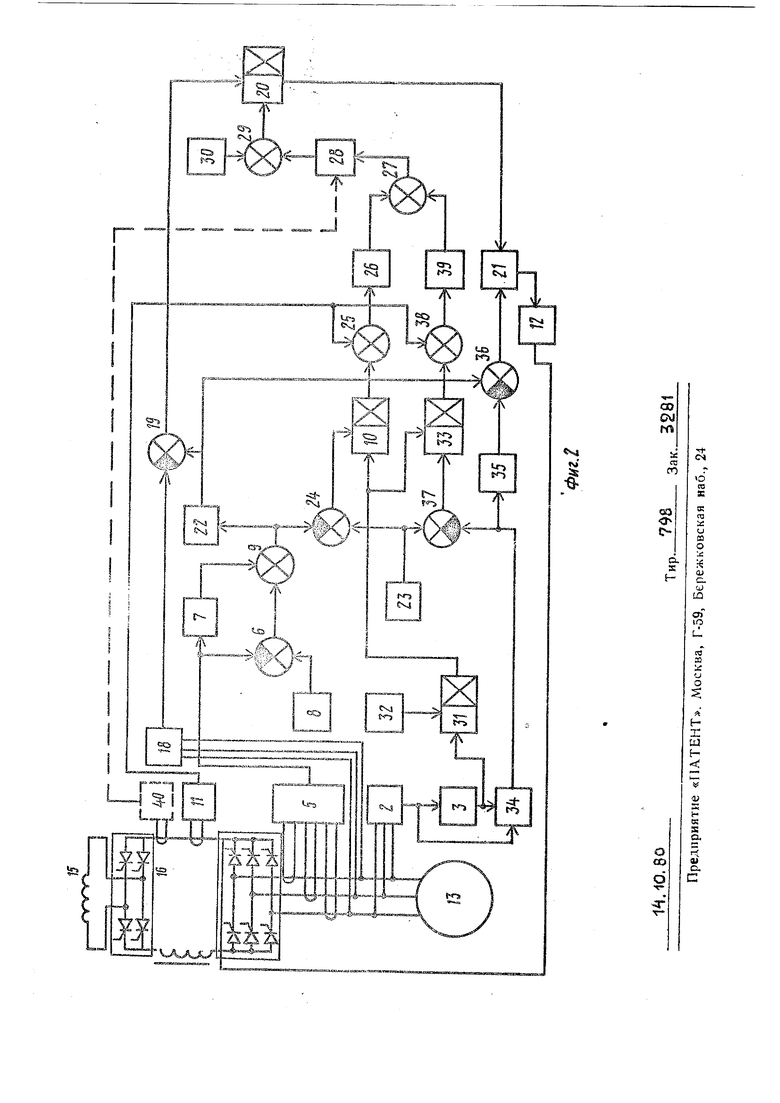
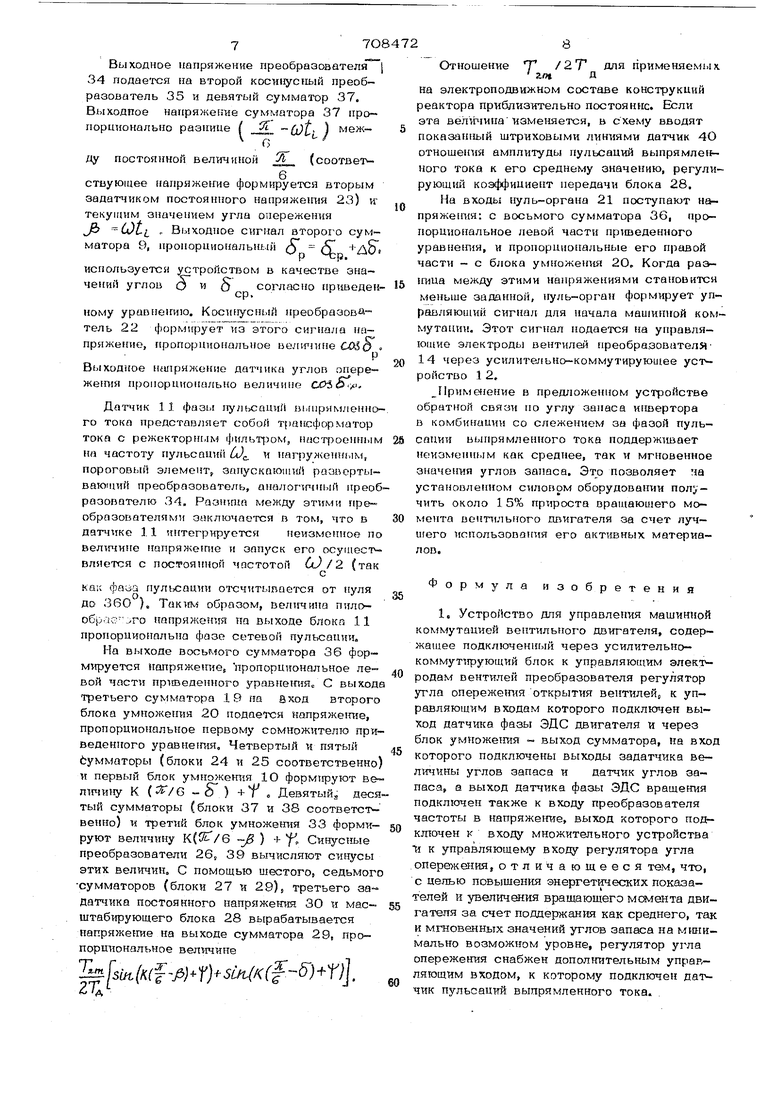
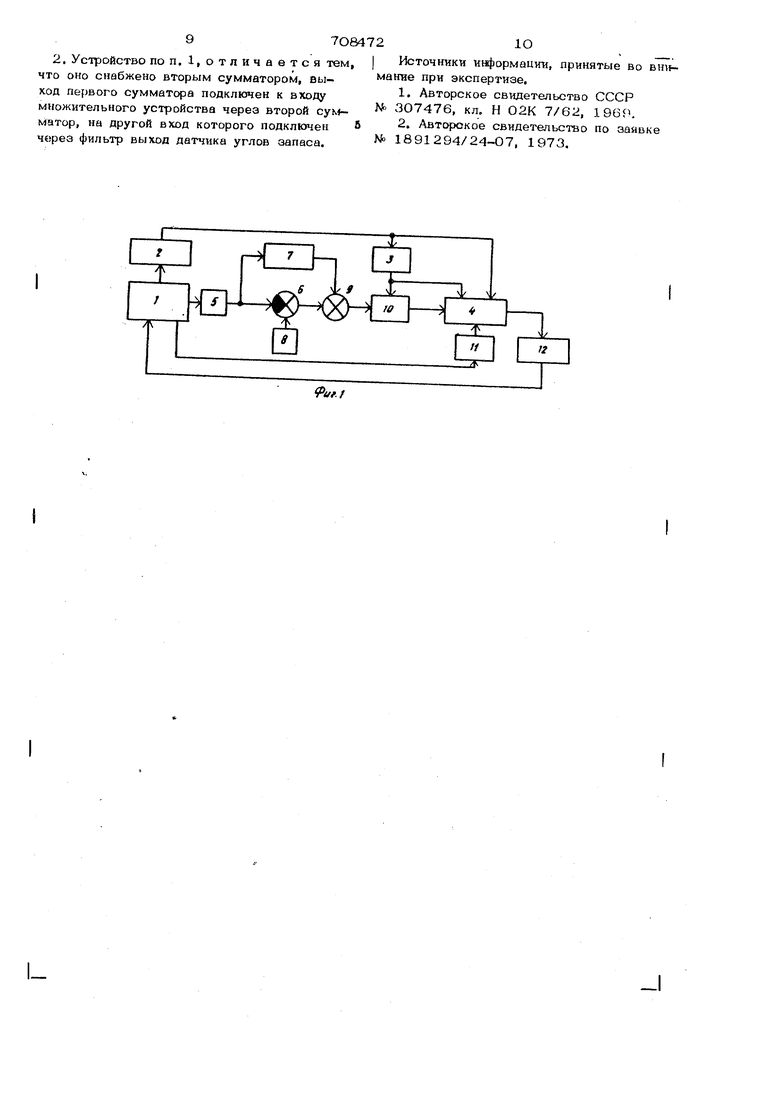
Целью изобретения является повышенгке энергетических показателей вентильного двигателя при питании его от вьшрямителя за счет поддержания как среднего так Ш мгновенных. значеЕшй углов запаса на минимально допустимом уровне. Это достигается тем, что предложенный регулятор снабжен дополЕШтельшлм управ™ ЛЯЮЩИМ входом, к которому ПОДК71ЮЧеН датчик пульсаций выпрямленного тока.ВЫ ход второго сумматора может быть подключен к входу множащего устройства че pea сумматор, на другой вход которого подключен через фильтр выуцад датчика аапаса. Может быть дапользован также датчик углов опережегшя, подключенный своим выходом к BTiuoy третьего сумматора, выход которого подключен через второй блок умножешш к в коду нхль-органа, выход которого подключен к входу указанного усилительно-коммутирующего устройства. На второй вкод третьего суМ матора подключен через KocHiijCffijifl npeoCv разователь выход второго сумматора, вььход второго вадатямка постокипого напря жения подключен через четвертый сумма-тор, к другому входу которого подключен выход второго сумматора, к входу первого блока умножения, выход которого под клгочен на вход пятого сумматора, выход которого подключен череэ си5усный преобразователь и шестой сумматор к входу масш-табирукчгэго блока. Выход последнего черс; cen.btvjoi-cyMMarcpj на вг.од г.оторого подключен третий 3anaiv чик постоянного напряжешя, подключен к входу второго блока умяожешш, выход указанного гфеобразователя частоть в кв пряжетю подключен через блок делетет, на другой вход которого включен четверты задатчик постоянного Напряжения, к дам первого и третьего блоков умможеняя, Развертываюгци преобрааовате-чЬр к входам которого поаклкгтены вьпшды указанных датчтпса фазы ЭДС тт преобразователя ча« стоты в напряжение, подключен через второй косинусный преобразователь и восьмой сук матор к входу укэванкого -я ль-органа Второй задатчттк постоянного напряисегшя подключен через девятый сумматор, на Другой вход которого подключен выход рае вертывающего преобравователя, к входу третьего блока умножешта выход которого подключен через десятый сумматор и В1 орой синусный преобразователь к входу вось мого сумматора, а выход указанного дaт чика фазы пульсаций тока подключен