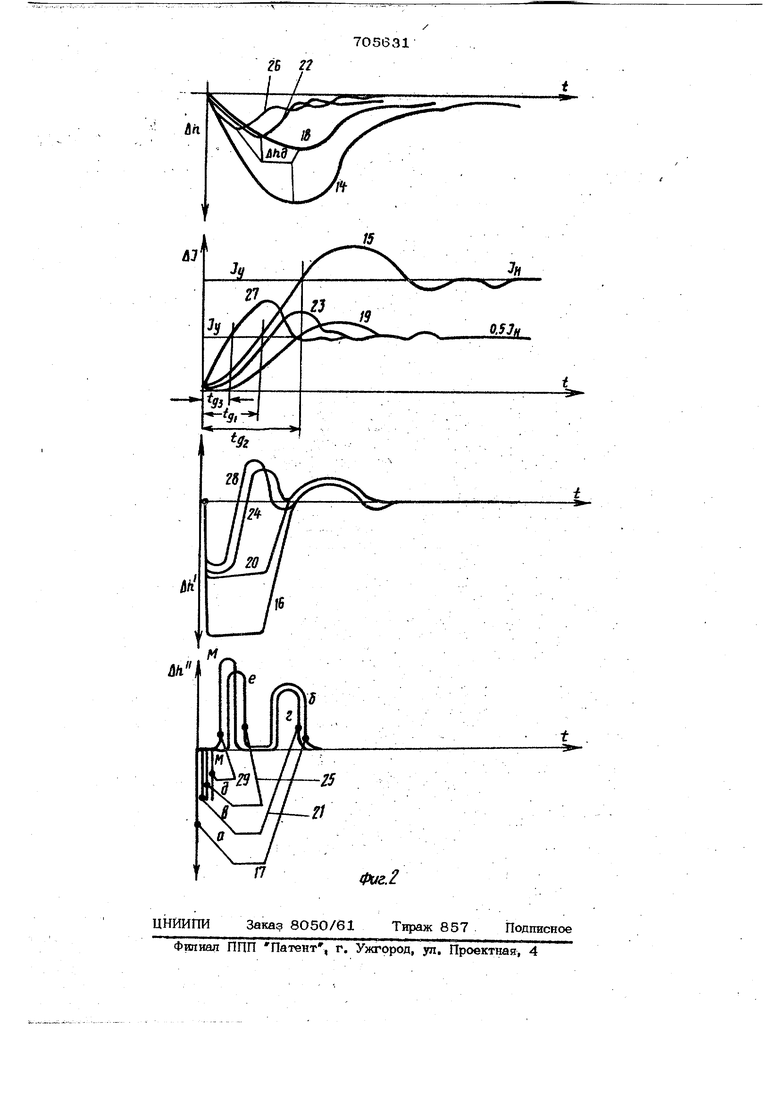
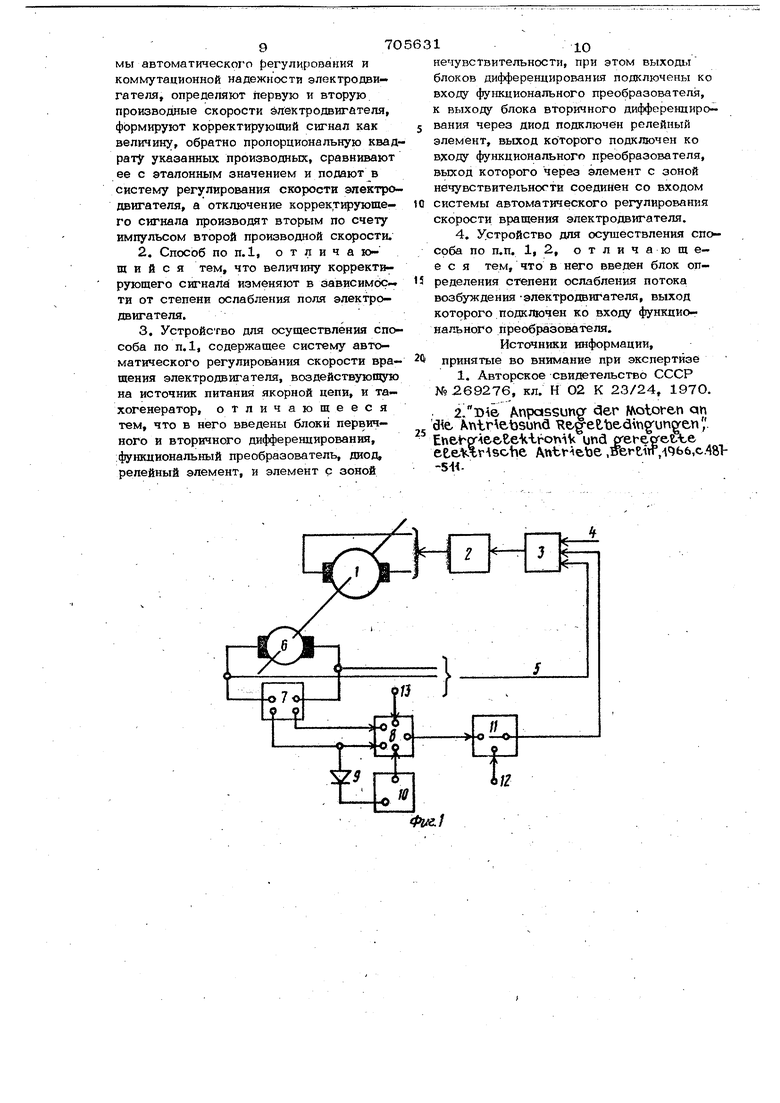
ритепьной коммутации электрической машины должно иметь место соотношение: doja., лЗ :COIlSt - 1 Показатель X который, как известно, может достигать значения 20О-300 1/сек поясняет, что при малых нагрузках двигателя по току, меньших Номинальног значения (т.е. когда i г- .. аз / JH скорость нарастания 1 гЦ. якоря может быть увеличена так, чтобы величина X оставалась неизменйой. При нагрузках двигателя по току, бо.п.шюс номинальной, скорость нарастания тока должна уменьшаться, а при мапьк значениях тока нагрузки двигателя, по условиям коммутации, допустима боль . шая степень отставания поля добавочных ПОЛЮСОВ от коммутирующего поля ;зкоря, чем при больших нагрузках, т.е. допустима большая скорость нарастания тока. Увеличение скорости нарастания Чока якоря при нагрузках электродвигателя, меньших ноМшальной, позволяет существ но улучшить быстродействие и качество системы автоматического регулирования скорости электродвигателя постоянного тока при ударной нагрузке. Ограничение скорости нарастания тока якоря электро(Овигателя при нагрузках, выше номинальной, позволяет повысить коммутационную надежность электродвигателя, Целью предлагаемого способа и реали зующе:ро его устройства является повы- 1яёние быстрт Действйя системь автоматического регулирования и коммутационной надежности электродвигателя. Для этого в предлагаемом способе определяют сигналы первой и второй про изводных скорости вращения электродви гателя при ударной нагрузке, преобразу- К)Т их в величину, обратно пропорцйональ ную квадрату указанных производньрс, сравнивают ее с эталонным значением, и подают в систему автоматического рег лирования скорости вращения электродви гателя, а отключение корректирующего сигнала производят вторым импульсом второй производной его скорости. Величину корректирующего сигнала изменяют также в зависимости от степени ослабления поля электродвигателя. В устройство, содержащее систему автоматического регулирования скорости вращения электродвигателя, воздействую- на источник питания якорной цепи, И тахогенератор, введены блоки первичного и впоричного дифференцирования, функциональный преобразователь, диод, элемент с зонной нечувствительности и релейный элемент, при этом выходы блоков дифференцирования подалючены ко ,входу функционального преобразователя, к выходу блока вторичного дифференц и ровен ия через диод подключен релейный элемент, выход подключен ко входу функционального преобразователя, выход которого через элемент с зоной нечувствительности Соединен со входом системы автоматического регулирования скорости вращения электродвигателя. Ко входу функционального преобразователя, кроме того, подключен выход блока определения степени ослабления потока электродвигателя. На фиг. 1 изображена функциональная схема устройства, на .