Изобретение относится к построению систем управления вентильно-индукторными электроприводами (ВИП) различных механизмов, в том числе малых транспортных средств, насосных установок, бытовой техники и др.
Известен вентильно-индукторный электропривод, содержащий последовательно включенные пропорционально-интегральный (ПИ) регулятор частоты вращения, регулятор тока, блок ограничения, выход которого подключен к входу изменения скважности широтно-импульсного модулятора (ШИМ), и силовой преобразователь, к выходу которого подключен электродвигатель, при этом к входу регулятора частоты вращения через сумматор подключены задатчик и датчик частоты вращения, на валу электродвигателя установлен датчик положения ротора, соединенный своими выходами с входами управления коммутацией фаз силового преобразователя [1]. В этой структуре используется общепринятая концепция подчиненного регулирования параметров и содержится внутренний регулятор тока, выход которого воздействует на вход задания скважности модуля ШИМ.
В этой структуре на низких скоростях (в режиме токоограничения) производится одновременное изменение углов включения и отключения фазы в функции скорости, а при высоких скоростях в функции ошибки по частоте вращения.
Недостатком этого решения является то, что для определения оптимальных законов изменения углов включения и отключения предполагается проведение серии динамометрических тестов на реальном объекте или математического моделирования работы электропривода.
Ближайшим к предложенному по решаемой задаче является вентильно-индукторный электропривод, содержащий последовательно включенные задатчик частоты вращения, пропорционально-интегральный (ПИ) регулятор частоты вращения, регулятор тока и силовой преобразователь, к выходу которого подключены фазные обмотки электродвигателя, а также коммутатор фаз, входы которого подключены к выходам регулятора угла включения и задатчика угла отключения фаз, а выходы - к входам управления углами коммутации фаз силового преобразователя, установленные на валу электродвигателя датчик частоты вращения и датчик положения ротора, соединенный своими выходами с третьим входом коммутатора фаз, при этом ко второму входу регулятора тока подключен датчик тока, второй вход регулятора угла включения фаз и второй вход регулятора частоты вращения соединены с выходом датчика частоты вращения, а вход регулятора угла включения фаз подключен к выходу регулятора частоты вращения [2].
В этой структуре могут быть сформированы механические характеристики, имеющие жесткий участок, участок постоянства мощности и участок постоянства момента. Для реализации таких характеристик требуется информация о значениях токов в каждой фазе двигателя, т.е. наличие датчиков тока в каждой фазе и регулятор тока.
Недостатком такого решения является наличие датчиков тока в каждой фазе, усложняющих электропривод. Поскольку число фаз обмотки двигателя в вентильно-индукторном электроприводе может быть значительным, то при существенной стоимости датчиков тока с гальванической развязкой это еще и удорожает электропривод.
Техническая задача, решаемая предлагаемым устройством, состоит в упрощении и удешевлении электропривода за счет исключения датчиков и регулятора тока.
Поставленная задача решается тем, что в вентильно-индукторный электропривод, содержащий последовательно включенные задатчик и регулятор частоты вращения, силовой преобразователь, к выходу которого подключены фазные обмотки электродвигателя, коммутатор фаз, входы которого подключены к выходам регулятора угла включения и задатчика угла отключения фаз, а выходы соединены с входами управления углами коммутации фаз силового преобразователя, установленные на валу электродвигателя датчик частоты вращения и датчик положения ротора, выход первого из которых соединен с вторым входом регулятора частоты вращения, а выход второго - с третьим входом коммутатора фаз, при этом вход регулятора угла включения подключен к выходу регулятора частоты вращения, дополнительно введены блок умножения на постоянный коэффициент и последовательная цепь из пропорционального усилителя с ограничением выходного сигнала, блока перемножения и сумматора, а регулятор угла включения фаз содержит задатчик постоянного угла включения, последовательно соединенные усилитель, нелинейный элемент с двумя уровнями ограничения выходного сигнала и блок вычитания, к второму входу которого подключен выход задатчика постоянного угла включения, при этом входы пропорционального усилителя с ограничением выходного сигнала и блока умножения на постоянный коэффициент соединены с выходом регулятора частоты вращения, ко второму входу сумматора подключен выход блока умножения на постоянный коэффициент, второй вход блока перемножения соединен с выходом датчика частоты вращения, а выход сумматора подключен к входу управления напряжением силового преобразователя.
