1
Изобретение относится к электротехнике и может быть использовано для определения электромагнитной постоянной времени якорных цепей врщающихся машин постоянного-тока.
Целью изобретения является повьпч ние точности.
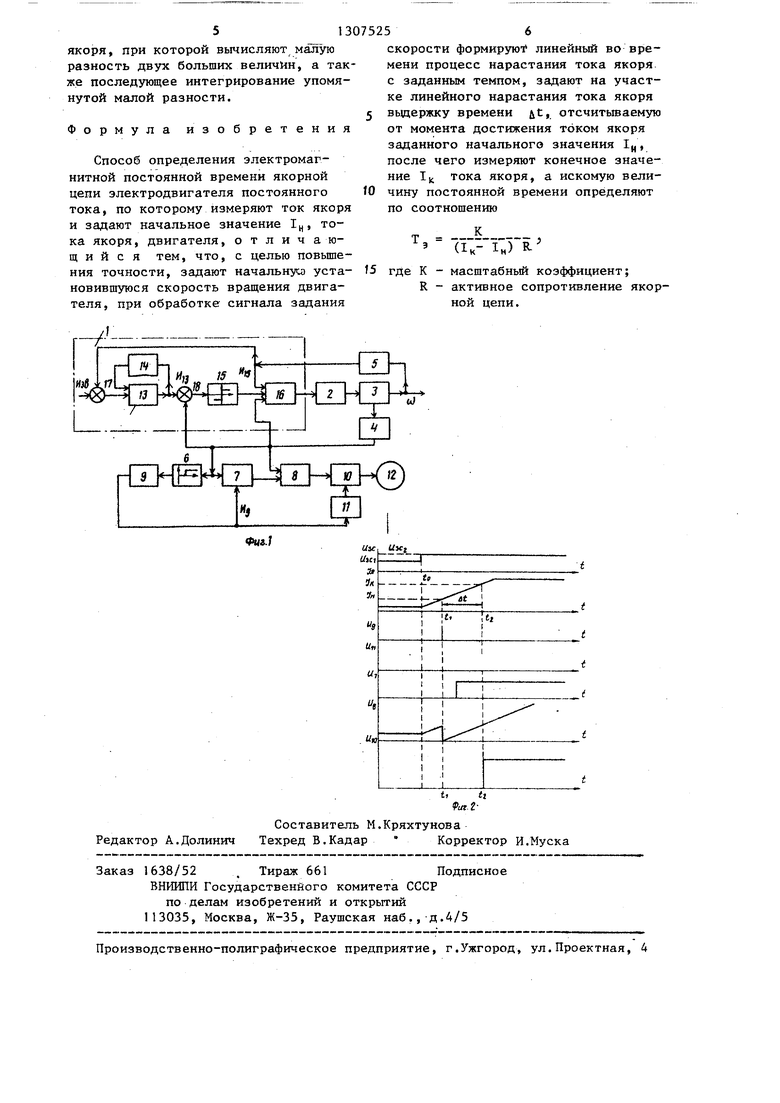
На фиг.1 представлена схема элекропривода; на фиг.2 - диаграммы, поясняющие работу устройства.
Электропривод содержит последовательно включенные узел 1 формирования линейного процесса нарастания тока якоря, тиристорный преобразователь 2 и двигатель 3, датчик 4 тока якоря и датчик 5 скорости.
На выход датчика 4 тока подключе вход релейного элемента 6, информационный вход аналогового запоминающего устройства 7 и вход сумматора второй вход которого соединен с выхдом запоминающего устройства 7, уп равляю1 1ий вход которого через форми
рователь 9 коротких импульсов подклю- чен к выходу релейного элемента 6.
На выход сумматора 8 подключен ин- формационньш вход аналогового запоминающего устройства 10, управляющий вход которого через блок 11 регулируемого запаздьшавия соединен с выходом формирователя 9 импульсов, а выход подключен к измерительному прибору 12, показь1вающему значение электромагнитной постоянной времени
(Тд).