фиг. 2 представлены кривые, показывающие изменение параметров электродвигателя при приложе- . НИИ ударной нагрузки. Устройство (фиг. 1) содержит двигатель 1, питающийся от источника 2 и имеющий Систему авторегулирования скорости 3, куда подается задающий сигнал 4 и сигнал- 5 обратной связи по скорос ти от тахогенератора 6. К тахогенератору б подключен блок дифферетщирования 7, осущвств,пяющий однократное и двухгкратное диф(|)еренцирование скорости дви- гателя в момент приложения нагрузки к валу двигателя и выдаюший в функциональный преобразователь 8 сигналы, пропорционаяьные соответственно начальным значениям 1-й и 2-й производной скорости двигате/ш, отображающих момент нагрузки на валу двигателя. Кроме того, сигнал второй производной через диод 9 поступает также на вход релейного блока 10, на выходе которого, независимо от нагрузки двигателя в пределах от минимальной до номинальной и вьпие, возникает запирающий сигнал от второго по счету импртьса второй производной скоросТи двигателя. Корректирующий сигнал на выходе функционального преобразователя 8 изменяется обратно пропорционально квахь рату статической нагрузки на валу двигателя, определяемой входными сигналами первой и второй производной. Корректирующий сигнал поступает через элемент с зоной нечувствительности 11 на вход системы авторегулирования 3. Величина зоны нечувствительности элемента 11 определяется заданием 12, соответствующим той минимальной гмгрузке электродвигателя 1, при котором в систему регулирования 3 проходит корректирующий сигнал.. . Таким образом, по отдельному кана- лу в систему регулирования 3 поступает корректирующий сигнал, приводящий к изменению параметров или коэффициента усиления системы и, следовательно, частоты среза обратно пропорционально квадрату статической нагрузки на валу двигателя, начиная от момента времени t О. Корректирующий сигнал существует все время от момента времени t . О до момента появления второго по счету импульса второй производной скорости даигателя, т.е. запирающего сигнала, возникающего при достижении током двигателя первого установивщегося значения и отключающего корректирую- щий сигнал.. При этом благодаря диоду 9 корректирующий сигнал отключается запирающим сигналом только от второго п счету импульса второй производной скорости двигателя, а первый по импульс этой производной, имеющий другую полярность) на вход функционального преобразователя не проходит, Отметим, что для учета степени ослаблен 1я потока возбуждения двигателя, когда при том же моменте сопротивлени на его валу потребляется больший якорный ток и, следовательно допустима меньшая скорость его нарастания, на . вход функционального преобразователя 8 Подключен выход 13 не показанного на рисунках узла или органа ослабления по тока возбуждения двигателя, благодаря ч му при ослаблении потока возбуждения автоматически снижается уровень корректирующего сигнала. Сущность предложенного способа поясняется фиг. 2. На фиг. 2 кривые 14 и 13 соответственно