Изобретение относится к тренажерам для реабилитации людей с неврологическими нарушениями, а именно к тренажерам для восстановления двигательной функции мышц туловища человека.
Для вертикализации и ходьбы людей, страдающих ДЦП или перенесших травмы спинного мозга, инсульт или т.п., требуется согласованное включение в работу всех звеньев кинематических цепей организма, в которых задействованы кости, суставы, мышцы, сухожилия, нервы, фасции и прочие соединительные ткани. В стандартных протоколах реабилитации предусмотрены этапы восстановления работы фазической мускулатуры, отвечающей за совершение сознательных, подконтрольных движений, однако, этап восстановления позно-тонической мускулатуры, отвечающей за удержание положения тела, практически отсутствует, так как является крайне трудоемким в реализации. Специалисты по реабилитации идут по пути ранней вертикализации и стимуляции ходьбы, не учитывая положения уровневой теории организации движений Н.А. Бернштейна, согласно которой в организации сложных движений участвуют, как правило, несколько уровней (классов) движения. Если регуляция позно-тонической мускулатуры и способность самостоятельно поддерживать или изменять положение тела человека не восстановлены, то весь сегмент туловища, который содержит общий центр масс тела, выпадает из кинематической цепи, фактически разрушая нормальную биомеханику ходьбы. В большинстве случаев рефлекторные реакции равновесия у людей с ограниченными возможностями здоровья частично сохранны, однако, их возможности в силовом выражении функционально недостаточны для самостоятельного поддержания вертикального положения туловища или его произвольного изменения.
Известно ортопедическое сиденье-тренажер Толстунова (см., например, https://arqo-tema.ru/sidene-tolstunova-obschava-informatsiya.html), устанавливаемое на любой стул. Имея единственную точку опоры, тренажер вызывает состояние неустойчивого равновесия, включая тем самым вестибулярный аппарат, который рефлекторно активирует глубоко расположенные позвоночные мышцы. Недостатком тренажера является то, что он дает избыточную хаотическую стимуляцию мышечных сокращений, что приводит к еще большей дестабилизации при мышечной дистонии и нарушениях функции мышц туловища. Пользоваться указанным тренажером не смогут лица с поражениями опорно-двигательного аппарата, использующие инвалидную коляску, лица с ДЦП при выраженных атаксиях и дистониях, лица с радикулярным синдромом и подвывихами тел позвонков, нестабильностью суставов, последствиями инсульта, лица пожилого возраста. Также при использовании сиденья-тренажера у пользователя существует риск получения травмы вследствие слишком резкой смены положения туловища, падения с тренажера или травмы при слабости позно-тонической мускулатуры. Кроме того, при использовании тренажера Толстунова пользователю требуется дополнительная страховка при выполнении упражнений.
Известен тренажер Huber 360 компании LPG (см. https://www.Ipgmedical.com/en/professional-area/huber/), представляющий из себя моторизированную платформу для координационных тренировок, укомплектованную датчиками, позволяющими проводить тренировки, как на подвижной, так и на неподвижной платформе, независимо от этого получая все данные биологической обратной связи. Программное обеспечение тренажера непосредственно в процессе тренировки анализирует и отображает положение центра масс, что позволяет пользователю корректировать свои действия и положение на платформе. Тренажер предполагает использование в положении «стоя», дополнительно в него можно установить сиденье для выполнения упражнений в положении «сидя». К недостаткам указанного тренажера относится то, что его сиденье не обеспечивает точную посадку (позиционирование) пользователя - человек может «сползать», что смещает фокус воздействия с одних мышечных групп на другие. У тренажера только 2 степени свободы, это ограничивает возможности движения платформы для воздействия на скелетно-мышечную систему пользователя. Также тренажер практически не подходит для тех, кто плохо сидит самостоятельно, так как требует высокого уровня сохранности произвольных движений таза и туловища. Кроме того, частота опроса тензометрических датчиков низкая (40 Гц), что снижает эффективность контроля выполнения движения.
Известно модульное ортопедическое кресло-тренажер: (см. патент RU №2423961, опубл. 20.07.2011), содержащее управляющую ЭВМ и состоящее из шарнирно-соединенных модулей - ложементов для соответствующего сегмента сустава человека, соединяемого с этим сегментом с помощью мягких ортезов.
