1
Изобретение относится к области программного управления бумагорезальными машинами, а именно к способам программного управления прямыми и обратными ходами одноножевой бумагорезальной ManjHHbi с применением магнитного носителя.
Известен способ программного управления бумагорезалыой машиной, состоящий в том, что записывают на магнитный носитель одновременно метки, соответствующие резам бумаги при прямом ходе подавателя машины и останову при его реверсе, устанавливают магнитные головки на заданной до15ожке магнитного носителя и перемещают их относите,,1ьно магнитного носителя синхронно с подавателем машины, сигналы с магнитных головок усиливают, формируют и подают на исполнительный механизм, соединенный с юдавателем машины, метки обратного хода подавателя машины всех программ записывают на одну дорожку магнитного носителя, а магнитную головку, считывающую эти метки, при рабочем ходе подавателя мащины отключают, а при реверсе сравнивг.ют сигналы с магнитных головок прямого и обратного хода
и при их совпадении подают команду на оста1юв подавателя MaiitnHbi.
Для реализации этого способа используется устройство. содержан,ее магнитный носитель, магнитные головки прямого и обратного хода, механизм перемещения магнитных головок, усилители, формирователи сигналов и исполнительный механизм 1.
В известном способе не обеспечено программирование останова подавателя (рабочего органа) в переднем положении после осуществления последнего реза в случаях, когда не требуется пос,тедуюи.ее перемепгение стоны вперед. Это ограничивает технологические возможности машины, так как подаватель в соответствии с известным снособом программирования обеспечивает перемещение стоны всегда до крайнего переднего положения стола, что в значительной мере ограничивает производительность работы машины.
Пелью настоящего изобретения является повьпнение производительности работы машины путем программирования останова подавателя по последнему резу в переднем положении стопы без ее последуюп1его переметения до кр)айнего переднего положения стола.
Вышеуказанная цель достигается за счет того, что на одну дорожку магнитного носителя дополнительно записывают ограничительные метки прямого хода подавателя для всех программ реза, определяют последовательность команд от магнитных головок рабочего хода в зависимости от направления движения подавателя, а управление остановом подавателя машины дополнительно производят при совпадении меток прямого хода и ограничительных меток обратного хода.
В устройстве для осушествления этого способа, содержашем магнитный носитель, .магнитные головки прямого и обратного хода и считывающую головку, основание магнитных головок, механизм перемещения магнитных головок, усилители, формирователи сигналов прямого и обратного ходов подавателя .машины и исполнительный механизм машины, логический блок И и ключи, имеется блок определения последовательности команд магнитных головок рабочего хода, причем магнитные головки прямого и обратного хода и считывающая головка соединены с соответствующими формирователями через усилители, выход формирователя сигналов обратного хода соединен с одним из входов логического блока И, другой вход которого соединен с формирователем сигналов прямого хода и с одним из входов блока определения последовательности команд, а выход - с входом соответствующего ключа и другим входом блока определения команд, а выход ключа соединен с исполнительным механизмом, выход которого соединен с формирователем сигнала прямого хода, при этом формирователь сигнала считывающей головки соединен с третьим входом блока определения последовательности команд и через соответствующий ключ - с исполнительным механизмом, а выход блока определения ко.манд связан с соответствующим входом исполнительного механиз.ма.
