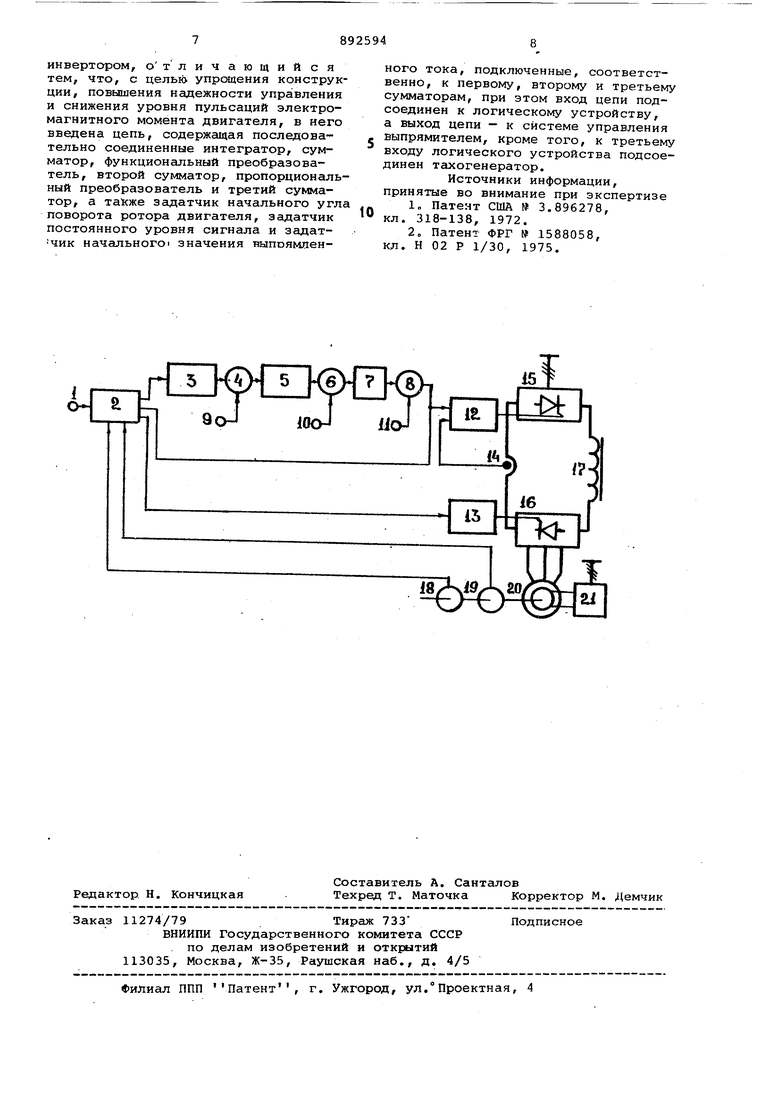
Изобретение относится к электрическим машинам и может быть испольэо вано для создания вентильных двигате лей с повышенной плавностью вращения Известно устройство для управления трехфазным вентильным двигателем содержащее синхронную мгииину, подклю ченную к тиристорному преобразователю, частоты со звеном постоянного тока, связанному с логическим управляющим устройством 1. Недоста.тком известного устройства являются значительные пульсации электромагнитного момента двигателя, возникающие при пуске и низких частотах его вращения, что снижает надежность и срок службы двигателя, а также ограничивает его применение для механизмов, требующих широкого диапазона регулирования скорости вра щения. Известен также вентильный двигатель, содержащий синхронную машину, подсоединенную к тиристорному преобразователю частоты со звеном постоянного тока, выпрямитель, инвертор систему управления выпрямителем, систему управления инвертором, датчик выпрямленного тока, датчик положения ротора, соединенный своим выходом с одним из входов логического устройства, второй .вход которого соединен с органом управления 2. Недостатком известного устройства является сложность конструкции его силовой части вклюЧаищей по меньшей мере два выпрямителя и два инвертора, входящих в состав тиристорного преобразователя частоты, и многообмоточный развязывающий трансформатор, что снижает надежность управления вентильным двигателем. Кроме того, высокий уровень гармонических электромагнитного момента двигателя, особенно при больших углах опережения управления инвертором, таИже снижает надежность управления двигателем. Цель изобретения - упрощение конструкции, повышение надежности управления и снижение уровня пульсаций электромагнитного момента вентикального двигателя.Поставленная цель достигается тем, что в устройство, содержащее синхронную машину, подключенную к тиристорному преобразователю частоты со звеном постоянного тока, содержащему выпрямитель, инвертор, систему управле ния выпрямителем, систему управления инвертором и датчик выпрямленного тока, а также датчик положения ротора, подсоединенный к одному из входов логического устройства, второй вход которого связан с органом управления, а а выходы - соответственно, с системой управления выпрямителем и с системой управления инвертором., введена цепь, содержащая последовательно соединенные интегратор, сумматор, функциональный преобразователь, второй сумматор, пропорциональный преобразователь и третий сумматор, а также задатчик начального угла поворота ротора двигателя, задатчик постоянного уровня сигнала и задатчик начального значения выпрямленного тока, подключенные, соответственно, к первому, второму и третьему сумматорам, при этом вход цепи подсоединен к логическому устройству, а выход цепи - к сие системе управления выпрямителем, кроме того, к третьему входу логического устройства подсоединен тахогенератор Включение в устройство указанной цепи позволит исключить из него дополнительные выпрямительные и инверторные агрегаты, используемые для уменьшения уровня пульсаций электромагнитного момента двигателя, что существенно упростит конструкцию силовой части вентильного двигателя и повысит надежность его управления. Модуляция с помсяцью названной цепи выпрямленного тока в звене постоянного тока преобразователя частоты, при пуске и низких частотах вращения дви гателя, обеспечит формирование электромагнитного момента с ограниченным до безопасных величин уровнем пульсаций . На чертеже представлена блок-схема устройства. Устройство содержит орган управле ния 1, связанный с входом логического устройства 2, выход которого подключен к цепи последовательно соединенных интегратора 3, сумматора 4, функционального преобразователя 5, сумматора 6, пропорционального преоб разователя 7 и сумматора 8, к вторым входам сумматоров 4, б и 8 подключен соответственно, задатчик 9 начально го угла поворота ротора , задатчик .10 постоянного уровня сигнала и задатчик 11 начального значения выпрям ленного тока, выход цепи подсоединен к системе 12 управления, связанной этим же входом с логическим устройством 2, к третьему выходу которого подсоединена система 13 управления . инвертором, датчик 14 выправленного