Ложементы-модули между собой соединены шарнирно так, что один из пары соединенных модулей является основанием привода, а второй через тензометрический датчик усилия соединен с выходным валом этого привода. Основанием тренажера является спинка кресла. С ней жестко соединен корпус роликовинтового линейного электропривода. Выходной вал этого привода через тензодатчик соединен с коленным ложементом в области его сочленения с голеностопным ложементом. Со спинкой кресла также соединен ложемент плечевого сегмента, который является основанием электропривода вращения. Выходной вал последнего через угловую тягу и вилку соединен с механическим диполем, установленным в две полушаровые опоры, соединенные жестко с плечевым ложементом. Механический диполь при этом через тензометрированную упругую балку соединен с ложементом локтевым. Перечисленные механизмы в кресле-тренажере выполнены левыми и правыми, управляемыми раздельно от контроллеров, информационные входы которых соединены с единым процессором и вторыми входами с выходами датчиков усилий, возникающих при задании «пробных движений» ложементам. Сигналы с датчиков несут информацию о мышечной реакции на «пробное движение». К недостаткам тренажера относится то, что остается не ясным, как он будет адаптировать к контрактуре и спастике у людей со спинальной травмой и ДЦП, так как их невозможно пассивно обучить правильным движениям. Попытка преодолеть силой спастику и контрактуру или недостаточно тонкая настройка усилия на тренажере может привести к травмам у занимающегося. Кроме того, сегмент туловища иммобилизован, то есть устройство работает только с конечностями, но не работает с туловищем. Биомеханически мышцы туловища являются хабом для передачи усилия между верхними и нижними конечностями, без восстановления функции мышц туловища тренировка конечностей имеет низкую прикладную способность. Движения в конечностях не дают возможности совершать целостные двигательные акты, которые нужны человеку в повседневной жизни.
Известно тренировочное устройство (патент CN №201930463, опубл. 17.08.2011), являющееся вертикализатором с функцией ассистивной помощи на основе датчиков давления в опорных поверхностях. Соответствует методу восстановления двигательных функций с частичной компенсацией силы тяжести - создает облегченные условия выполнения движения. Однако ассистивная поддержка осуществлена только в одной сагиттальной плоскости (движения вперед-назад). Движения же во фронтальной плоскости (вправо-влево) не поддерживаются. Это значительно ограничивает прикладную способность занятий на устройстве для восстановления навыков самообслуживания. Кроме того, кинематика устройства с одной степенью свободы даже при наличии датчиков давления не позволяет учитывать и корректировать индивидуальные биомеханические компенсации (например, пациент со спастической гемиплегией (паралич руки и ноги с одной стороны) будет подниматься из положения лежа в положение «сидя», используя преимущественно сохранную сторону). То есть необходим внешний контроль со стороны специалиста, чтобы восстанавливать двигательную функцию и избегать однобокого восстановления. Из описания устройства остается недостаточно ясным, как аппарат подстраивается под антропометрические особенности конкретного человека: например, можно ли регулировать длину секции для ног или туловища, чтобы задавать правильные точки приложения ассистивной помощи для восстановления произвольных движений.
Наиболее близким к заявляемому техническому решению является тренировочное устройство (патент CN №208927520, опубл. 04.06.2019), включающее пьедестал, колонну, сиденье, L-образную опору, спинку, подлокотники, датчик угла наклона. Нижний конец колонны жестко соединен с пьедесталом. Сторона колонны жестко соединена с L-образной опорой. Спинка и подлокотники установлены в L-образную опору. Верхняя часть колонны соединена с сиденьем с помощью кулачкового механизма, который включает в себя фланец сиденья, а также фланцевую заглушку, ограничительную пластину, фланец колонны, подшипник шарнирного соединения с прямым стержнем. Таким образом, пьедестал устройства подпружинен, и пользователь самостоятельно наклоняет его, перенося вес тела в соответствии с заданием системы. Недостатком устройства является то, что оно не подходит людям с выраженными двигательными ограничениями, так как они для наклона сиденья будут использовать смещение плечевого пояса и головы - произвольное движение, а уже затем пассивно будет наклоняться таз. Остается не ясным вопрос центровки положения пользователя. Так как ось крепления сиденья зафиксирована, а при пересадке человека с коляски можно «промахнуться», тогда ось наклона не будет соответствовать оси тела, что приводит к неправильной биомеханике выполнения. Кроме того, не ясен вопрос существующей вибрации, из описания устройства не понятно, насколько жесткие пружины и есть ли вибрация при движении. С учетом характерной для людей с поражениями спинного мозга вторичной почечно-печеночной патологии вибрация может быть нежелательна. Также это касается высокого риска тромбообразования у данной категории пользователей.