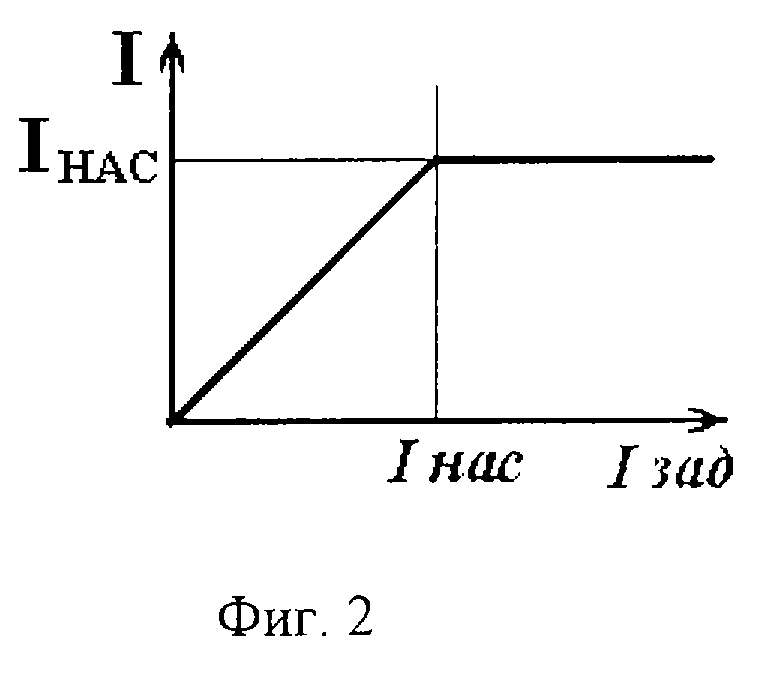
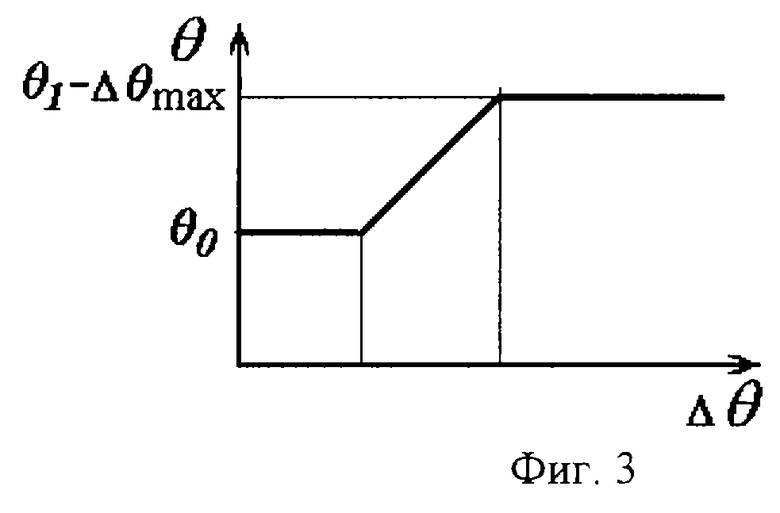
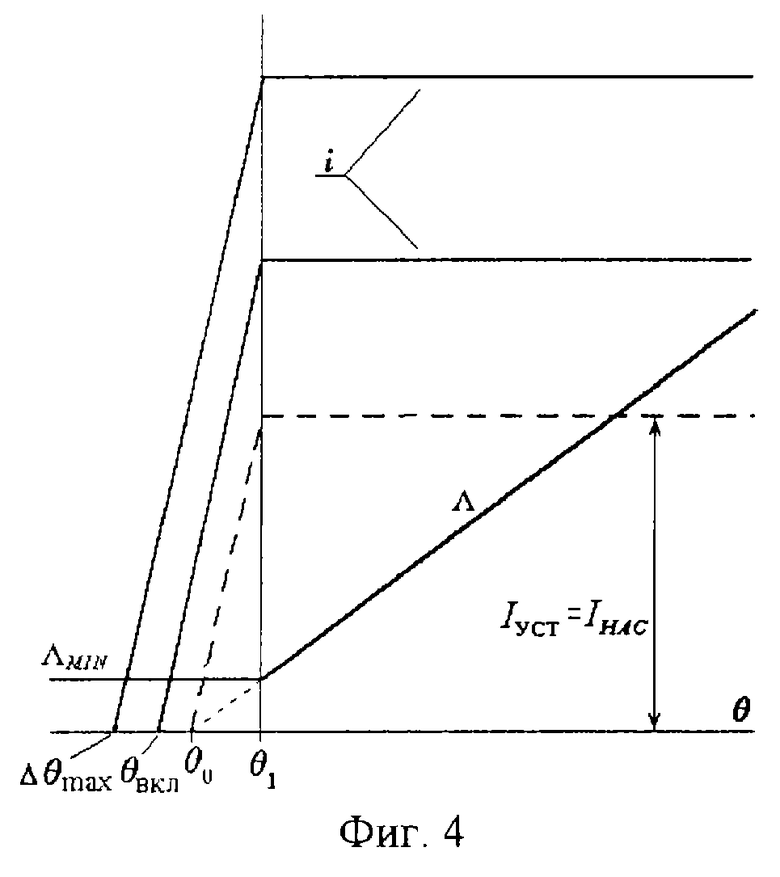
Устройство поясняется чертежами, где на фиг.1 изображена схема электропривода; на фиг. 2 и 3 - соответственно характеристика пропорционального усилителя с ограничением выходного сигнала и характеристика нелинейного элемента с двумя уровнями ограничения выходного сигнала; на фиг.4 - кривые тока и магнитной проводимости в функции угла поворота ротора.
Вентильно-индукторный электропривод (фиг. 1) содержит последовательно включенные задатчик 1 и регулятор 2 частоты вращения, силовой преобразователь 3, к выходу которого подключены фазные обмотки электродвигателя 4, коммутатор 5 фаз, входы которого подключены к выходам регулятора 6 угла включения и задатчика 7 угла отключения фаз, а выходы соединены с входами коммутации фаз силового преобразователя 3, установленные на валу электродвигателя датчик 8 частоты вращения и датчик 9 положения ротора, выход первого из которых соединен с вторым входом регулятора 2 частоты вращения, а выход второго - с третьим входом коммутатора 5 фаз, при этом вход регулятора 6 угла включения фаз подключен к выходу регулятора 2 частоты вращения. Электропривод также содержит блок 10 умножения на постоянный коэффициент и последовательную цепь из пропорционального усилителя 11 с ограничением выходного сигнала, блока 12 перемножения и сумматора 13, а регулятор 6 угла включения содержит задатчик 14 постоянного угла включения, последовательно соединенные второй пропорциональный усилитель 15, нелинейный элемент 16 с двумя уровнями ограничения выходного сигнала и блок 17 вычитания, ко второму входу которого подключен выход задатчика 14 постоянного угла включения, при этом входы пропорционального усилителя 11 с ограничением выходного сигнала и блока 10 умножения на постоянный коэффициент соединены с выходом регулятора 2 частоты вращения, ко второму входу сумматора 13 подключен выход блока 10 умножения на постоянный коэффициент, второй вход блока 12 перемножения соединен с выходом датчика 8 частоты вращения, а выход сумматора 13 подключен к входу управления напряжением силового преобразователя 3.
Согласно характеристике пропорционального усилителя 11 с ограничением выходного сигнала, показанной на фиг.2, выходной сигнал усилителя сначала линейно нарастает, а при достижении выходным сигналом регулятора частоты вращения значения Iнас становится постоянным.
