.- Г Изобретение относится к устройствам преобразования рода энергии, в частности, к устройствам преобразования пневматнческих citrйалов В электрические.. Пневмоэлектрические преобразователи описаны В технической литературе 11Из известных наиболее близким по технической сущности является преобразоватёЯь, опн санный В 121.... Пневмоэлектрическнй преобразователь, соде жащий постоянный магнит с полюсный башмаKOivf катушку с сердечником, в зазоре которого расположен один конец якоря, выходаой канал, соедияошый с обмотками катуижи, и питающее сопло, соединенное с входным каналом, причем ВДОЛЬ продольной оси якоря выполнено приемное глухое отверстие, ось которого смещена от яостельно оси питающего сопла, и выходной канал, соединенный с обмотками катущки. Известное устройство имеет ограниченную мощность ВЫХОДНОГО сигнала. Целью изобретения является првыщемие мо ности ВЫХОДНОГО сигнала преобразователя, а эт цель достигается тем, что в нем якорь выполен в виде упругой пластины, соединенной с одого торца с постоянным магнитом, а с другого орца размещенной против питающего сопла, а азмеры постоянного магнита, упругой пластиы и питающего сопла и их взаимное располоение выбираются из условий: 0,87; 0,9 0,39 ff 0,42; 0,192 л 0,255; Хз х, х, где: Xi - длина свободного конца упругой пластины, Xj - длина постоянного магнита, Хэ - толщина упругой пластины, Х4 - пшрнна питающего сопла, Xs - высота питающего сопла, Хв - щирина упругой ппастинм, Х7 -щирина между торнами питающего сопла Н упругой пластины, а - угол конусности питаюп1ето сопла В радианах. На фиг. I показана пршщиииальняя схема преобразователя; на фи1. 2 i«)peu niiinKiuicn)
сопла; на фиг. 3 - торец якоря; на фиг. 4 взаимное расположение сопла и якоря.
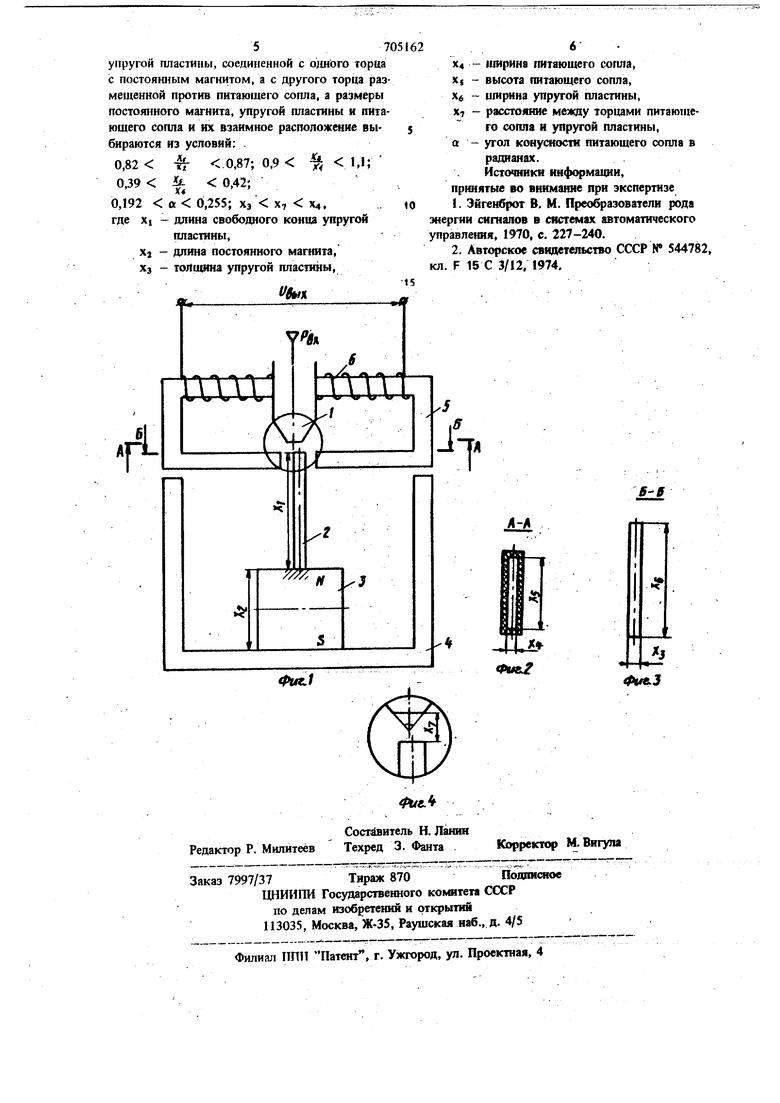
Пневмоэлектрический преобразователь содержит пневмомеханический узел, включающий питающее сопло 1, подключенное к входному каналу Р , и якорь 2, выполненный в виде упрутой пластины, например, из матнитомягкого материала, закрепленной консольно на постоянном маните 3. Якорь 2 располагается напроти питающего сопла 1. Продольные оси щелевого питающего сопла 1 и якоря 2 параллельны и сдвинуты друг относительно друга так, что од.на из боковых граней якоря 2 находится в од-. ной плоскости с соответствующей внутренней поверхностью среза сопла 1 (см. фиг. 4). Механоэлектрический узел вьшолнен, например, по мостовой М9пштной схеме и включает постоянны магнит 3 с полюсным башмаком 4, сердечник 5, например, из магнитомягкого материала и катущку индуктивности 6, обмотки которой подключены к выходному каналу Uj|цJJ .Свободный конец якоря 2 расположен в воздущном зазоре сердечника 5. Величина воздущного зазора выбирается в пределах максимального размаха колебаний свободного конца якоря 2.