Задачей заявляемого технического решения является разработка тренировочного устройства для реабилитации людей с неврологическими нарушениями с возможностью точно дозированного изменения положения таза пользователя в положении «сидя».
Технический результат изобретения заключается в повышении эффективности реабилитационного процесса людей с неврологическими нарушениями за счет восстановления произвольных движений туловища.
Технический результат достигается тем, что роботизированное кресло-тренажер состоит из спинки и платформы сиденья, блока управления и блока питания. Спинка состоит из штанги, выполненной с возможностью наклона, и сегментов спинки, расположенных попарно вдоль штанги. Каждый сегмент спинки выполнен с возможностью регулировки по высоте и по глубине вылета в сагиттальной плоскости. Штанга спинки зафиксирована перпендикулярно к платформе сиденья, при этом платформа сиденья состоит из подушки сиденья, гексапода, подключенного по каналу связи к блоку управления, и ножек. Под подушкой сиденья установлены по меньшей мере три тензометрических датчика, подключенные по каналу связи к блоку управления, а блок управления содержит предустановленное программное обеспечение с возможностью расчета скорости и амплитуды движения гексапода на основе данных тензометрических датчиков.
Подушка сиденья может быть оснащена датчиками давления и датчиками температуры, подключенными по каналу связи к блоку управления.
Тензометрические датчики могут быть выполнены с частотой опросов от 20 до 320 Гц.
Сегмент спинки может содержать линейный актуатор и датчик давления, подключенные по каналу связи к блоку управления.
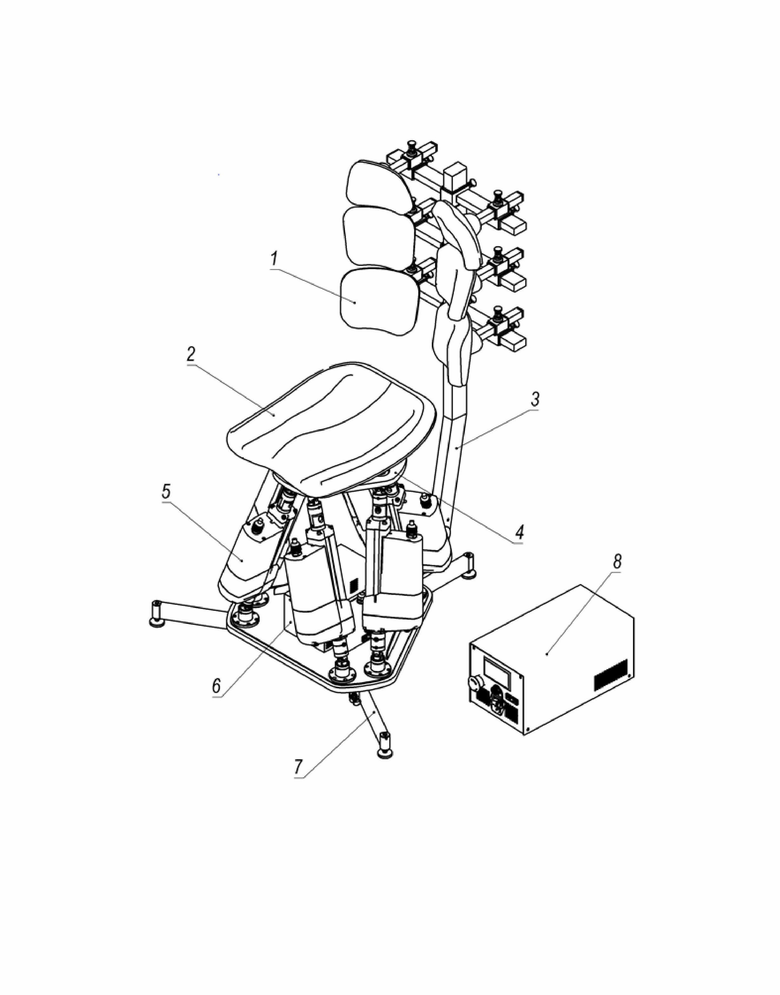
Заявляемое изобретение поясняется чертежом, на котором изображено схематическое устройство кресла-тренажера.
