
На чертеже изображено предлагаемое устройство для исследования функции равновесия и биомеханики движений человека. Оно содержит механизм изменения устойчивости, выполненный в виде полусферы 1 с вертикальной осью 2 и вращающегося диска 3, соединешдах гибкими
тросами 4, подвижную платформу 5 с расположенным в центре ее над отверстием 6 стабиллографом 7 и системой 8 фиксащш человека.
В центре своей внутренней стороны стабиллограф 7 жестко соединен и опирается на выдвижную часть 9 вертикальной осью 2, а периметр стабиллографа опирается на край отверстия 6 подвижной платформы 5 полусферы 1. Bepxyuiка полусферы 1 своей точечной опорой опирается на вращающийся диск 3 сферической формы с плоской поверхностью в центре и со скользящей опорой 10 по периметру. Внешняя поверхность 11 полусферы 1 и внутренняя поверхность 12 диска 3 образуют неустойчивую опору и покрыты материалом, обеспечивающим малый
коэффициент трения. В центре диск 3 опирается и закреплен на оси 13 вращения привода 14 подвижной платформы 5. Периметр подвижной плат3формы 5 снабжен предохранительным амортизатором 15 (например га1евматическим). Механизм управления положением центра тяжести устройства установлен по оси симметрии подвижной платформы 5 внзтри полусферы 1 и выполнен в ввде груза 16 (например, свинцовые плиты) и электромеханизма 17, перемещающихся вдоль вертикальной оси 2 и ее выдвижной части 9 в зависимости от показаний ста(5ш1лографа 7, работающего в режиме динамографа. На внешней поверхности 18 диска 3 сферической формы расположены симметр1гчно по диагонали друг против друга четыре реверсивных электродвигателя 19, осуществляющих управление параметрами движения подвижной Платформы 5. Две пары диаметрально противопопожз{ых точек края подвижной платформы 5 посредством тросов 4 через соответствующие Прорези в диске 3 соединены с редукторами электродвигателей 19, электропитание которых осуществляется через коллектор 20 вала привода 14 электромеханизма вращения подвиясной платформы 5. В центре констр;укции металлической рамы 21 на неподвижной оси 22 симметрии устройст;ва расположен электродвигатель 23, на валу 24 ;которого закреплены экранированные коллекто :ры 25 с токосъе таыми кольцами для передачи : электропитания от источ шка 26 постоянног1Э тока, а такясе медицинской и технической информатдаи к регистрирующей аппаратуре 27. Вращение закрепленных на валу 24 электродвигателя 23 токосъемных колец, переклад1Шы 28 с блоком и механизмом приема и отдачи экранированного кабеля 29 синхро {изировако с вращением привода 14 вращения подвижно платформы 5. Разъемы 30, 31 питания и отведения для по соединения кабеля и коммутационные коло.цси 32 находятся на противоположных краях подви ;ной платформы S. Механизм 33 страховки за -креплен на неподв1гашой оси симметрии устройства. Пульт 34 управления имеет индикаторные приборы контроля и элементы управления всеми режимами работы устройства. Устройство для исследования функции равновесия и биомеханики движений человека функционирует как устой швая и неустойч пзая опора. Перед проведе гаем исследований к устройст ву подключается электропитание от источника. 