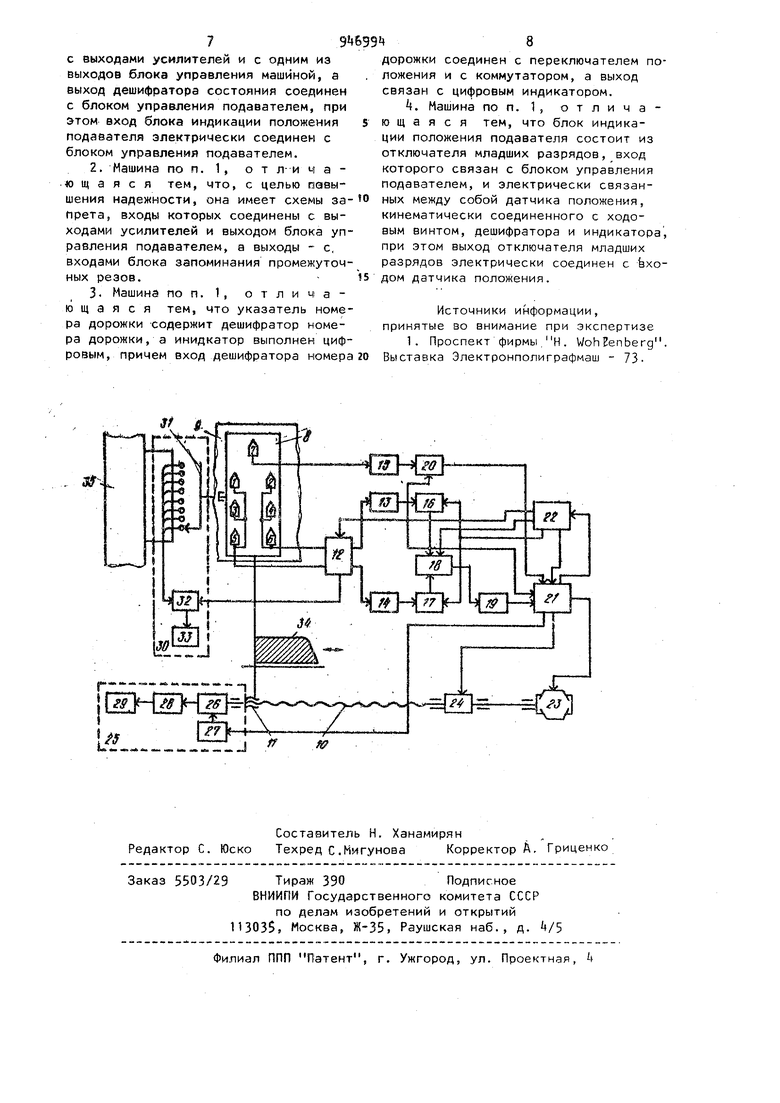
Изобретение относится к устройствам для автоматизации процесса резания в одноножевых бумагорезальных ма шинах. Известна одноножевая бумагорезальмая машина с программным управлением, содержащая размещенный в корпусе маши ны нож, соединенные посредством кинематической пары ходовой винт-гайка подаватель и каретку, на которой размещены магнитные головки, электрически связанные через коммутатор и усипи тали с блоками управления подавателем и машиной, электрически связанную с блоком управления подавателем тормозную систему, включающую кинематически соединенную с ходовым винтом тормозную муфту и двигатель, и указатель номера дорожки, электрически связанный с коммутатором, а кинематически с кареткой, включающий индикатор и переключатель положения и блок индикации положения подавателя CllМашина имеет низкую производительность поскольку в ней подаватель по окончании цикла реза начинает перемещаться малой скоростью. Цель изобретения - повышение производительности. Указанна.я цель достигается тем, что одноножевая бумагорезальная машина с программным управлением, содержащая размещенный в корпусе машины нож, соединенные посредством кинематической пары ходовой винт-гайка подаватель и каретку, на которой размещены магнитные головки, электрически связанные через коммутатор и усилители с блоками управления подавателем и машиной, электрически связанную с блоком управления подавателем тормозную систему, включающую кинематически соединенную с ходовым винтом тормозную муфту и двигатель, указатель номера дорожки, электрически связанный с коммутатором, а кинематически с кареткой, включающий индикатор и 39 переключатель положения и блок индикации положения подавателя имеет последовательно соединенные между собой блок запоминания промежуточных резов и дешифратор состояния, причем входы блока запоминания промежуточных резов электрически связаны с выходами усилителей и с одним из выходов блока управления машиной, а выход дешифратора состояния соединен с блоком управления подавателем,, при этом вход блока индикации положения подавателя электрически соединен с блоком управления подавателем. Кроме того, машина имеет схемы. запрета, входы которых соединены с выходами усилителей и выходом блока управления подавателем, а выходы с входами блока запоминания промежуточных резов. Указатель номера дорожки содержит дешифратор номера дорожки, а индикатор выполнен цифровым, причем Е5ход дешифратора номера дорожки соединен с переключателем положения и с коммутатором, а выход связан с цифровым индикатором. Блок индикации положения подавате ля состоит из отключателя младших ра рядов, вход которого связан с блоком управления подавателем.,и электрически связанных между собой датчика положения, кинематически соелине1-1ного с ходовым винтом, дешифратора и инди катора, при этом выход отключателя младших разрядов электрически соединен с входом датчика положения. На чертеже изображена функциональ ная схема машины. Машина содержит „ следующие блоки и устройство: магнит ные головки (МГ) 1-7, размещенные на каретке 8; магнитная лента (МЛ) Э ходовой винт 10; гайку 11; коммутатор 12; усилители (у) схемы запрета (СЗ) 16 и 17; блок 18 запоми нания промежуточных резов( БЗПР); дешифратор 19 состояния (ДС); схему 20 сравнения (СС) ; блок 21 управлени подавателем (БУП); блок 22 управлени машиной (БУМ); двигатель 23; тормозную муфту блок 25 индикации поло жения подавателя (БИПП); в который входят: датчик 26 положения (ДП); от ключатель 27 его младших разрядов(ОР дешифратор 28; указатель 23 положени подавателя (УП); указатель30 номера дорожки (уд), содержащий: переключатель 31 положения каретки, дешифратор 32 номера дорожки (ДД), индикатор 33 подаватель 3 и корпус машины 35Машина работает следующим образом. Во время движения подавателя 3 каретка 8 с МГ перемещается в горизонтальном направлении относительно неподвижной магнитной ленты 9 с помощью кинематической пары ходовой винтгайка 10 и 11. При считывании магнитных меток МГ 1, 3 и 5 