Цифрами обозначено следующее:
1 - сегменты спинки,
2 - подушка сиденья,
3 - регулируемая спинка,
4 - основание подушки сиденья,
5 - гексапод,
6 - блок управления,
7 - складные ножки,
8 - блок питания.
Роботизированное кресло-тренажер состоит из двух подвижных и независимых частей: платформы сиденья и спинки.
Спинка 3 состоит из штанги, которая крепится к платформе сиденья, а именно к основанию гексапода 5, и имеет регулировку угла наклона, и сегментов спинки сиденья 1. В качестве инструмента регулировки наклона спинки 3 в месте соединения штанги с основанием гексапода 5 установлена крепежная перфорированная косынка с отверстиями, соответствующими разным углам наклона спинки 3, в которые можно вставить фиксатор. Сегменты спинки 1 расположены попарно вдоль штанги и в каждой паре соединены планкой и закреплены к штанге с возможностью регулировки высоты расположения. Спинка 3 включает три пары сегментов 1 - поясничные, грудные, лопаточные. Каждый сегмент спинки 1 выполнен с возможностью регулировки по глубине вылета в сагиттальной плоскости, например, механически с помощью выдвижения нужных сегментов и их фиксации. Обеспечение возможности регулирования сегментов спинки 1 по высоте и вылету в сагиттальной плоскости расширяет возможности адресного воздействия на глубокую мускулатуру туловища пользователя. В перспективе спинка 3 может быть также роботизирована и синхронизирована с платформой сиденья. Например, в сегменты спинки 1 могут быть добавлены линейные актуаторы и датчики давления, подключенные по каналу связи блоком управления 6. Таким образом, кресло-тренажер будет обладать не одной (сиденье), а двумя автоматизированными опорными поверхностями (сиденье и спинка) для лучшего управления изменениями позы пользователя. Например, по мере восстановления функции мышц спины высота поддержки будет снижаться (только на уровне поясницы вместо поясницы - грудного отдела - лопатки).
Платформа сиденья состоит из верхней части - подушки сиденья 2, контактирующей непосредственно с телом пользователя, основанием подушки сиденья 4, гексапода 5, блока управления 6 креслом-тренажером, складных ножек 7 и блока питания 8. Подушка сиденья 2 профилирована и имеет наплыв по середине для придания ей анатомической формы таза человека в целях лучшей центровки положения тела пользователя на ней. Основание подушки сиденья 4 оборудовано по меньшей мере тремя тензометрическими датчиками с частотой опроса от 20 до 320 Гц, подключенными по каналу связи к блоку управления 6. Подушка сиденья 2 может быть дополнительно оснащена равномерно распределенными датчиками давления (по типу pressure map) и температуры, подключенными по каналу связи к блоку управления 6. Для наилучшего обеспечения связи платформы сиденья с блоком управления 6 кресло-тренажер должно содержать по меньшей мере 36 датчиков каждого типа. Гексапод 5 обеспечивает точное позиционирование таза сидящего человека за счет изменения положения подушки сиденья 2 в пространстве. Классическая конструкция гексапода (платформы Гью-Стюарта) имеет шесть степеней свободы, что обеспечивает высокую прецизионность и плавность движения всей платформы сиденья, которая недоступна наиболее близким по принципу воздействия конкурирующим решениям, построенным по другой кинематической схеме. Конструкция гексапода 5 известна и включает в себя шесть прецизионных линейных приводов, приводимых в движение блоком управления гексаподом 5, в качестве которого использован блок управления 6. На основании гексапода 5 расположен блок управления 6 креслом-тренажером, представляющий из себя компьютер с предустановленным программным обеспечением, выполненный с возможностью анализа показателей всех указанных датчиков и приведения в движение автоматизированных элементов кресла. Складные ножки 7 выполнены с возможностью разворота для увеличения площади опоры и большей устойчивости. Блок питания 8 сопряжен по каналу связи с блоком управления 6 кресла-тренажера и может быть как размещен отдельно от него, так и быть встроен в конструкцию платформы сиденья.