Характеристика нелинейного элемента 16 (фиг.3) имеет два уровня ограничения, меньший из которых определяет минимальное значение выходного сигнала, ограничивающее максимум угла включения, а больший - максимальное, ограничивающее минимальное значения угла включения по условиям устойчивой коммутации.
На фиг.4 показаны аппроксимированные кривые тока i в фазах двигателя при разных углах включения вентилей и характер изменения магнитной проводимости Λ при изменении углового положения ротора относительно статора.
В случае реализации системы управления электроприводом на аналоговых элементах возможно следующее выполнение узлов системы управления [3].
Блок 10 умножения на постоянный коэффициент может быть выполнен в виде операционного усилителя, коэффициент передачи которого определяется коэффициентом, на который и нужно умножить входной сигнал блока. Один из возможных вариантов выполнения этого блока показан, например, на стр.108. Аналогично может быть выполнен и блок перемножения 12.
Возможные варианты выполнения пропорционального усилителя 11 с ограничением выходного сигнала и нелинейного элемента 16 с двумя уровнями ограничения показаны на стр. 134.
Однако выполнение системы управления электроприводом на аналоговых элементах на данном этапе развития этой отрасли нецелесообразно, поскольку они не могут обеспечить требуемого быстродействия. Современный уровень развития элементной базы электропривода позволяет реализовать всю систему управления на базе микропроцессорной техники, т.е. с использованием микроконтроллера, при этом все упомянутые узлы могут быть реализованы программно.
Работает электропривод следующим образом.
Вентильно-индукторный электропривод имеет два канала управления: посредством регулирования напряжения на выходе силового преобразователя 3 и изменения угла включения вентилей инвертора силового преобразователя. Если силовой преобразователь выполнен со звеном постоянного тока, т.е. содержит выпрямитель и инвертор, и выпрямитель выполнен управляемым, то регулирование напряжения может обеспечиваться изменением напряжения на его выходе. При выполнении выпрямителя неуправляемым регулирование напряжения на выходе силового преобразователя может осуществляться изменением скважности широтно-импульсного модулятора, управляющего инвертором.
При подаче на вход регулятора 2 частоты вращения сигнала задания ωзад на его выходе появляется сигнал заданного значения тока и, соответственно появляется сигнал на входе регулирования напряжения силового преобразователя 3. На линейном участке кривой намагничивания электродвигателя величина напряжения на его входе определяется уставкой задания тока. На фазные обмотки электродвигателя поочередно подаются импульсы напряжения, вызывающие протекание тока в них.
При малых значениях выходного сигнала регулятора частоты вращения и, следовательно, малых значениях заданного тока усилитель работает на линейной части характеристики. До достижения током Iзад значения Iнас, определяемого уровнем ограничения усилителя 11, управление электродвигателем осуществляется только по каналу изменения напряжения на выходе преобразователя 3. Это обеспечивается за счет соответствующей характеристики нелинейного элемента 16, т.е. при работе усилителя 11 на линейном участке характеристики на выходе нелинейного элемента 16 имеет место постоянный сигнал. Сигнал на выходе регулятора 6 угла включения остается также постоянным.
Для стабилизации динамических свойств замкнутого контура частоты вращения, а также для получения режима ограничения тока (вертикального участка механической характеристики) система электропривода должна обеспечивать соблюдение закона Е/ω=const, где Е - сигнал на выходе блока 12 перемножения. Это обеспечивается введением сигнала по частоте вращения на второй вход блока 12 перемножения. При этом сигнал на соответствующем входе сумматора 13 пропорционален значению ЭДС двигателя. Сигнал, подаваемый на второй вход этого сумматора через блок 10 умножения на постоянный коэффициент, обеспечивает так называемую iR-компенсацию. В результате входной сигнал преобразователя 3 определяет заданное значение напряжения на его выходе.