к входам пятого и десятого сумматоров, Для повыи1ет1я точности в работе к уп равляющему входу масштабирующего пре- j образователя подключен выход датчика отношения амплитуды пульсаций вьп1рямленного тока к его среднему значет1Ю. На фиг, 1. пр-иведена структурная схема предложенного устройства; на фиг. 2 схема устройства с регулятором угла опережения К секциям вентильного двигателя подключен датчик 2 фазы ЭДС двигателя, вход преобразователя 3 частоты в напряжение и вход регулятора 4 угла опережения. Датчик 5 углов запаса, подключенный к вштильному двигателю 1, Подключен выходными зажимами к входам сумматора 6 и интегрирующего фильтра 7, К второму входу сумматора 6 подключен задат-чик 8 постоянного напряжения. Выходы сумматора 6 к фильтра 7 подключены к входам второго сумматора 0, выход которого подключен к входу множительного устройства 10. Датчик 11 фазы пульсаций выпрямленного тока подключен между вентильным двигателем 1 и входом регулятора угла опережения 4, Выход регулятора угла опережения 4 подключен к вентильному дбигателю 1 через усилительно-коммутирующее устройство 12. Вентильный двигатель состоит из собственно электртгче- ской машины 13, ведомого двигателем преобразователя 14, питающего трансформатора 15, выпрямителя 16 и сглажива1Ощего реактора 17. , ycrpdicrao снабжено датчиком 18 углов опережения, подключенным к входу третьего сумматора 19, вьпсод которого подключен через второй блок умножетгя 20 к входу нуль™оргаиа 21, вытсод которого подключен к входу усилитепьно-KON му-пфуюшего устройства 12. К второму входу третьего сумматора 1 9 подключен через коСянуснь й преобразователь 22 второго сумматора 9 Выход второго задатчнка 23 постоянного напряжения подгшючен через четвертый сумматор 24, к другому входу которого подключен выход второго сумматора 9, к Bxonj первого блока умножения 1О, выход которого подключен на вход пятого сумматора 25. Выход последнего подключен через синусный преобразователь 26 и шестой сумматор 27 к входу масштабирующего блока 28, выход которого через седьмой сумматор 29е на другой вход которого подключен третий задатчик ЗО постоянного напряжения, подключен к входу второго блока умножения 2О. Выход преобразова-теля 3 частоты в напряжение подключен через блок деления 31, на другой . вход I которого подключен четвертый аадатчик 32 постоянного напряжения, к входам