показывают изменение во времени отклонения скорости ЛИ и тока якоря электродвигателя постоянного тока при ударной -нагрузке, например, в процессе захвата металла при прокатке. . Средняя скорость нарастания тока якоря электродвигателя определяется уг лом наклона кривой 15 на участке от fe О до момента ivj достижения ТОКО первого установившегося значения , соответствующего достижением скорость (кривая) максимального, отклонения kVig Указанные кривые 14 и 15 соответствуют режиму наброса номинальной нагрузки двигателя. Для этогорежима показаны также соответствешю кривые 16 и 17 изменения ускорения Д )i и второй производной скорости &Vl Д11Игателя, причем, для кривой 17 показаны первый а и второй б по счету ик пульсы второй производной скорости после скачкообразного приложения нагрузки к валу двигателя. В щзугом случае к двигателю скачком прикладывается, нагрузка, равная полови- не от номинальной, т.е. при Зу-О,5ЛцДля этого случая также приведены кривые изменения приращенщ скорости 18, тока 19, ускорения 20, и второй производной скорости 21 даигателя, где соответственно первый и второй по счету импульсы второй производной скорости для этого случая обозначены в и г. Как видно из сопоставления кривых изменения приращения скорости и тока для обоих случаев, во втором случае скорость изменения тока уменьшается примерно в два раза по сравненшо с таковой в первом случае (угол наклона кривой 19 меньше,чем кривой 15/, что обычно и имеет место при меньшей нагрузке дв1{гателя4 Время достижения токок нового установившегося значения 0,5 Зц равно t 2. На фиг. 2 кривыми 22, 23, 24 и 25 соответственно показаньг приращение скорости, тока, ускорения и второй производной скорости {где первый по счету кктпульс д, а второй - е) двигателя при скачке нагрузки, также равной половинной от номинальной (0,5 , ), но при использовании средств, сохракяюш:их скорость на- растания тока двигателя такой же, как и при номинальной нагрузке, и, следова тельно, при уменьшении вдвое времени достижения током значения 0,5 Dц с величины is,, до величины fe-j.jВ. этом случае максимальное (динамическое) падение скорости Л.м g уменьшается по сравнению со случаем с такой же (половинной) нагрузкой, но при уменьшении скорости нарастания тока двига- теля, как на кривой 19. Поскольку произведение скорости нарастания Тока на краткость его изменения, (по отношению к номинальному) может, по условиям коммутации, оставаться постоянным, то, например, при половинной нагрузке двигателя по току, скорость нарастания последнего может быть в два раза увеличена по сравнению с таковой при номинальной нагрузке, а время , достижения током первого установившегося значения 0,5 0ц по сравнению со временем у уменьшится в два раза, а по сравнению со временем iVL уже в четыре раза. Такой сутучай представлен соответственно кривыми 26, 27, 28 и 29 приращения скорости, тока,ускорения и второй производной скорости (где первый