26 постоянного тока. Для этого кабель 29 питания и отведения биоэлектрической и кой сигнализации на регистрирующую аппаратуру 27 подключают к разъемам 30 и 31 поднижной платформы 5. Полусфера 1 устанавливается в устойчивое положение путем включения на пульте 34 управ 6 ления электродвигателей 19 механизма управления параметрами движения подвижной платформы 5. При этом все четыре электродвигателя 19, работая синхронно, производят равномерное натяжение тросов 4 с четырех сторон полусферы и обеспечивают ей устойчивое, неподвижное состояние с расположением подвижной платформы в горизонтальной плоскости. По достижении необходимой заданной степени натяжения тросов 4 электродвигатели 19 автоматически отключаются, сохраняя достигнутое натянутое состоянле тросов и устойчивое положение полусферы. Испытуемый встает в центре стабшшографа 7, который сначала включается на режим динамографа для взвешивания испытуемого с автоматической регуляцией положения общего центра тяжести устройства. Производится уравнивание условий равновесия для испытуемых разного веса и роста к заданной степени неустойчивого равновесия путем нахождения нового уровня общего центра тяжести (ОЦТ) относительно его исходного положения. При этом электромеханизм 17 автоматически перемещает груз 16 по оси 2 вверх или вниз и фиксирует его. Визуальная оценка веса испытуемого и положения ОЦТ устройства производится по показаниям индикаторных приборов пульта управления. Таким образом, путем регулирования уровня положения ОЦТ устройства перед исследованием каждого испытуемого достигаются равнозначные условия сохранения равновесия устройства при балансировании испытуемых с разным весом в диапазоне любой выбранной для исследования степени неустойчивого равновесия. Для этого экспериментатор устанавливает требуемую степень неустойчивого равновесия, соответствующую одному из условно принятых уровней различной степени неустойчивого равновесия: высокой, средней и низкой степени. При этом чем выще уровень ОЦТ устройства с человеком, тем большая степень неустойчивости устройства достигается. Установку и изменения степени неустойчивого равновесия производят как до, так и в процессе исследования на основании расчетных таблиц для каждой степени неустойчивого равновесия, учитывающих поправку разницы веса испытуемых. Различный уровень ОЦТ достигается путем перемещения груза 16 (или изменения ее количества) вверх или вниз по вертикальной оси 2 и ее выдвижной части 9. В случае, когда предполагается провести исследования в положении сидя, экспериментатор включает механизм управления положением стабшшографа 7. При этом стабиллограф 7, закрепленный на выдвижной части 9 вертикальной оси 2, устанавливается на необходимом уровне от поверхности подвижной площадки 5 полусферы 1. После окончания регулировки положения IОЦТ стабиллограф переключается на свой режим работы. Затем производится требуемая сво бодная фиксация человека в одной точке (стопы ног или таз) или жесткая фиксация в двухтрех точках (дополнительно грудь). Значительным этапом подготовки является балансировка всего устройства с человеком, зафиксированным в заданнном положении. С целью проверки отбалансированного состояния устройства с человеком создаются условия низкой степени неустойчивости и перевод полусферы из устойчивого состояния в неустойчивое. Оценкой хорошо отбалансированной системы платформа-человек является отсутствие спонтанных отклонений полусферы в какую-либо
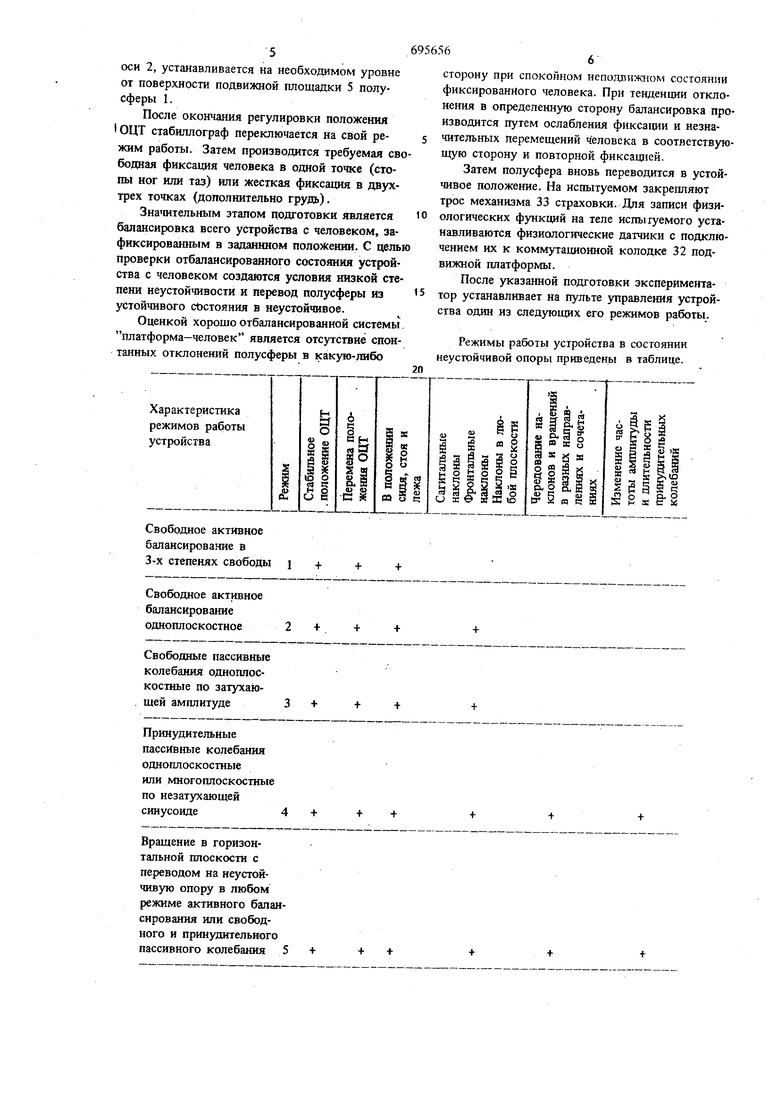
Характеристика режимов работы устройства
§
юо
Sg
Uе
Свободное активное балансирование в 3-х степенях свободы
Свободное активное
балансирование
одноплоскостное
Свободные пассивные колебания одноплоскостные по затухающей амплитуде3
Принудительные
пассИв1П)1е колебания
одноплоскостные
или многоплоскостные
по незатухающей
синусоиде4
Вращение в горизонтальной плоскости с переводом на неустойчивую опору в любом режиме активного балансирования или свободного и принудительного пассивного колебания 5
sfli
i S
о. 1.