Размеры постоянного магнита, якоря 2 и сопла 1 и их взаимное расположение выбираются из условий:
0,82 -g- 0,87;0,9 : 1,1;
А 4 .
0,39 г 0,42; 0,192 рад а 0,255 рад; Хз х Х4, где Xi - длина.свободного конца якоря 2,
Xj - длина-постоянного магнита,
Хз - толщина якоря 2,
Х4 - щирина сопла 1,
Xs - высота сопла 1,
Хб - щирина якоря 2,
Х7 - расстояние между торцами сопла 1 и якоря 2,
а -зтол сужения,сопла 1.
Эти соотношения определены на основании серии экспериментов, выполненных согласно теории планирования экстремальных экспериментов.
Величины параметров Хз, Х4, Xs, х, 47 поясняются фиг. 2, 3, 4.
Пневмоэлектрический преобразователь работает следующим образом.
При подаче пневматического сигнала Р вх 0,14МП ± 10%) струя, вытекающая из питающего сопла 1, воздейсгаует His торец и на одну из боковых поверхностей якоря 2, консольно закрепленного i на постоянном магните Свободный конец якоря 2 начинает изгибаться При этом струя будет воздействовать на упругую боковую поверхность якоря 2, заётаййяя свободный конец якоря изгибаться в другую
сторону. Таким образом, возбужлаются автоколебания якоря 2 в зазоре сердечника 5. Автоколебательный установившийся процесс характеризуется определенным размахом и частотой колебаний якоря 2. Колебания якоря сопровождаются акустическим эффектом.
В катушке индуктивности 6 наводится ЭДС. и в выходном канале появляется электрический сигнал
При сиятии входного сигнала Р „ колебалния якоря 2 прекратятся и в выходном канале
электрический сигнал U станет равным нулю.
Выходной электрический сигнал и тенерируется в течение всего времени действия
входного сигнала Р.
ВХ
Параметры сопла 1 и якоря 2, а также их взаимное расположение выбраны из условия достижения оптимального режима работы преобразователя.
В качестве параметра, по которому оптимизирован процесс, выбрана мощность выходного электрического сигнала. В качестве факторов
выбраны: длина свободного конца якоря 2-Х, толщина якоря 2-Хз, ширина якоря 2-Хб, ширина сопла 1-Х4, высота сопла 1-Xs, угол сужеЕшя сопла 1 - а и расстояние между торцами сопла 1 и якоря 2-Х7.
В результате проведенных серий зкспериментов, согласно теории планирования экстремальных экспериментов, определены оптимальные размеры сопла 1 и якоря 2, при соблюдении KOTOpbix обеспечивается повышение электрической мощности.
Устройство может быть использовано в системах передачи сигиалов на большие расстоя1шя без применения дополнительного источника электроэнергии. Энергия передаваемого пневматического сигнала непосредственно преобразуется в электрическую энергию.
Технике-экономический эффект достигаетей за счет уменьшения затрат при использовании устройства в комбинированных системах
управления, так как исключается необходимость в дополнительном истовдике электроэнергии.
Формула изобретеиия
Пневмоэлектрический преобразователь, содержащий постоянный магнит с полюсным башмаком; катушку с сердечником, в зазоре которого расположен один конец якоря, выходной канал, соединенный с обмотками катушки, и питгцощее сопло, соединенное с входным каналом, отличающийся тем, что, с целью повышения мощности выходного сигнала преобразователя, в нем якорь выполнен в виде
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмоэлектрический преобразователь | 1978 |
|
SU922349A2 |
| Пневмоэлектрический преобразователь | 1974 |
|
SU544782A1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 1972 |
|
SU356379A1 |
| Способ определения содержания глюкозы в крови | 1988 |
|
SU1767426A1 |
| Устройство управления групповым гидроприводом | 1989 |
|
SU1707290A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЕРВОКЛАПАН | 1992 |
|
RU2030658C1 |
| Пневмоэлектрическое устройство для передачи сигналов | 1978 |
|
SU781874A1 |
| Параллельный процессор Хаара | 1989 |
|
SU1667103A1 |
| Устройство для управления электродвигателем механизма поворота карьерного экскаватора | 1986 |
|
SU1461839A1 |
| Непосредственный преобразователь частоты | 1990 |
|
SU1837377A1 |