Выполнение тренажера в виде кресла обусловлено тем, что общий центр масс тела человека расположен именно в туловище, таким образом, через воздействие непосредственно на самый «тяжелый» сегмент тела человека и сокращение количества звеньев в кинематической цепи, облегчается общий контроль движений за счет уменьшения количества избыточных степеней свободы. Положение «сидя» является относительно устойчивым, что повышает доступность занятий для людей с выраженными двигательными ограничениями. Кроме того, люди с ограниченными возможностями здоровья находятся в положении «сидя» большую часть дня (как и большинство условно здоровых людей), поэтому коррекционное воздействие легко интегрировать в такой сценарий, не вмешиваясь в другие виды повседневной активности. Положение таза определяет положение позвоночника, головы, а также общую ориентацию в пространстве, что особенно важно при нарушениях координации и ориентации в окружающем пространстве у людей с поражениями нервной системы, а также пожилых людей. Точки пересечения самого большого числа кинематических цепей в теле человека расположены именно в области таза, поэтому воздействие на положение таза вызывает наибольшие сдвиги в общей биомеханике всего тела человека.
Роботизированное кресло-тренажер работает следующим образом. Пользователя с неврологическими нарушениями усаживают на подушку сиденья 2, включают кресло-тренажер, подавая питание от блока питания 8, и осуществляют регулировку по высоте складных ножек 7, сегментов спинки 1 по высоте, а также их вылета в сагиттальной плоскости в соответствии с изгибом позвоночника пользователя. Затем запускают на блоке управления 6 программу тестирования (длительностью около 1 минуты), которая подает сигналы на линейные приводы гексапода 5, наклоняя платформу сиденья в разных направлениях относительно вертикальной оси туловища пользователя. При этом у человека возникают реакции равновесия (старается сохранить вертикальное положение туловища). Одновременно тензометрические датчики регистрируют характер перемещения общего центра масс тела в ответ на изменения положения сиденья, и передают соответствующие сигналы в блок управления 6. Таким образом, полученные с тензометрических датчиков данные позволяют понять, насколько пользователь управляет своим туловищем. Эти сигналы программное обеспечение блока управления 6 интерпретирует как информацию, насколько пользователь сам может вернуть свой общий центр масс в исходное нейтральное положение при изменении наклона опорной поверхности, а также рассчитывает скорость, с которой пользователь может вернуться в исходное положение, и направления, в которых он делает это «лучше/хуже», после чего на основе этих данных формирует профиль пользователя (или уточняет его, если пользователь повторно использует тренажер) и строит индивидуальную программу восстановления двигательной функции.
Далее после входного тестирования на основе его результатов запускается программа восстановления двигательной функции. Тензометрические датчики фиксируют изменение положения общего центра масс и посылают соответствующие сигналы на блок управления 6, отражающие перемещение проекции общего центра масс тела на поверхность сиденья при изменении его положения в процессе работы гексапода, где программное обеспечение строит траектории перемещения общего центра масс пользователя и сравнивает их с траекториями условно здоровых людей. На основе полученных данных с тензометрических датчиков блок управления 6 подает сигнал на гексапод 5, корректируя траекторию движений гексапода 5 (скорость и амплитуду его движения) в соответствии с индивидуальными двигательными особенностями пользователя так, чтобы добиться улучшения траектории движения общего центра масс пользователя. Динамическое изменение положения таза у пользователя кресла-тренажера меняет также позицию грудной клетки и активирует присасывающий эффект диафрагмы, облегчающий общий венозный возврат крови к сердцу, тем самым снижая риск сердечно-сосудистых заболеваний. Это происходит значительно эффективнее, чем при использовании эргономичной мебели, придающей телу правильное, но статическое положение.