« о
I I
Ǥ
и ж
а
Т
§1 §1
i s
«3 о
йех§-§ Я 10
л д
+ +
+ +
+ +
+ +
+ сторону при спокойном неподвижном состоянии фиксированного человека. При тенденции отклонения в определенную сторону балансировка производится путем ослабления фиксации и незначительных перемещений человека в соответствующую сторону и повторной фиксацией. Затем полусфера вновь переводится в устойчивое положение. На испытуемом закрепляют трос механизма 33 страховки. Для записи физиологических функций на теле испытуемого устанавливаются физиологические датчики с подключением их к коммутационной колодке 32 подвижной платформы. После указанной подготовки экспериментатор устанавливает на пульте управления устройства один из следующих его режнмов работы. Режимы работы устройства в состоянии неустойчивой опоры приведены в таблице. До, во время и после работы устройства в любом из вышеописанных режимов производится регистравдя технических и медицинских, пдраметров функционирования полусферы и человека на регистрирующей аппаратуре. Работа устройства в режиме 1 происходит при активном балансировании испытуемого ни неустойчивой опоре в условиях 3-х степеней сйободы. Для перевода полусферы с испытуемым в условия неустойчивого равновесия (fi также при режимах 1 и 5) тумблер на пульте управления ставится в положение Неустойчивая опора. При этом включаются обе пары фектродвигателей 19 для управления параметра Ми движения подвижной платформы с одновреМенным сбросом тросов и автоматическим отключением двигателей. Полусфера освобождается от равномерного и симметричного натяжения тросов и переходит из устойчивого состояния В неустойчивое. В режиме 1 испытуемый, зафиксированный в положении стоя только в одной точке (стопы ног), а в положении сидя и лежа только В области таза, производит активное балансирование для сохранения статического или динш ического равновесия и вертикального положения тела. В процессе балансировки колебательные движения различной амплитуды в вертикальных плоскостях сочетаются с 1гаерционными поворотами полусферы вокруг ее оси симметрии при любых положениях подвижной платформы с находящимся на ней человеком по отношению к горизонтальной плоскости. Чем выше ОЦТ устройства от точки опоры полусферы, тем труднее задача сохранения равновесия в вертикальном положении в любой позе. Различная степень неустойчивого равновесия устройства используется для оценки состояния и диналшки изменення функции равновесия испытуемых в процессе их тренировки с помощ
дашюго устройства. Большой угол наклона полусферы (50-60) при активном балансировании в условиях свободной позы имитирует ощущение отсутствия опоры, проваливания в пустоту, т.е. создает модель безопорного пространства, особенно с закрытыми глазами.
После окончания исследований полусфе)ра переводится в устойчивое положение с помощью включения всех четырех электродвигателей 19, управляющих параметрами движения подвижной платформы. Одновременная, синхронная работа двигателей создает равномерное и симметричное натяжение Тросов 4 до величины, обеспечи)зающей плавное или резкое торможение с быстрой или медленной остановкой колебательных движений полусферы и перевод ее в устойчивое положение.
телей 19. При этом одна пара двигателей работает аналогично режиму 2 и 3 на удержание свободного симметричного равномерного натяжения тросов, а другая пара двигателей работает синхронно, чередуясь на натяжение и отдачу троса, создавая условия принудительного наклона полусферы в заданной плоскости с определенной амплитудой и частотой принудительных маятникообразных колебаний неопределенно длительное время при пассивном (обездвиженном) состоянии испытуемого.