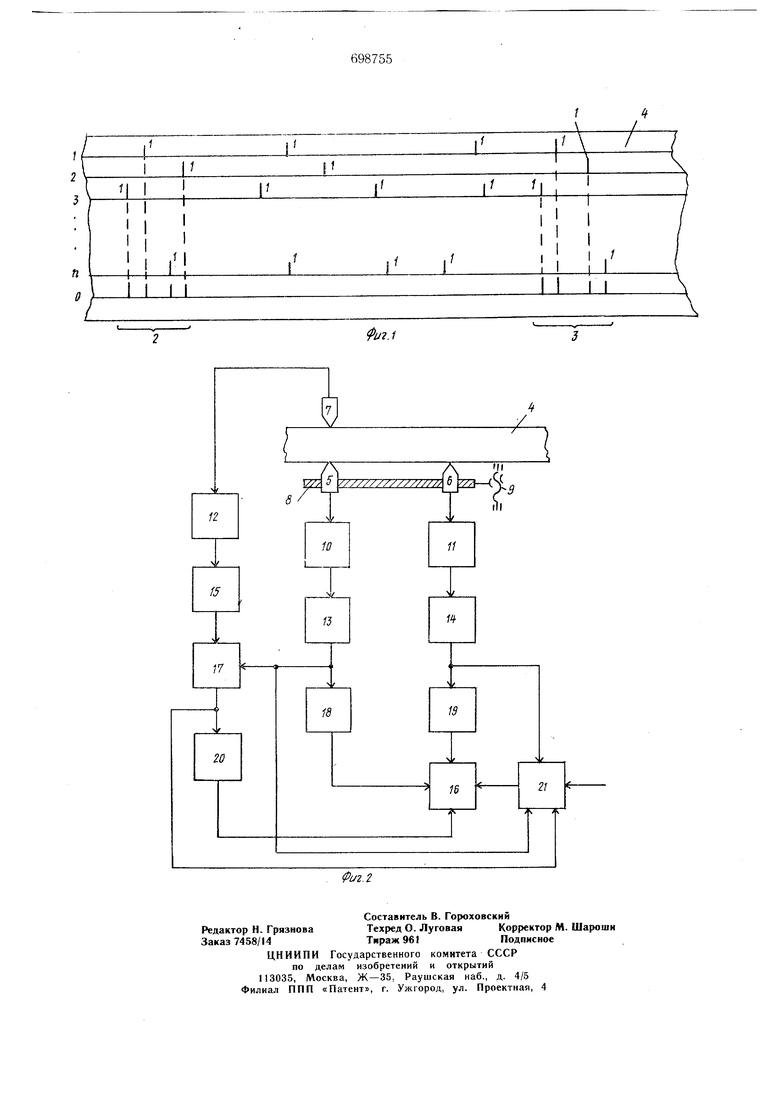
На фиг. 1 изображены метки программных резов и ограничительные метки прямого и обратного ходов; на фиг. 2 - блоксхема устройства, реализующего предлагае.мый способ.
На фиг. 1 позицией 1 обозначены метки рабочих ходов на программных дорожках магнитной ленты, позицией 2 - ограничительные метки прямых ходов, подавателя, позицией 3 - ограничительные метки обратных ходов подавателя.
Устройство для осуществления способа содержит носитель 4, магнитные головки прямого (рабочего) хОлТ,а 5, 6, магнитную головку обратного хода (ограничительную, общее основание 8 магнитных головок, механизм 9 перемещения магнитных головок, усилители 10, 11, 12, формировате 1и 13, 14, 15, исполнительный механизм 16, логический блок И 17, ключи 18, 19, 20, блок 21 определения последовательности команд головок рабочего хода.
Устройство в соответствии с предлагаемым способом программного управления работает следующим образом.
При записи программы метки рабочих ходов (резов) записывают на дорожках «1-п, а ограничительные метки - на дорожке «О. Запись ограничительных меток прямого хода осуществляют одновременно с записью меток последнего реза рабочих дорожек, а запись ограничительных меток обратного хода осуществляют одновременно с записью меток первого реза рабочих дорожек.
Блок 21 определения последовательности команд головок рабочего хода по сигналам датчика, установленного на мащине (на чертеже не показан), определяет, какая из магнитных головок прямого хода 5 или 6 вырабатывает сигнал на снижение скорости подавателя, а какая на останов. При рабочем ходе подавателя сигнал на снижение скорости вырабатывается головкой 5, а на останов - головкой 6. При обратном ходе подавателя сигнал снижения скорости вырабатывается магнитной головкой 6, а сигнал останова - магнитной головкой 5.