Одновременно датчики температуры (при их наличии) непрерывно фиксируют уровень кровообращения в нижних конечностях пользователя и передают соответствующий сигнал в программное обеспечение блока управления 6. У людей с неврологической патологией часто мерзнут конечности. В процессе тренировочной сессии активируется туловище и тазовый пояс, тем самым активируя кровообращение в нижних конечностях. На основе данных с температурных датчиков программное обеспечение блока управления 6 строит температурную карту задней поверхности бедра и ягодиц пользователя и анализирует характер сосудистого тонуса в сегментах тела, соприкасающихся с поверхностью сиденья. Это позволяет судить о качестве циркуляции биологических жидкостей в текущий момент времени и оперативно корректировать алгоритмы движения всего роботизированного кресла. Датчики давления (при наличии) непрерывно фиксируют распределение давления по поверхности платформы сиденья в моменте, что позволяет определить позу пользователя на кресле-тренажере. Соответствующие сигналы датчики давления посылают в блок управления 6. На основе полученных данных датчиков температуры и датчиков давления (при их наличии) программное обеспечение производит сравнение показателей с нормальными и идентифицирует способ поддержки равновесия пользователя, что позволяет нормализовать кровообращение в области таза и нижних конечностей.
Таким образом, предлагаемое изобретение позволяет от сессии к сессии восстанавливать нормальную работу позно-тонической мускулатуры пользователя и значительно улучшить процесс его реабилитации.
Заявляемое изобретение обладает следующими преимуществами:
- отсутствие противопоказаний к применению, так как кресло-тренажер не оказывает массажного или физиотерапевтического воздействия и подходит всем категориям пользователей;
- наличие возможности оперативно корректировать алгоритмы движения всего роботизированного кресла-тренажера;
- активная подвижность кресла-тренажера компенсирует негативные изменения кровотока в области малого таза и нижних конечностей на фоне длительного сидения, нормализует микроциркуляцию в тканях тела и создает предпосылки для улучшения репродуктивной функции пользователя;
- регулярное использование кресла-тренажера облегчает общий венозный возврат крови к сердцу пользователя, тем самым снижая риск сердечно-сосудистых заболеваний;
- возможность проводить раннее обнаружение признаков нейродегенеративных заболеваний по меняющемуся характеру управления двигательной функцией со стороны центральной нервной системы;
- возможность воссоздания кинематики классического маятника с разной длиной оси, что позволяет локализовать воздействие на определенные зоны глубокой мускулатуры туловища и точно дозировать их, чтобы повысить эффективность реабилитационных процедур;
- возможность улучшения качества питания тканей головного мозга за счет автоматического изменения положения платформы сиденья в вертикальной плоскости, что позволяет менять положение головы пользователя и, в частности, шейного отдела позвоночника и тонус его мускулатуры, влияя на кровоток в шейных артериях;
- возможность задействовать большинство мышечных волокон, которые подвержены атрофии бездействия во время длительного сидения на классических эргономических креслах или в инвалидной коляске;
- улучшение общей биомеханики тела пользователя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ УСТОЙЧИВОСТИ В ПОЗЕ СИДЯ У ПАЦИЕНТОВ СО СТАТОДИНАМИЧЕСКИМИ НАРУШЕНИЯМИ | 2010 |
|
RU2448670C1 |
| Мобильный тренажерный комплекс социально-медицинской адаптации | 2023 |
|
RU2817922C1 |
| Способ разгрузки позвоночного столба и устройство для его осуществления | 2016 |
|
RU2661585C2 |
| Тренажер для реабилитации и укрепления рук и туловища МНОГОФУНКЦИОНАЛЬНЫЙ и способ его применения | 2023 |