Узел 1 содержит последовательно включенные регулятор 13 скорости с блоком 14 ограничения в цепи обратной связи, релейный элемент 15 и про- порциональный регулятор 16 тока, причем элемент 17 сравнения на входе регулятора 13 скорости, а также первый вход регулятора 16 тока соединены с выходом датчика 5 скорости, вы- ход датчика 4 тока подключен к элементу 18 сравнения на входе релейного элемента 15 и к второму входу регулятора 16 тока, третий вход которого
соединен с выходом релейного элемента 15. Выход регулятора 16 тока, который является выходом узла 1 формирования линейного процесса нарастания тока якоря, подключен к входу тиристорно- го преобразователя 16., а второй вход регулятора 13 скорости, который является входом этого узла, соединен с источником напряжения задания скорости двигателя (
Устройство для осуществления данного способа измерения электромагнитной и постоянной времени (Т ) работает следующим образом.
Вначале задают начальную установившуюся скорость вращения QJ двигателя 3, которая пропорциональна напряжению и на входе регулятора 13 скорости. Затем, в момент времени t, увеличивают сигнал задания скорости до значения U При отработке этого сигнала с помощью узла 1 формируют линейный во времени процесс йараста- ния тока якоря 1.При достижении током якоря заданного начального значения 11, в момент времени t, появля0
„
. . ется сигнал на выходе релейного элемента 6 и формирователь 9 импульсов вырабатьгоает короткий импульс U, которьй передается на управляющий вход аналогового запоминающего устройства 7. При поступлении этого импульса в запоминающем устройстве 7 записьшается сигнал, поступающий на его информационный вход, пропорциональный начальному значению 1ц тока якоря, который сохраняет свое значение до кончания процесса измерения. Записанное в запоминающее устройство 7 напряжение Uy подается на вход сумматора 8, к второму входу которого от датчика 4 тока подводится напряжение, пропорциональное текущему значению тока якоря 1я.
с .
На выходе сумматора 8 вырабатьша- ется напряжение Ug, пропорциональное
30
разности между текущим и начальным .значением тока якоря, которое поступает на информационный вход аналогового запоминающего устройства 1 О. Импульс и, сформированньм устройством 9, поступает на вход блока 11 запаздьшания и через заданную выдержку времени t, в момент времени
t( + ut на выходе этого
ка, соединенном с управляющим входом
аналогового запоминающего устройства 10, появляется короткий импульс и . ПРи поступлении этого импульса в запоминающем устройстве 10 записывается сигнал Ug, поступающий на его информационный вход от сумматора 8. Моменту времени t2 соответствует конечное значение 1, тока якоря и, следовательно, сигнал Ug на выходе сумматора 8, пропорциональный разности токов Т. и1н. Этот сигнал записьшается в запоминающее устрой3
ство 10 и передается на его выход, к которому подключен измерительный прибор 12. Выходное напряжение аналогового запоминающего устройства пропорциональное разности токов I.,
и 1ц, преобразуется в измерительном приборе 12 в сигнал, пропорциональный измеряемой постоянной времени
Т- согласно равенству
т
э (U) R
(1)
где К - масштабный коэффициент; 1ц, Ту.- соответственно начальное и конечное значение тока якоря;
R - сопротивление якорной обмотки двигателя.
Узел формирования линейного процесса нарастания тока якоря I работает следующим образом.
В установившихся режимах работы электропривода алгебраическая сумма сигналов Uj и U элемента 18 сравнения во входной цепи релейного элемен та 15 равна нулю, поэтому среднее . значение выходного сигнала релейного элемента 15, переключающегося с большой частотой, также равно нулю.