тока, подключенный к второму входу систеки 12 управления выпрямителем, выпрямитель 15, инвертор 16, сглаживающий дроссель 17, датчик 18 положения ротора и тахогенератор 19, под соединенные к логическому устройству 2, а также синхронную мгшину (двигатель) 20 с системой воэбулодсния 21. Устройство работает следующим образом, При поступлении сигнала от органа управления 1 на вход логического устройства 2, выдается команда на пуск синхронного двигателя 20. Логическое устройство 2, через соответствующие выходы, вьщает команды на пуск выпрямителя 15, системе 12, управления, и на частоту коммутации вентилей инвертора 16, системе 1,3 управления. Частота коммутации определяется датчиком 18 положения ротора, связанным с валом двигателя 2,0. В результате взаимодействия тока, протекающего по секциям якорной обмотки, коммутируемых инвертором 16, с полем возбуждения, создаваемым системой возбуждения 21, ротор двигателя 20 приходит во вращение. При пуске и низких частотах вращения двигателя (меньше 0,1 синхронной) ЭДС мащины недостаточна для производства естественной коммутации вентилей инвертора. Поэтому с помощью устройства 2 производится их искусственная коммутация за счет прерывания тока выпрямителя 16, путем кратковременного перевода его в инверторный режим, через Кс1ждые 60 эл. градусов поворота ротора двигателя 20, Развиваемый двигателем электромагнитный момент является функцией выпрямленного тока Ij, протекающего в секциях якорной обмотки двигателя, угла опережения управления инвертором fb, ЭДС (Е) , наводимой в якоре при вращении возбужденного ротора и угла поворота Y между коммутируемой секцией и обмоткой возбуждения двигателя:Мэ ф ( В первом приближении выражение электромагнитного момента двигателя, без учета влияния реакции якоря, запишется следуквдим образом: Мд Kj,(v -Ч ) , (2) где К. Е/1)Уд - коэффициент ЭДС двига. теля; (slf)- синхронная частота . вращения ротора; ft - начальный угол поворо та ротора; m - число фаз инвертора. Такая зависимость приводит к тому, что в кривой момента кроме постоянной составляющей присутствует и переменная составляющая, вызывающая пульсации момента. Для снижения уровня пульсаций момента выбран алгоритм управления, .позволяквдий формировать кривую электромагнитного момента путем модуляции выпрямленного тока: .1 (v),I +& l-cos (v-{) , (3) где Ij - начальное значение выпря ленного тока, выбирается из условия оОеспечения т кой же работоспособности двигателя, как и при немодулкрозанном выпрямлен ном TOfce; - глубина модуляции выпря мленного тока, определяет исходя из требований к до пустимому уровню пульсаций момента. Для реализации заданного алгоритма управления в устройство введена цепь из последовательно соединенных интегратора 3, сумматора 4, функционального преобразователя 5, сумматора 6, пропорционального преобразова теля 7 и сумматора 8, а также задат чики начального угла поворота ротора 9, постоянного уровня сигнала 10 и начального значения выпрямленного тока 11, соединенные, соответственно, с вторыми входами сумматоров 4, 6 и 8. Кроме того, в устройство введен тахогенератор 19. После команды на пуск двигателя и начала его разворота, информация о частоте вращения ротора передается о от тахогенератора 19 в логическое устройство 2 и оттуда поступает в ин тегратор .3. Выход логического устройства 2, связанный с системой упранления выпрямителем 12 после пода - команды на пуск, отключается. Интегратор 3 выдает сумматору 4 сигнал пропорциональный текущему значению угла поворота ротора v. На второй вход cyMiviaTOpa 4 поступает сигнал от задатчика 9 начального угла поворота ротора Ч . Полученный сум марный сигнал вводится в функциональ ный преобразователь 5, где ок модулируется косинусоидалькой функцией, С выхода преобразователя 5 сигнал поступает на один из входов сумматора б, на второй вход которого подается сигнал от задатчика 10 постоянного уровня сигнала, пропорционального условной единице. После сравнения сигнал- поступает в пропорциональ ный преобразователь 7, в котором он корректируется в соответствии с выбранной глубиной модуляции 8. Дальше сигнал подается на вход 8, где суммируется с сигналом, поступающим от задатчика 11 начального значения выпрямленного тока 1 и поступает на вход системы 12 управления выпрямите лел1. Выпрямленный ток,модулируемый выпрямителем 15 в соответствии с алгоритмом управления, формирует криву электромагнитного момента двигателя, которая описывается выражением; Мд Kg l -fg l-cos{v-)j cos() ( Уровень пульсаций результирующей кривой электромагнитного момента регулируется в соответствии с требованиями к допустимому уровню пульсаций путем выбора начального значения выпрямленного тока и глубины его модуляции . После каждого поворота ротора двигателя 20 на 60 эл. градусов (при m б) по команде, поступающей от .