Предметом предлагаемого изобретения является система для авюматического слежения управляемой оси (например, оси орудия) зй п ерамещением це-ди, т. е. для навйдения этой дели на источник прямых нл.и отраженных сигналов (звуковых, световых или радио), для чего в системе используются, как .и в других уже известных аналогичных с,11С1емах, распределители, вр-ащающиеся синхронно с приамником поступающих от прямых или отраженных сигна.юв.
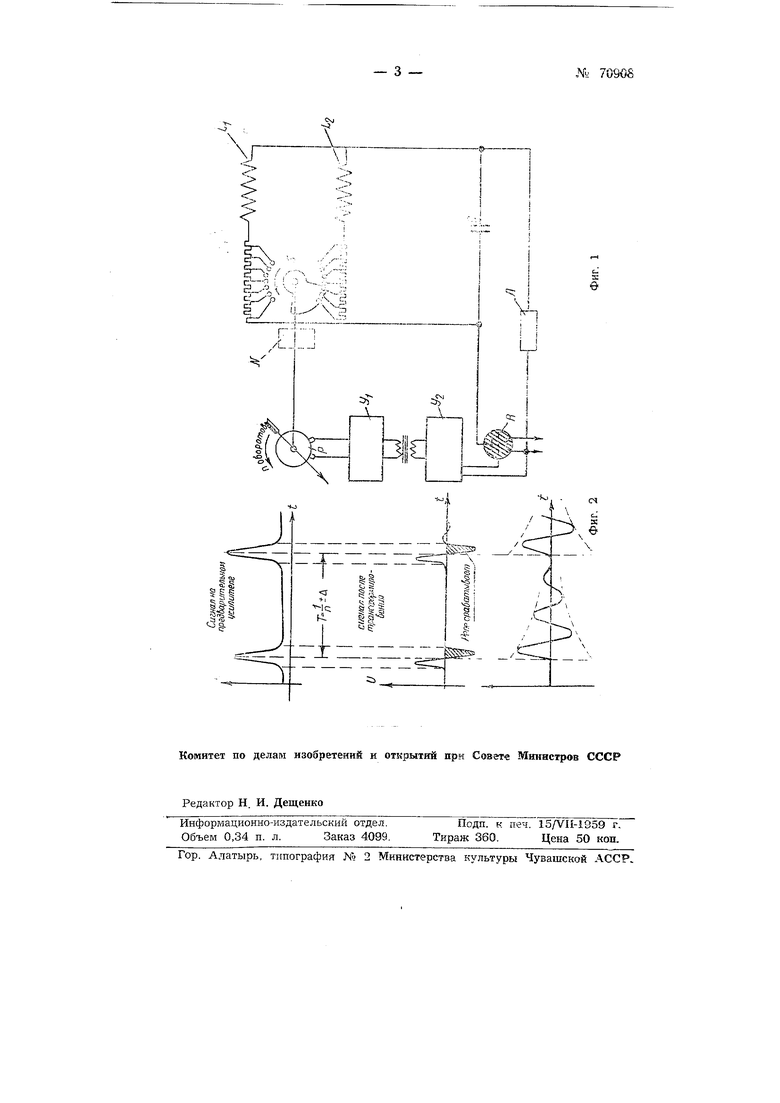
Согласно изобретению в такой системе в цепи дифференци.ального со.ченоида, управляющего поворотом оси орудия, включены реостаты, секции которых включаются и выключаются распределителями в зависимости от фазы максимального сигналаНа фиг. 1 изображена нрннципиальная электрическая схема предлагаемой системы; на фиг. 2--кривые тока и напряжения поступающего в систему сигнала.
Как уже указывалось выше, поворот уп эавляемой оси в нап)1авлении источника сигналов (в одной плоскости) осуществляется дифференциальным соленоидом , воздействующим на какой-либо сервомеханизм (н-апример, на плунжер гндросистемы, посредством насоса с электромагнитным упр.авлением). Режим тока в обмотках соленои;да регулируется включенными последовательно с этим« обмотками реостатами, управляемы1ми вращающимся распределителем. Рабочий ток подается короткими импу.чьса.ми через ионное реле. Сопротивления реостатов изменяются циклически сектором S распределителя, причем этот последний вращается синхронно с приемников Р сигналов (микрофон, фотоэлемент или ччитенца), который дол.жен обладать направленной характеристикой приема, что на чертеже символически ноказапо стрелкой. Пр|Ивод на фиг. 1 обозначен буквой jV. Принятый сигнал усиливается усилителем У и, если это необходимо, детектируется, а Затем через тр|ансформ1атор и второй усилите.пь У подается па управляемое им ионпое реле R, питаЮ1цее обмотки дифЛЬ 70908
ференциального соленоида. Питание на обмотки со.теиоида подается в те моменты, когда их режимы падготовлены соответствующим образом распределителем. Источник питания обозначен буквой А. Ниже рассдФатривается в качестве пр.имера работа системы в предположении, что она применяется для пилотирования снаряда на звучащую цель. В те моменты, когда вращающийся микрофон будет направлен на цель, э.д.с. (или ток) в нам образует скачок. В это время на трансформаторе индуктируется.единичное электрическое колебание (см. фиг. 2), при втором полупериоде которого замыкается ионное реле. Так как это произойдет в начале «спада сигнала, то тем оа1мы.м возможно наиболее точно отметить направление на цель. Ионное реле подаст ток на обмотки солеоида, распределение же тока в них будет зависеть от расположения (в данный момент) сектора 5 распределителя, который, как уже упоминалось выще, вpaщiaeтcя синхронно с микрофоном, И1.мея относительно него постоянный фазовый адвиг.
Если, например, цель сдвинута вправо относительно оси снаряда, то в тот момент, :когда микрофон -будет направлен на цель, сектор распределителя замкнет часть сопротивлени1т верхнего реостата, и по соответствующей Обмотке соленоида пройдет больший ток, а следовательно, сервомеханизм повернет ось снаряда направоКонденсатор С образует с обмотками соленоида колебательные контуры. Это смягчает работу соленоида и усиливает эффект его дифференциального действия {благодаря изменению декремента зату.хания, связанного с изменением еонротивлений реостатов.
П р с л (М е т и 3 о б р е т е и и я
Система для автоматического слежения управляемой оги (напри1мер, оси орудия) за перемещением цели с применением распределителей, синхронно вращ.аюЩИхся с приемником отраженных или прямых сигналов, поступающих от цели, отличающаяся тем, что в цепи дифференциального соленоида, управляющего поворотом оси орудия, включены реостаты, секции которых включ-аются и выключаются распределителями в зависимости от фазы максимального сигнала.