|
RU2803379C1 |
| УСТРОЙСТВО ДЛЯ ПОЗИЦИОНИРОВАНИЯ ТЕЛА ПОЛЬЗОВАТЕЛЯ И СПОСОБ УПРАВЛЕНИЯ ДАННЫМ УСТРОЙСТВОМ | 2020 |
|
RU2808811C2 |
| МОДУЛЬНОЕ ОРТОПЕДИЧЕСКОЕ КРЕСЛО-ТРЕНАЖЕР | 2009 |
|
RU2423961C2 |
| Тренажер для реабилитации верхних конечностей и туловища РУЛЕВОЙ и способ его применения | 2023 |
|
RU2798356C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ МОБИЛЬНОСТИ ПАЦИЕНТОВ С ТЕТРАПАРЕЗОМ | 2022 |
|
RU2783306C1 |
| ДИНАМИЧЕСКИЙ ТРЕНАЖЁР ДЛЯ ПОЗВОНОЧНИКА | 2022 |
|
RU2792398C1 |
| СИЛОВОЙ ТРЕНАЖЁР | 2016 |
|
RU2620488C1 |
Изобретение относится к медицинской технике, а именно к роботизированному креслу-тренажеру. Изобретение состоит из спинки и платформы сиденья, блока управления и блока питания. Спинка состоит из штанги, выполненной с возможностью наклона, и сегментов спинки, расположенных попарно вдоль штанги и включающих три пары сегментов: поясничные, грудные, лопаточные. Каждый сегмент спинки выполнен с возможностью регулировки по высоте и по глубине вылета в сагиттальной плоскости. Штанга спинки зафиксирована перпендикулярно к платформе сиденья. Платформа сиденья состоит из подушки сиденья, гексапода, подключенного по каналу связи к блоку управления, и складных ножек. Под подушкой сиденья установлены тензометрические датчики, подключенные по каналу связи к блоку управления. Блок управления содержит предустановленное программное обеспечение с возможностью расчета скорости и амплитуды движения гексапода на основе данных тензометрических датчиков. Регулировка наклона спинки выполнена посредством крепежной перфорированной косынки с отверстиями, установленной в месте соединения штанги с основанием гексапода. Технический результат изобретения заключается в повышении эффективности реабилитационного процесса людей с неврологическими нарушениями за счет восстановления произвольных движений туловища. 2 з.п. ф-лы, 1 ил.
1. Роботизированное кресло-тренажер, состоящее из спинки и платформы сиденья, блока управления и блока питания, отличающееся тем, что спинка состоит из штанги, выполненной с возможностью наклона, и сегментов спинки, расположенных попарно вдоль штанги и включающих три пары сегментов: поясничные, грудные, лопаточные, причем каждый сегмент спинки выполнен с возможностью регулировки по высоте и по глубине вылета в сагиттальной плоскости, штанга спинки зафиксирована перпендикулярно к платформе сиденья, при этом платформа сиденья состоит из подушки сиденья, гексапода, подключенного по каналу связи к блоку управления, и складных ножек, причем под подушкой сиденья установлены по меньшей мере три тензометрических датчика, подключенные по каналу связи к блоку управления, а блок управления содержит предустановленное программное обеспечение с возможностью расчета скорости и амплитуды движения гексапода на основе данных тензометрических датчиков, при этом регулировка наклона спинки выполнена посредством крепежной перфорированной косынки с отверстиями, установленной в месте соединения штанги с основанием гексапода.
2. Роботизированное кресло-тренажер по п. 1, отличающееся тем, что подушка сиденья оснащена датчиками давления и датчиками температуры, подключенными по каналу связи к блоку управления.
3. Роботизированное кресло-тренажер по п. 1, отличающееся тем, что сегмент спинки содержит линейный актуатор и датчик давления, подключенные по каналу связи к блоку управления.
| WO 2023236674 A1, 14.12.2023 | |||
| US 8915871 B2, 23.12.2014 | |||
| CN 114081794 A, 25.02.2022 | |||
| Устройство для подачи заготовок из магазина в патрон шпинделя токарного, шлифовального и т.п. станков | 1956 |
|
SU114614A2 |
| US 9573019 B2, 21.02.2017 | |||
| US 11590045 B2, 28.02.2023 | |||
| US 20230285824 A1, 14.09.2023 | |||
| US 7252644 B2, 07.08.2007. | |||