и второй по счету импульсы обозначены м и н) На кривых 17, 21, 25 и29 первые по счету импульсы второй производной скорости а б я и м для -нагляд ности, покаваны расположенными рядом, хотя, в действительности, они совпадают Как следует из кривых 15, 19, 23, 27 изменения тока время Ь ,j и-t достижения током первого установивши- гося значения соответственно для кри- вых 15 (также 19) 23 и 27 при выполнении условий (1} должно изменяться прямо пропорционально квадрату статиче кой нагрузки на валу двигателя, т.е. bi V . (-5-(1 t)-(2) / Время i ,4 достижения током первого установившегося значения (или скорость максимума динамического падения Л Ha при ударной нагрузке однозначно связан Ои,-. системы автомас частотой среза ср тического регулирования, i.g iz UJ.-.(3) На основании (2), можно сделать вы вод, что длн выполнения условий (1) частота среза и/Ьлсистемы авторегулирования должна изменяться обратно пропорционально квадрату статической на грузки на валу двигателя т.е. . ср.у а /АЗиУ ) где частота среза при номййальной нагрузке двигателя, Для регулирования скорости нарастания тока якоря электродвигателя и выполнения условия (1) необходимо иметь упреждающую информацию о начале приложения нагрузки к валу двигателя и о величине этой нагрузки в момент време -fc О. Далее, обратно пропорциональ но квадрату этой нагрузки на определен ное время необходимо изменить частоту среза системы автоматического регулирования.. Известно, что упреждающую информацию о возникновении нагрузки на валу двигателя возможно получить с помощью сигналов, пропорциональных начальным значениям ускорения и второй произво; ной скорости электродвигателя при ударной нагрузке. Такие сигналы отображают величину нагрузочного момента валу двигателя еще до того, как ток двигателя и его производная возрастут до необходимого, отвечающего данному нагрузочному моменту значения. Действительно, известно, что для скачкообразного изменения нагрузки для мсЬ мента времени -t О н альное отрицательное ускорение двигателя ЛИ (о) равно: ДП COizгде Q приведенный маховый момент на валу двигателя. Таким образом, &)i(o) пропорцонально нагрузочному моменту (току) на валу двигателя.. . Для всех представленных на фиг. 2 криЬых приращения скорости и тока электродвигателя при ударной нагрузке приведены соответствующие кривые изменения ускорения (кривые 16, 2О, 24, 28) и второй производной скорости (кривые 17, 21, 29), включая пгервый и второй по счету импульсы второй производной скорости а и б, в и г, д и е, м и п). Рассмотренный способ применим как при набросе, так и сбросе нагрузки и как при постоянной скорости вращения двигателя перед набросом или сбросом нагрузки, так и при линейном или другом функциональном законе изменения скорости.. Область применения предлагаемого способа - электроприводы непрерывных и реверсивных прокатных станов, и другие механизмы с ударными режимами работы и приводными электродвигателями