Для обеспечения принудительных колебаний полусферы с человеком в различных плоскостях (многоплоскостные налконы) ,работа обеих пар двигателей меняется, т.е. чередуется через различ-, ные промежутки времени при однобременных принудительных поворотах полусферы вокруг вертикальной оси на различный угол в любом Работа устройства в режиме 2 происходит так же при активном балансировании испытуемого на неустойчивой опоре, но в условиях только одной плоскости (в сагитальной или фронтальной). Плоскость балансирования (вправо-влево или вперед-назад) зависит от того, какая пара электродвигателей 19 отключена и какая пара обеспечивает равномерное натяжение тросов для поддержания соответствующего направления наклонов полусферы при балансировании испытуемого. Работа устройства в расширенном режиме 2, т.е. при активном балансировании в любой другой плоскости, может быть достигнута путем поворота устройства с испытуемым вокруг вертикальной оси на любой угол и фиксировании в новом положении. В Этом случае одноштоскостное активное балансирование испытуемого происходит при положении его тела под любым углом к плоскости наклонов. Работа устройства в режиме 3 происходит при пассивном (обездвиженном) состоянии испытуемого.. Свободные колебания полусферы по затухающей синусоиде (амплитуде) достигаются путем включения одной пары электродвигателей 19 для обеспечения свободного равномерного натяжения тросов и, следовательно, соответствующей плоскости качания (аналогично режиму 2). Другая пара электродвигателей включается для обеспечения начального принудительного наклона полусферы с испытуемым в требуемую сторону на заданную амплитуду наклона, затем эта пара двигателей автоматически отключается с отдачей троса, чтобы не препятствовать естественным колебаниям полусферы. Работа устройства в режиме 4. Создание одноплоскостных принудительных колебаний полусферы по незатухающей синусоиде любой амплитуде при пассивном состояннии испытуемого обеспечивается работой всех 4-х электродвиганаправлении с помощью привода 14 электромеханизма вращения подвижной платформы.
Работа устройства в режиме 5 состоит из двух видов движений: первичного - принудительного вращения полусферы с испытуемым в горизонтальной плоскости вокруг оси симметрии и вторичного - последующего перевода полусферы на неустойчивую опору с работой в любом из выщеописанных режимов активного балансирования или свободного и принудительного колебания. Перед включением привода 14 злектромеханизма вращения подвижной платформы, полусфера, переводится в устойчивое положение. После установки на пульте управления программы вращения подвижной платформы включается режим вращения полусферы, которая вращается совместно с диском 3 сферической формы, закрепленного на валу привода 14 электромеханизма вращения подвижной платформы. Перед тем как перейти на режим неустойчивой опоры (в том числе на режим принудительных колебаний) вращение полусферы прекращается и после полной остановки включается режим неустойчивой опоры.
Последующая остановка ее после окончания исследований и перевод в устойчивое состояние производится таким же способом, как описано в режиме 1.
Указанные 5 основных режимов работы устройства могут комбинироваться и происходить в различных вариантах условий работы устройства.
Предлагаемое устройство обеспечивает высокую точность исследования функции равновесия.
Формула изобретения
Устройство для исследования функции равновесия и биомеханики движений человека, содержащее подвижную платформу, стабиллограф, систему фиксации человека, привод, механизм изменения устойчивости, регистрирующую аппаратуру и механизм передачи информации, отличающееся тем, что, с целью повыщения точночти исследования функции равновесия, биомеханики движений человека, механизм изменения устойчивости выполнен в форме полусферы с вертикальной осью и вращающегося диска, соединенных гибкими тросами, причем внутри полусферы на вертикальной оси размещен груз, а стабиллограф установлен на вертикальной оси с возможностью продольного перемещения.
Источники информации, принятые во внимание при зкспертизе
1. Авторское свидетельство СССР № 227495, кл. А 61 В 5/16, 07.08.65.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИССЛЕДОВАНИЯ УСТОЙЧИВОСТИ ТЕЛА ЧЕЛОВЕКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2325847C2 |
| КРЕСЛО ДЛЯ ИССЛЕДОВАНИЯ ВЕСТИБУЛЯРНОГО АППАРАТА | 1966 |
|
SU181769A1 |
| ПЛАТФОРМА ДЛЯ ИССЛЕДОВАНИЯ ОПОРНЫХ РЕАКЦИЙ | 2004 |
|
RU2270603C1 |
| Стабилограф | 1979 |
|
SU825000A1 |
| Способ оценки качества удержания вертикального положения | 2023 |
|
RU2833267C1 |
| СПОСОБ ИНТЕГРАЛЬНОЙ ОЦЕНКИ СОСТОЯНИЯ ОРГАНИЗМА ЧЕЛОВЕКА | 2010 |
|
RU2429786C1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ ЦЕНТРАЛЬНОЙ НЕРВНОЙ СИСТЕМЫ | 1992 |
|
RU2076632C1 |
| Роботизированное кресло-тренажер | 2024 |
|
RU2837297C1 |
| СПОСОБ ФОРМИРОВАНИЯ УСТОЙЧИВОСТИ ВЕРТИКАЛЬНОЙ ПОЗЫ У ПАЦИЕНТОВ СО СТАТОДИНАМИЧЕСКИМИ НАРУШЕНИЯМИ | 2010 |
|
RU2448645C1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ПРОСТРАНСТВЕННОЙ ДЕЗОРИЕНТАЦИИ У ЧЕЛОВЕКА | 2010 |
|
RU2425667C1 |