датчика tS положения ротора, логическое устройство 2 производит перевод интегратора 3 в исходное {нулевое) состояние и цикл повторяется. При достижении двигателем 20 частоты вра1цения превышающей 0,1 синхронной, контролируемой тахогенератором 19, логическое устройство 2 переводит инвертор 16 в режим естественной коммутации, вход интегратора 3 отключается, а система управления выпрямителем 12 подключается непосредственно к устройству 2. Вентильный двигатель работает в режиме ес тественной коммутации. При снижении частоты вращения двигателя ниже 0,1 синхронной, к выходу логического устройства 2 подключается интегратор 3, а система 12 управления отсоединяется от устройства 2, Инвертор переводится в режим искусственной коммутации. Система управления работает аналогично описанному выше. Предлагаемое устройство, по сравнению с известным, имеет более простую и надежную конструкцию силовой части, а, следовательно, имеет меньш: ю стоимость и обладает большей надежностью управления. Снижение уровня пульсаций электромагнитного момента двигателя при пуске и работе его с низкими частотами вращения способствует расширению области применения вентильных двигателей, в частности, применение их- вместо машин постоянного тока, имеющих большую стоимость и меньшую надежность управлеиия, для механизмов с частыг-ш пусками и с широким диапазоном регулирования скорости. Формула изобретения Вентильный двигатель, содерАсаадий синхронную машину, подключенную к тиристорному преобразователю частоты со звеном постоянного тока, содержащему выпрямитель, инвертор, систему управления выпрямителем, систему управления инвертором и датчик выпрямленного тока, а также датчик положения ротора, подсоединенный к одному из входов лoгичedкoгo устройства, второй вход которого связан с органом управления, а выходы - соответственно с системой управления выпрямителем и- с системой управления
инвертором, отличающийся тем, что, с целью упрслцения конструкции, повышения надежности управления и снижения уровня пульсаций электромагнитного момента двигателя, в него введена цепь, содержащая последовательно соединенные интегратор, сумматор, функциональный преобразователь, второй сумматор, пропорциональный преобразователь и третий сумматор, а также задатчик начального угла поворота ротора двигателя, задатчик постоянного уровня сигнала и задатчик начального значения выпоямпенного тока, подключенные, соответственно, к первому, второму и третьему сумматорам, при этом вход цепи подсоединен к логическому устройству, а выход цепи - к системе управления выпрямителем, кроме того, к третьему входу логического устройства подсоединен тахогенератор.
Источники информации, принятые во внимание при экспертизе
1„ Патент США № 3.896278, кл. 318-138, 1972.
2с Патент ФРГ № 1588058, кл. Н 02 Р 1/30, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1979 |
|
SU904135A1 |
| Вентильный электродвигатель | 1981 |
|
SU995216A1 |
| Вентильный электродвигатель | 1986 |
|
SU1374391A1 |
| Вентильный электродвигатель | 1983 |
|
SU1136267A1 |
| Устройство для определения углового положения ротора вентильного двигателя | 1981 |
|
SU1003261A1 |
| Двухзонный вентильный электродвигатель | 1978 |
|
SU782069A1 |
| Способ точной автоматической синхронизации синхронного двигателя, питаемого от преобразователя частоты с инвертором тока, с сетью переменного тока промышленной частоты | 1990 |
|
SU1744755A1 |
| Вентильный электродвигатель | 1986 |
|
SU1390763A1 |
| Способ управления вентильным электродвигателем со звеном постоянного тока при изменении знака его момента и устройство для его осуществления | 1983 |
|
SU1124408A1 |
| Вентильный электродвигатель | 1986 |
|
SU1379931A1 |
I-Д /