Магнитные головки 5 и 6, имеющие общее основание 8, с помощью механизма 9 перемещения вручную или авто.матически устанавливают на заданной дорожке «1 - п магнитного носителя 4. В процессе перемещения подавателя магнитные головки 5, 6, 7 перемещают относительно магнитного носителя 4. В процессе рабочего хода (подаватель движется вперед) магнитные головки 5 и 6 через усилители 10, 11, фор.мирователи 13, 14 и нор.мально замкнутые ключи 18, 19 подключены к исгюлнительному механизму 16. При считывании магнитной метки головкой 5 электрический сигнал через усилитель 10, формирователь 13 и ключ 18 подается на исполнительный механизм 16, что обеспечивает снижение скорости подавателя машины. Когда эта же метка считывается головкой 6, усилителем 11, формирователем 14 и ключом 19, вырабатывается сигнал на исполнительный механизм 16, который осуществляет останов подавателя. Магнитная Головка 7 считывает ограничительные метки и посылает электрические сигналы через усилитель 12 и формирователь 15 на логический блок И. 17. На второй вход логического блока И 17 поступают сигналы с выхода формирователя 13 магнитной головки 5. Если сигналы на входы блока И 17 с выходов формирователей 13 и 15 поступают не одновременно, то сигнал на выходе этого блока не появляется. При совпадении сигналов на магнитных головках 5 и 7 на входы логического блока И 17 с выходов формирователей 13 и 15 одновременно приходят два сигнала и на выходе блока И 17 появляется сигнал, который поступает на вход блока 21 определения последовательности команд головок рабочего хода. С выхода блока 21 сигнал поступает на исполнительный механизм 16 и подготавливает запрет на дальнейшее перемещение подавателя вперед. Очередной сигнал с магнитной головки 6 через усилитель 11, формирователь 14 и ключ 19 осуществляет останов подавателя с запретом на дальнейшее перемещение. С выхода блока И сигнал поступает также на вход ключа 20, выход которого соединен с исполнительным механизмом 16. Однако этот сигнал не воздействует на исполнительный механизм, так как ключ 20 в процессе рабочего хода нормально разомкнут. В процессе обратного хода (подаватель перемеплается назад) ключи 18 и 19 размыкаются, отключая магнитные головки 5 и 6 от исполнительного механизма 16, а ключ 20 замыкается, подключая к исполнительному механизму 16 выход логического блока И 17-. Блок 21 определения последовательности команд головок рабочего хода переключает сигналы головок 5 и 6 на режи.м обратного хода и отключает свой выход от исполнительного механизма 16. Когда сигналы от магнитных головок 5 и 7 через усилители 10 и 12 и формирователи 13 и 15 одновременно поступят на логический блок И 17, с его выхода через ключ 20 на исполнительный механизм 16 подается сигнал и происходит останов под,авателя. Конструктивно блок 21 может быть выполнен в виде электронных ключей, коммутатора, реверсивного счетчика и т.д. Предлагаемый способ управления и устройство, его реализующее, могут быть использованы в любых других аналогичных механизмах, где требуется програ.ммированное перемещение рабочего органа при исполь зовании магнитного носителя. Формула изобретения . Способ программного управления бумагорезальной мащиной состоящий в том, что записывают на магнитный носитель одновременно метки, соответствующие резам бумаги при прямом ходе подавателя .