Параллельно с изменением заданного значения напряжения на входе регулирования напряжения силового преобразователя 3 сигнал заданного значения тока поступает и на вход пропорционального усилителя 15, входящего в состав регулятора 6 угла включения. Как уже указывалось, при этом сигнал на выходе нелинейного элемента 16 остается постоянным. При достижении током Iзад значения Iнас усилитель 11 начинает выдавать постоянный по уровню сигнал, а на выходе нелинейного элемента 16 сигнал θ начинает изменяться по линейному закону вместе с ростом Iзад. Это приводит к тому, что напряжение на 7 выходе силового преобразователя 3, до этого регулируемое в функции Iзад, теперь остается постоянным, а разность сигнала θ1 с задатчика 14 постоянного угла включения и сигнала Δθвкл с выхода усилителя 16 (фиг.4), т.е. сигнал на выходе блока вычитания 17 уменьшается. Уменьшение угла включения (его смещение в сторону опережения относительно согласованного положения) приводит к более раннему включению ключевого элемента силового преобразователя 3 и соответственно увеличению амплитудного и среднего значения тока и увеличению среднего значения развиваемого двигателем момента.
Угол выключения при этом может оставаться постоянным и определяется задатчиком 7 угла отключения.
При дальнейшем увеличении заданного значения тока сигнал Δθ на входе нелинейного элемента 16 достигает значения, при котором его выходной сигнал достигает уровня ограничения и становится постоянным. Это ограничение связано с необходимостью ограничения смещения угла включения в сторону опережения по условиям обеспечения устойчивой коммутации.
Значение коэффициента, на который умножается входной сигнал пропорционального усилителя 15, зависит от параметров электродвигателя и определяется как
Iнас•dΛ/dθ,
где Λ - магнитная проводимость фазы;
Iнас - значение тока, определяемое по кривой намагничивания электродвигателя, соответствующее значению потокосцепления, при котором электродвигатель начинает работать в зоне насыщения.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1. Miller T. J.E. Switched Reluctance Drive and Their Control. Oxford: Magna Physics Publishing and Clarendon Press, 1993, с.106.
2. Implementation of a Current Controlled Switched Reluctance Motor Drive Using TMS320F240 Application Report: SPRA282. Texas Instruments Incorporated, 1998, p.16 (прототип).
3. Ялышев А. У., Разоренов О.И. Многофункциональные аналоговые регулирующие устройства автоматики. - М.: Машиностроение, 1981, с.107-108, 134.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД С ЭКСТРЕМАЛЬНЫМ РЕЖИМОМ РАБОТЫ | 2013 |
|
RU2540319C2 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНО-ИНДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2182743C1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД | 2003 |
|
RU2265950C2 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЕНТИЛЬНО-ИНДУКТОРНОЙ МАШИНОЙ | 2003 |
|
RU2242837C1 |
| Способ управления электроприводом постоянного тока механизма с пульсирующей нагрузккой на валу и устройство для его реализации | 1979 |
|
SU855909A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод постоянного тока | 1977 |
|
SU692044A1 |
| Асинхронный электропривод | 1990 |
|
SU1767690A1 |
| Частотно-регулируемый электропривод | 1989 |
|
SU1798884A1 |