вырабатывают сигнал на снижение скорости движения подавателя, а МГ 2, 4 и 6 - на его ос танов. Коммутатор 12 подключает к усилителям 13 и 1 одну из пар ИГ. По командам от БУМ 22 после отработки программы, записанной на одной из магнитных дорожек, ко,ммутатор 12 подключает следующую пару МГ. Усиленные сигналы МГ подаются на схемы 16 или 17запрета,СЗ блокируют выходы усилителей при неподвижном подавателе по команде е БУМ в период цикла реза, защищая систему от помех, возникающих в момент реза при включении мощных электомагнитных устройств, и этим повышают надежность работы системы. Сигналы с СЗ 1б поступают на вход БЗПР 18, БУП 21 и СС 20, а с СЗ 17 только на вход БЗПР 18. БЗПР 18 выполнен в виде реверсивного счетчика. В нем сигналы с подключенной в данный момент МГ 1, 3 или 5 суммируются, а сигналы с МГ 2, или 6 вычитаются. Состояние БЗПР 18 анализируется с помощью ДС 19- Когда расстояние между программными метками больше расстояния между магнитными головками, БЗПР 18в начале движения подавателя 3 находится в нулевом состоянии, так как число сигналов суммирования равно количеству сигналов вычитания. В этом случае движение подавателя начинается с большой скоростью. Если расстояние между метками меньше расстояния между МГ, то счетчик считает количество этих меток, и до тех пор. пока он не обнулится, подаватель начинает движение с малой скоростью. Таким образом, БЗПР 18 и ДС 19 совместно обеспечивают выбор начальной скорости движения подавателя в зависимости от расстояния между магнитными метками. Сигнал с ДС 19 поступает в БУП 21. БУП является промежуточным звеном системой программного управления, БУМ 22 и исполнительными механизмами: двигателем 23 привода подавателя и тормозной муфтой 2k. При приходе сигнала ос59танова с МГ 2, или 6 он с СЗ 16 | подается непосредственно в БУП 21. Движение подавателя 3 осуществляется с помощью двухскоростного электродвигателя 23 через кинематическую пару винт-гайка 10 и 11. По сигналу останова с БУП 21 с помощью тормозной муфты 2Ц происходит торможение винта. После отработки програм мы, записанной на одной из дорожек, подаватель должен реверсировать и за нять исходное положение для работы по следующей программной дорожке. В предлагаемой системе это достигает ся путем записи ограничительных мето для всех магнитных дорожек на одной специальной дорожке. Останов подавателя происходит с помощью СС 20 при совпадении сигналов от МГ 7, усиленного У 15, и от одной из МГ 2, Ц или 6. В этом случае сигнал останова подается непосредственно в БУП 21. При работе оператор должен знать номер отрабатываемой в данный момент магнитной дорожки. В предлагаемой системе МЛ 9 расположена над задним столом подавателя в направлении его хода. При таком расположении МЛ 9 применение указателя номера дорожки, аналогичного прототипу, лишено практ ческого смысла, так как оператор не может со своего рабочего места считы вать информацию. В предлагаемой системе применен электронный цифровой указатель 30 номера дорожки. В зависимости от положения каретки 8 замыкаются соответствующие контакты переключателя 31 положения каретки, закрепленного на корпусе машины 35Положение переключателя 31 и состояние коммутатора 12 являются входной информацией дешифратора 32 номера дорожки. В соответствии с ней происходит подключение индикатора 33. Автоматический переход с одной дорожки на другую и смена номера дорожки осу ществляются в крайних положениях хода подавателя по командам с БУМ 22. Предлагаемое техническое решение при большей, чем в прототипе, конструктивной простоте обеспечивает возможность постоянного контроля номера .