машины, и ограничительные метки нри обратно.м ходе, устанавливают магнитные головки на заданной дорожке магнитного носителя и перемещают их относительно магнитного носителя синхронно с подавателем мащины, метки обратного хода подавателя мащины всех программ записывают на одну дорожку магнитного носителя, а при реверсе сравнивают сигналы с магнитных головок прямого и обратного хода и управ-ляют остановом подавателя мащины при их совпадении, отличающийся тем, что, с целью повышения производительности работы мащины, на одну дорожку магнитного носителя дополнительно записывают ограничительные метки прямого хода подавателя для всех программ реза, определяют последовательность команд от магнитных головок рабочего хода в зависимости от направления движения подавателя, а управление остановом подавателя машины дополнительно производят при совпадении меток прямого хода и ограничительных- меток обратного .хода. 2. Устройство для осуществления способа по п. 1, содержащее магнитный носитель, магнитные головки прямого и обратного хода и считывающую головку, основание магнитных головок, механизм перемещения магнитных головок, усилители, формирователи сигналов прямого и обратного ходов подавателя машины и исполнительный механизм подавателя мащины, логический б.юк И и ключи, отличающееся тем, что оно имеет блок определения последовательности команд магнитных головок рабочего хода, причем магнитные головки прямого и обратного ход,а и считывающая головка соединены с соответствующими формирователями через усилители, выход формирователя сигналов обратного хода соединен с одним из входов логического блока И, другой вход которого соединен с формирователем сигналов прямого хода и с одним из в.одо1з блока определения последовательности команд, а выход - с входом соответствующего ключа и другим входом блока определения команд, а выход ключа соединен с исполнительным механизмом, выход которого соединен с формирователем сигнала прямого .хода, при этом формирователь сигнала считывающей головки соединен с третьим входом блока определения последовательности команд и через соответствующий ключ - с исполнительным механизмом, а выход блока определения команд связан с соответствующим входом исполнительного механизма. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство по заявке № 2395953, кл. В 26 D 5/36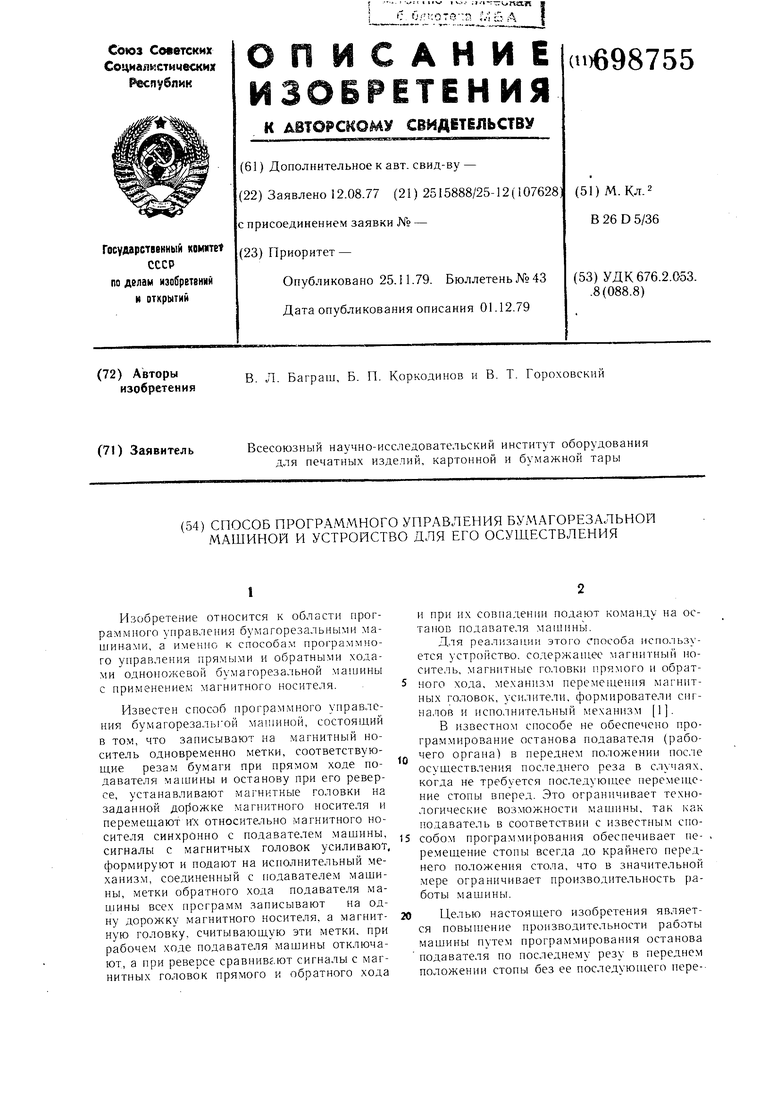
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ программного управления бумагорезальной машины и устройство для его осуществления | 1976 |
|
SU604676A1 |
| Способ программного управленияОдНОНОжЕВОй буМАгОРЕзАТЕльНОйМАшиНы | 1978 |
|
SU806409A1 |
| Способ программного управления одноножевой бумагорезальной машиной | 1980 |
|
SU885007A2 |
| Одноножевая бумагорезальная машина с программным управлением | 1978 |
|
SU946994A1 |
| Аппарат магнитной записи | 1982 |
|
SU1064312A1 |
| Устройство для определения положения объекта | 1983 |
|
SU1290374A1 |
| Аппарат магнитной записи | 1979 |
|
SU809328A1 |
| Устройство для управления транспортерной сортировкой | 1981 |
|
SU991378A1 |
| Устройство для управления аппаратом магнитной записи | 1979 |
|
SU781928A1 |
| УСТРОЙСТВО для МАГНИТНОЙ ЗАПИСИ | 1972 |
|
SU336692A1 |