Изобретение относится к области электротехники и может быть использовано в регулируемых электроприводах различных механизмов, в том числе малых транспортных средств, насосных установок, бытовой техники и др. Техническим результатом является получение механических характеристик вентильно-индукторного электропривода с постоянством момента без обратной связи по току, т. е. упрощение электропривода за счет исключения контура тока. Вентильно-индукторный электропривод содержит контур регулирования частоты вращения, силовой преобразователь, к выходу которого подключены фазные обмотки электродвигателя, коммутатор фаз, входы которого подключены к выходам регулятора угла включения и задатчика угла отключения фаз, а выходы соединены с входами коммутации фаз силового преобразователя, установленные на валу электродвигателя датчик частоты вращения и датчик положения ротора, выход второго из которых подключен к третьему входу коммутатора фаз. В электропривод введены блок умножения на постоянный коэффициент и последовательная цепь из пропорционального усилителя с ограничением выходного сигнала, блока перемножения и сумматора, при этом входы пропорционального усилителя с ограничением выходного сигнала и блока умножения на постоянный коэффициент соединены с выходом регулятора частоты вращения, ко второму входу сумматора подключен выход блока умножения на постоянный коэффициент, второй вход блока перемножения соединен с выходом датчика частоты вращения, а выход сумматора подключен к входу управления напряжением силового преобразователя. 4 ил.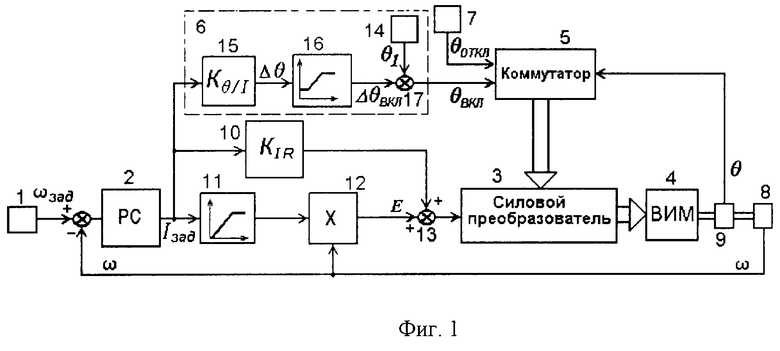
Вентильно-индукторный электропривод, содержащий последовательно включенные задатчик и регулятор частоты вращения, силовой преобразователь, к выходу которого подключены фазные обмотки электродвигателя, коммутатор фаз, входы которого подключены к выходам регулятора угла включения и задатчика угла отключения фаз, а выходы соединены с входами управления углами коммутации фаз силового преобразователя, установленные на валу электродвигателя датчик частоты вращения и датчик положения ротора, выход первого из которых соединен с вторым входом регулятора частоты вращения, а выход второго - с третьим входом коммутатора фаз, при этом вход регулятора угла включения подключен к выходу регулятора частоты вращения, отличающийся тем, что в него дополнительно введены блок умножения на постоянный коэффициент и последовательная цепь из пропорционального усилителя с ограничением выходного сигнала, блока перемножения и сумматора, а регулятор угла включения содержит задатчик постоянного угла включения, последовательно соединенные усилитель, нелинейный элемент с двумя уровнями ограничения выходного сигнала и блок вычитания, к второму входу которого подключен выход задатчика постоянного угла включения, при этом входы пропорционального усилителя с ограничением выходного сигнала и блока умножения на постоянный коэффициент соединены с выходом регулятора частоты вращения, ко второму входу сумматора подключен выход блока умножения на постоянный коэффициент, второй вход блока перемножения соединен с выходом датчика частоты вращения, а выход сумматора подключен к входу управления напряжением силового преобразователя.
| Прибор для подогрева воздуха отработавшими газам и двигателя | 1921 |
|
SU320A1 |
| - Texas Instruments Incorporated, 1998, p.16 (прототип) | |||
| СПОСОБ УПРАВЛЕНИЯ ОДНОФАЗНЫМ ИНДУКТОРНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ СО СТАРТОВЫМИ ПОЛЮСАМИ (ВАРИАНТЫ) | 1994 |
|
RU2091977C1 |
| Видоизменение устройства для освещения и окрашивания мениска в водомерных стеклах паровых котлов и баков | 1928 |
|
SU17245A1 |
| Вентильный электропривод | 1987 |
|
SU1522371A1 |
| US 4616165 A, 07.10.1986 | |||
| US 5015939 A, 12.02.1992 | |||
| DE 3826892 A2, 16.02.1989 | |||
| DE 4012561 A1, 24.10.1991 | |||
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
| ДВУХПОЯСНАЯ БАЙТОВАЯ СИСТЕМА | 1972 |
|
SU436138A1 |