дорожки с рабочего мегта оператора и тем самым, повышает производительность и удобство работы. Необходимым условием работы опера тора на машине является контроль расстояния от подавателя по линии ре за. В прототипе этот контроль может быть осуществлен только после останова подавателя. Поэтому оператор при работе на машинах такого типа устанавливает требуемый размер методом последовательных приближений. Это снижает производительность его работы. Предлагаемый блок 25 индикации положения подавателя основан на применении серийного датчика 26 положения (типа КП-3) . Датчик26 жестко связан с ходовым винтом и преобразует угловую меру в линейную. Информация с ДП 26 поступает на дешифратор 28 и с него на электроды соответствующих разрядов ламп указателя 29 положения подавателя. Однако из-за того, что допустимая скорость вращения КП-3 меньше рабочей скорости вращения подавателя, на этой скорости младшие разряды датчика отключаются с помощью ОР 27 по командам с БУП 21. Их включение производится автоматически при переходе на малую скорость движения подавателя и при ручном режиме работы. В результате оператор постоянно считывает информацию о положении подавателя: на большой скорости - в сантиметрах, на малой - в десятых долях миллиметра. Формула изобретения 1. Одноножевая бумагорезальная машина с программным управлением, содержащая размещенный - в корпусе машины нож, соединенные посредством кинематической пары ходовой винт-гайка подаватель и каретку, на которой размещены магнитные головки, электрически св:язанные через коммутатор и усилители с блоками управления подавателем и машиной, электрически связанную с блоком управления подавателем тормозную систему, включающую кинематически соединенную с ходовым винтом тормозную муфту и двигатель, указатель номера дорожки, электрически связанный с коммутатором, а кинематически с кареткой, включающий индикатор и переключатель положения, и блок индикации положения подавателя, отличающаяся тем, что, с целью повышения производительности, она имеет последовательно соединенные между собой блок запоминания промежуточных резов и дешифратор состояния, причем входы блока запоминания промежуточных резов электрически связаны
с выходами усилителей и с одним из выходов блока управления машиной, а выход дешифратора состояния соединен с блоком управления подавателем, при этом вход блока индикации положения подавателя электрически соединен с блоком управления подавателем.
2,Машина по п. 1, о т л-и ч а W щ а я с я тем, что, с целью павышения надежности, она имеет схемы запрета, входы которых соединены с выходами усилителей и выходом блока управления подавателем, а выходы - с, входами блока запоминания промежуточных резов.
3.Машина по п. 1, отличающаяся тем, что указатель номера дорожки содержит дешифратор номера дорожки, а инидкатор выполнен цифровым, причем вход дешифратора номера
дорожки соединен с переключателем положения и с коммутатором, а выход связан с цифровым индикатором.
k. Машина по п. 1, отличающаяся тем, что блок индикации положения подавателя состоит из отключателя младших разрядов, вход которого связан с блоком управления подавателем, и электрически связанных между собой датчика положения, кинематически соединенного с ходовым винтом, дешифратора и индикатора, при этом выход отключателя младших разрядов электрически соединен с fexoдом датчика положения.
Источники информации, принятые во внимание при экспертизе
1. Проспект фирмы,Н. WohEenberg. ВыстаЕжа Электронполиграфмаш - 73
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ программного управления бумагорезальной машиной и устройство для его осуществления | 1977 |
|
SU698755A1 |
| Устройство для программного управления одноножевой бумагорезальной машиной | 1978 |
|
SU716030A1 |
| Способ программного управления одноножевой бумагорезальной машиной | 1980 |
|
SU885007A2 |
| Система программного управления одноножевой бумагорезальной машиной | 1978 |
|
SU734633A1 |
| Способ программного управления бумагорезальной машины и устройство для его осуществления | 1976 |
|
SU604676A1 |
| Способ программного управленияОдНОНОжЕВОй буМАгОРЕзАТЕльНОйМАшиНы | 1978 |
|
SU806409A1 |
| Многозвенный механизм управления рабочими органами корнеклубнеуборочных машин | 1988 |
|
SU1724047A1 |
| ШВЕЙНЫЙ ПОЛУАВТОМАТ | 1969 |
|
SU244105A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ СИСТЕМЫ УПРАВЛЕНИЯ | 2015 |
|
RU2601368C1 |
| Бумагорезальная машина | 1978 |
|
SU821208A1 |