первого и третьего блоков умножения (блоки 10 и 33 соответственно). Развертывающий преобразователь 34, к входам которого подключены выходы датчика 2 фазы ЭДС и преобраэоватапя частоты в напряже1гае 3, подключен через второй косинусный преобразователь 35 и восьмой сумматор 36 к входу нульу-органа 21. Второй задатчик 23 постоянного напряжешгя подключен через девятый сумматор 37, на другой ВХОД которого подключен выход развертывающего преобразователя 34 к входу третьего блока умножения 33, выход которого подключен через десятый сумматор. 38 и второй синуснь1й. преобразователь 39 к входу шестого сумматора 27. Датчик 40 отноиюиия амплитуды пульсаций выпрямленного тока к его среднему значению подключен между выходом Быпрямитсу1я 16 и входом масштабирующего блока 28. Устройство работает следующим образом Информация о фазе и частоте ЭДС вентильного Ш1иг 1тсля вводится с датчика 2фазы ЭДС двигателя в преобразователь 3частоты в напряжение и регулятор 4 угла оне 5ежения. 11|«{|ормация о мгновенной величине углов озапаса мащинпой ком изм, мутации вводится с датчика 5 углов запас на перв1лй сук1матор G и фильтр 7. Фильтр 7 усредняет это напряжение, вследствие чего (га его выходе напряжение пропориио- на;;ьно средней величине углов запаса О Первый сумматор 6 выделяет сигнал рассогласования между заданным и истинным значе1П1Ями углов погасания . изм. служат Задат 1иком величины зад. первый задатчик 8 постоянного напряжения На выходе второго сумматора 9 обрас ется сигнал 5 5 алгеб раической сумме среднего значе1гая угла запаса и сигнала рассогласования. Информация о фазе пульсации выпрямленного тока вентильного двигателя в регулятор угла опережения псхзтупает с датчике 11 фазы пульсации выпрямленного тока. Выходной сигнал регулятора угла опере жения поступает не управляющие электроды преобразователя вентильного двигателя через коммутирующе-усилительное устройство 12. Задавать угол опережения в функции фазы пульсации выпрямленного тока можно, например, в соответствии с уравна1инием со спедуюш1ш ypaBJieHHSvi: -Ссл5 С - tn(K(f -je)t) + + 5сяС(5), где и , , - средние величины углов ср ср запаса и опережения; /l/n - амплитуда сетевой пульсации тока; 7 - среднее значение выпрямленного - отношение частоты сетевой пульсации к частоте вращения двигателя CJ ; I - фаза сетевой пульсации тока в мо- мент, соответствующий