постоянного тока. Формула изобретения 1. Способ регулирования скорости нарастания тока якоря, электродвигателя постоянного тока при ударной нагрузке, заключающийся в воздействии на электродвигатель корректирующего сигнала, отличающийся тем, что, с целью повышения быстродействия систем мы автоматического (эегулирования и коммутационной надежности электродвигателя, определяют первую и вторую, производные скорости электродвигателя, формируют корректирующий сигнал как величину, обратно пропорциональную квад рату указанных производных, сравнивают ее с эталонным значением и подают в систему регулирования скорости электро двигателя, а отключение корректирующего сигнала производят вторым по счету импульсом второй производной скорости. 2.Способ по П.1, о т л и ч а юш и и с я тем, что величину корректирующего сигнале изменяют в зависимее-, ти от степени ослабления поля электродвигателя, 3.Устройство для осуществления спо соба по П.1, содержащее систему автоматического регулирования скорости вращения электродвигателя, воздействующую на источник питания якорной цепи, и та- хогенератор, отличающееся тем, что в него введены блоки первичного и вторичного ди4)ференцирования, ;фушщиональный преобразователь, диод, релейный элемент, и элемент с зоной 7 110 нечувствительности, при этом выход1,1 блоков дифференцирования подключены ко входу фу1пщионального преобразователя, к выходу блока вторичного дифференцирования через диод подключен релейный элемент, вьисод которого подключен ко входу функционального преобразователя, выход которого через элемент с зоной нечувствительности соединен со входом системы автоматического регулирования скорости вращения электродвигателя. 4, Устройство для осуществления способа по П.П. 1, 2, отличающееся тем, что в него введен блок определения степени ослабления потока возбуждения -электродвигателя, выход которого подключен ко входу функционального преобразователя. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР №269276, кл. Н 02 К 23/24, 1970. 2/l)ie Anpassung 3ег NVotofen Qn die At tr etsund Reg-etbedwgfun en Enet pAeeEek-iironiV und cret-ecrette ee.eV. Antriebe ,вегЕ,1тг,1ЧЬб,с.481-5И.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1984 |
|
SU1228208A2 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Интегрирующий привод постоянного тока | 1989 |
|
SU1716480A1 |
| Электропривод постоянного тока | 1980 |
|
SU921014A1 |
| Устройство для управления двигателем постоянного тока | 1978 |
|
SU748762A1 |
| Электропривод постоянного тока | 1978 |
|
SU744883A1 |
| Электропривод постоянного тока с упреждающим токоограничением | 1978 |
|
SU1105999A1 |
| Устройство для управления электроприводом постоянного тока | 1981 |
|
SU1025007A1 |
| Способ определения электромагнитной постоянной времени якорной цепи электродвигателя постоянного тока | 1985 |
|
SU1307525A1 |
| СПОСОБ СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2385530C1 |