Напряжение U на выходе преобразователя 2 формируется при этом с помощью положительных обратных связей, поступающих на входы регулятора 16 тока от датчика 4 тока и от датчика 5 скорости и определяется зависимостью
и
К
i(K,ec Kj
(бТ 4
ричем Kj t
16С
Kj-W Е;
2 (бС 4
1я
Я )
I,); (2)
(3) (4)
.4
де К
(6с
(6Т
коэффициенты усиления пропорционального регулятора 16 тока по каналам обратной связи по скорости двигателя и по току якоря, соответственно;
К - коэффициент усиления преобразователя 2;
Kg - коэффициенты передачи датчика 4 тока и датчика 5 скорости. При увеличении сигнала задания корости и5 сигнал и,з на выходе
К
.4
регулятора 13 скорости становится больше сигнала U, поступающего от датчика 4 тока. При этом срабатьша- ет релейный элемент I5 и вьщает постоянное по величине напряжение U,j , которое является заданием на величину производной тока якоря.
Напряжение преобразователя U определяется при этом уравнением
Ua
к.(к.б,
6г
К,
),
(5)
5
где К
16 ПТ
0
- коэффициент усиления регулятора тока по каналу формирования производной тока якоря.
Из сопоставления : уравнения (5) с уравнением равновесия якорной цепи
и Е +
1я. 5.
d t
(6)
30
25
с учетом равенства (3) и (4) вытекает, что ток якоря I,, в процессе отработки увеличенного сигнала задания Ujp увеличивается в функции времени по линейному закону с производной (5: /тч
dt R Та
Поскольку при линейном нарастании
тока якоря имеет место соотношение I
Eli - -Ibl-Iii dt ut
(8)
Масштабный коэффициент К равенства (1) определяется зависимостью
К К,
K,6nrU,5
&t
(9)
5
5
Заданная величина начального тока I устанавливается изменением зоны нечувствительности релейного элемента 6. Заданное значение выдержки времени ut устанавливается регулированием времени запаздьшания блока 11. Заданный темп нарастания тока якоря устанавливается путем измене- ния напряжения выхода релейного элемента 15.
Данный электропривод, осуществляющий способ определения-электромагнитной постоянной времени якорной цепи электродвигателя постоянного тока, позволяет повысить точность определения электромагнитной постоянной времени, так как исключается операция вычисления ЭДС самоиндукции
якоря, при которой вычисляют малую разность двух больших величин, а также последующее интегрирование упомянутой малой разности.
Формула изобретения
Способ определения электромагнитной постоянной времени якорной цепи электродвигателя постоянного тока, по которому измеряют ток якоря и задают начальное значение 1„, тока якоря, двигателя, о т л и ч а ю- щ и и с я тем, что, с целью повьше- ния точности, задают начальнусо установившуюся скорость вращения двигателя, при обработке сигнала задания
скорости формирую линейный во времени процесс нарастания тока якоря с заданным темпом, задают на участке линейного нарастания тока якоря вьщержку времени t, отсчитьгоаемую от момента достижения током якоря заданного начального значения 1ц, после чего измеряют конечное значение Ij, тока якоря, а искомую величину постоянной времени определяют по соотношении
Тэ
К
(K- IJ R
t5 где К - масштабньй коэффициент;
R - активное сопротивление якорной цепи.