началу ин- j верторной KOMNiyTaHHH (в эл. град, сети). На фиг. 2 показана схема устройства с регулятором угла опере/кеН1гя, поддерживающим угол запаса неизменным в соот ветствии с приведенным уравнением. Питание на вентильный двигатель 13 подается с трансформатора 15 через выпрямитель 16, реактор 17 и ведомый двигателем преобразователь 1 4. Исходная и1Е||ормаиия в устройство вводится с четырех измерительных датчиков 11 - фазы пульсаций выпpямJItэннoгo тока двигателя, 5 - углов запаса, 2 - фазы ЭДС двигателя и 18 - углов опережения. Дат чик 2 фазы ЭДС двигателя предст шляет собой блок HoporoDi.ix элементов. Выходной сигнал этого датчика, т. е. последовательность импульсов, совпадающих по фазе с переходами через нуль ЭДС двигателя, подается через преобразователь 3 частоты в напряжение на блок деления 31 и развертывающий преобразователь 34, представляющий собой устройство типа интегратора. Период работы преобразователя равен интервалу между началами смежных коммутаций, запуск его осуществляется от датчика 2 фазы ЭДС дв тгателя. Напряжение на выходе блока деления 31 пропорци- онально частному К 6i} / (jj от деления частоты сетевых пульсаций тока ц/ на частоту вращевгая двигателя (4) . Напряжение, пропорциональное частоте сетевь1Х пульсаций, формируется четвертым аадатчиком 32 постоянного напряжения. Величгша напряжения на выходе развертывающего преобразователя 34 пропорциональна фазе ЗДС двигателя (Ц и используется устройством управления как текущее значение угла опережения jS . Импульс управления формируется в момент, когда значение;8удовлетворяет приведенному уравнентпо. Выходное напряжение преобразователя 34 подается на второй косинусный преобразователь 35 и девять1й сумматор 37. Выходное напряжение cyM faTopa 37 пропорционально разнице ( (jOt ) меж / (соответ ду постоянной величиной ствующее напряжение формируется вторым задатчиком постоянного напряже1гая 23) и текущим значением угла опережения jS COti , Выходное сигнал второго сумматора 9, пропорпиональный О S-, ( Р р. используется устройством в качестве значений углов О и 5 , согласно приведен ному уравнению. Косинусный преобразователь 22 формирует из этого сигнала на- пряжение, г ропорпиональное вел1тчине СЛ5о Выходное нштряжение датчика углов опереже П1Я П зопорционально величине ., Датчик 11 фазы пуле саций выирик)ленно го тока представляет собой тргиюформатор тока с режекторным ljJИльтt.5oм, настсюепным на частоту пульсапи (л) и нагруженным, пороговый элемент, запускающий развертывающий преобразователь, аналопгчный преоб разователю 34, Розншк между этими преобразователями заключается в том, что в датчике 11 и 1тегрируется неизмешюе по вел тчине напряжешш и запуск его осушест вляется с пос роянной частотой (л) f2 (так как пул1: сации отсчитывается от нуля до 360 ). образом, вешпина пилообр,:к,хго напряжения на выходе блока 11 пропорциональна фазе сетевой пульсации. На выходе Bocbf.oro сумматора 36 фор- мтфуется Напряжение, пропорциональное левой части прпгведенного уравнетга/ С выход третьего сумматора 19 гш вход второго блока умножения 2О подается напряже1П1е, пропорциональное первому сомножителю при веденного уравне1гая. Четвертый ч пятый Сумматоры (блоки 24 и 25 соответственно и первый блок умножения Ю формируют ве лтпину К (/G -о ) + Г о Девятый,; деся тый сумматоры (блоки 37 и 38 соответственно) t третий блок умножения 33 формируют величину К(йГ/б - ) + f, Синусные преобразователи 26s 39 вычисляют синусы этих , С помощью шестого, седьмог сумматоров (блоки 27 и 29)s третьего за датчика постоянного напряжется ЗО и масштабирующего блока 28 вырабатывается напряжесгае на выходе сумматора 29, пропорциональное величине )-fr;|. 7О С Отношение J для применяем1 1х на электроподвижном составе конструкций реактора приблизительно постоянна. Бели эта велтр1инаизменяется, в схему вводят показа1П1ый штриховыми линиями датчик 4О отношения амплитуды пульсаций выпрямленного тока к его среднему значению, регулирующий коэффициеЕ1Т передачи блока 28. На входы нуль-органа 21 поступают напряжения: с восьмого сумматора 36, пропорциональное левой части приведенного уравнеЕшя, и пропорциоЕшльные его правой части - с блока умножения 2О, Когда разница между этими напряжениями становится меньше заданной, нуль-орган формирует управляющий сигнал для начала машинной коммутации. Этот сигнал подается на управляющие электроды вентиле преобразователя 14 через усилительно-коммутируюи1ее устройство 1 2. f 1риме(1ение в предложенном устройстве обратной связи по углу запаса и шертора в комбинации со слежением за фазой пульсации выпрямленного тока поддерж1шает Неизменным как среднее, так и мгновенное значения углов запаса. позволяет ма