Редактор А.Долинич
Составитель М.Кряхтунова Техред В.Кадар Корректор И.Муска
Заказ 1638/52 Тираж 661Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул. Проектная, 4

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1984 |
|
SU1228208A2 |
| Устройство для управления электроприводом постоянного тока | 1981 |
|
SU1025007A1 |
| Способ астатического регулирования скорости двигателя постоянного тока | 1982 |
|
SU1067581A1 |
| Электропривод постоянного тока | 1985 |
|
SU1332501A1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| Устройство для измерения электромагнитной постоянной времени якорной цепи электродвигателя | 1977 |
|
SU736278A1 |
| Электропривод по системе генератор-двигатель | 1982 |
|
SU1078564A1 |
| Электропривод постоянного тока | 1982 |
|
SU1072224A1 |
| Электропривод постоянного тока | 1984 |
|
SU1159141A1 |
| Электропривод постоянного тока | 1981 |
|
SU1005256A1 |
Изобретение относится к электротехнике и может быть использовано в системах управления двигателями постоянного тока. Устройство позволяет с высокой точностью определять электромагнитную постоянную времени якорной цепи электродвигателя постоянного тока за счет того, что источник напряжения задания задает начальную установившуюся скорость вращения двигателя 3, узел 1 формирует линейный во времени процесс нарастания тока якоря двигателя 3 с заданным темпом. На участке линейного нарастания тока якоря блок 1 1 обеспечивает вццержку времени дt,отсчитываемую от момента достижения током якоря заданного начального значения, после чего измеряют конечное значение тока якоря, по результатам изме-: рения вычисляют электромагнитную постоянную времени якорной цепи двигателя. 2 ил. с (О (Л со СП Ю сд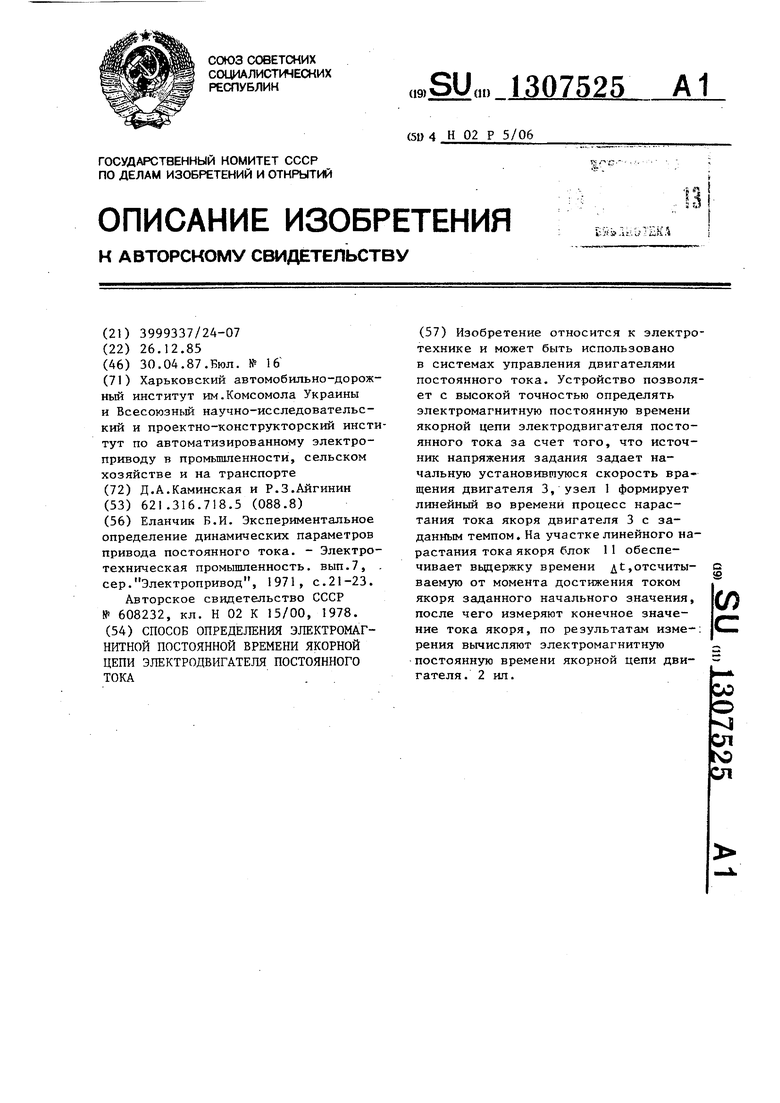
| Еланчик Б.И | |||
| Экспериментальное определение динамических параметров привода постоянного тока | |||
| - Электротехническая промышленность, вып.7, | |||
| сер.Электропривод, 1971, с.21-23 | |||
| Способ определения электромагнитнной постоянной времени якорной цепи электродвигателя постоянного тока | 1975 |
|
SU608232A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