установленном силовом оборудовании получить около 15% прироста врашаюшего момента вентильного двигателя за счет луч- uiero использова ия его активных материалов. ормула изобретени 1, Устройство для управления машинной коммутацией вентильного двигателя, содержащее подключенный через усилительнокоммутирующий блок к управляющим электродам вентилей преобразователя регулятор угла опереже гия открытия вентилей, к управляющим входам которого подключен выход датчика фазы ЭДС двигателя и через блок умножения - выход сумматора, на вход которого подключены выходы задатчика величины углов запаса и датчик углов запаса, а выход датчика фазы ЭДС врашеиия подключен также к входу преобразователя частоты в напряже гае, выход которого подключен к входу множительного устройства и к управляющему входу регулятора угла опережения, отличающееся тем, что, с целью повышения энергетических показателей и увеличения вращающего момента двигателя за счет поддержания как среднего, так и мгновенных значений углов запаса на мшшмально возможном уровне, регулятор угла опережения снабжен дополнительным управляющим входом, к которому подключен датчик пульсаикй выпрямленного тока.
2. Устройство по п. 1,отличается тем, что оно снабжено вторым сумматором, выход первого сумматора подключен к входу множительного устройства через второй сук матор, на другой вход которого подключен через фильтр выход датчика углов запаса.
I Источники информации, принятые во вшьманве при экспертизе.
1.Авторское свидетельство СССР W. 307476, кл. Н 02К 7/62, 1969.
2.Авторское свидетельство по заявке Nb 1891 294/24-О7, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1981 |
|
SU995216A1 |
| Устройство для управления машинной коммутацией вентильного двигателя | 1973 |
|
SU702466A1 |
| Вентильный электродвигатель | 1983 |
|
SU1136267A1 |
| Адаптивный регулятор тока для управляемых вентильных преобразователей | 1990 |
|
SU1786627A1 |
| Вентильный двигатель | 1980 |
|
SU892594A1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД | 2002 |
|
RU2225067C1 |
| Вентильный электродвигатель | 1979 |
|
SU904135A1 |
| Устройство для определения углового положения ротора вентильного двигателя | 1981 |
|
SU1003261A1 |
| УПРАВЛЯЕМЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1994 |
|
RU2088041C1 |
| Тяговый электропривод переменного тока | 1985 |
|
SU1450064A1 |