(54) АВТОМАТИЧЕСКИЙ СОРТИРОВАТЕЛЬ ПЛОДОВ ПО ЦВЕТУ

| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для сортировки плодов и овощей | 1980 |
|
SU939137A1 |
| ФОТОЭЛЕКТРИЧЕСКИЙ СПОСОБ СОРТИРОВКИ ПЛОДОВИ ОВОЩЕЙ ПО ЦВЕТУ | 1972 |
|
SU418773A1 |
| Способ сортировки предметов по цвету | 1978 |
|
SU814490A1 |
| Устройство для сортировки плодов и овощей по цвету | 1972 |
|
SU438448A1 |
| Устройство для сортировки плодов и овощей по цвету | 1977 |
|
SU624664A1 |
| Способ сортировки каракулевых шкурок | 1990 |
|
SU1755957A2 |
| Устройство для фотометрической сортировки слюды | 1980 |
|
SU948456A1 |
| СПОСОБ СОРТИРОВАНИЯ ПЛОДОВ И ОВОЩЕЙПО ЦВЕТУ | 1972 |
|
SU423525A1 |
| Способ сортировки предметов по внешним параметрам | 1978 |
|
SU776664A1 |
| Способ оптической сортировки плодов по качеству | 1979 |
|
SU820038A1 |
1
Изобретение относится к области техники сельскохозяйственного производства и предназначено для сортировки плодов, например, на фракции по спелости при машинной уборке с использованием различия их цвета.
Известен автоматический сортирователь плодов по цвету, содержащий транспортер фракций и фотометрическую камеру, на которой расположены оптические приемники и осветители 1.
Однако это устройство имеет низкую точность сортировки, вызванную колебанием размера плодов и изменением цвета транспортера из-за загрязнения в процессе работы самими плодами.
Наиболее близким по технической сущности к предложенному является автоматический сортирователь плодов по цвету, содержащий фотометрическую камеру со входом и выходом для плодов, источники света и расположенные на внешней поверхности фотометрической камеры фотоприемники
с пересекающимися оптическими осями в центре плода 2.
Однако для этого устройства характерна зависимость выходного сигнала от размера плодов одинаковой спелости, что приводит к низкой точности сортирования.
Цель изобретения - повыщение точности сортировки плодов независимо от их размеров.
Это достигается тем, что в известный автоматический сортирователь плодов по цвету дополнительно введены кольцевые отражатели, расположенные вдоль оптической оси так, что углы между фотоприемниками и плоскостями кольцевых отражателей равны углам между источниками света и плоскостями кольцевых отражателей.
Такое выполнение устройства обеспечивает сохранение неизменной площади светового пятна на плодах всех размеров и тем самым исключает влияние размеров плодов на величину фототока, что приводит к повышению точности сортировки.
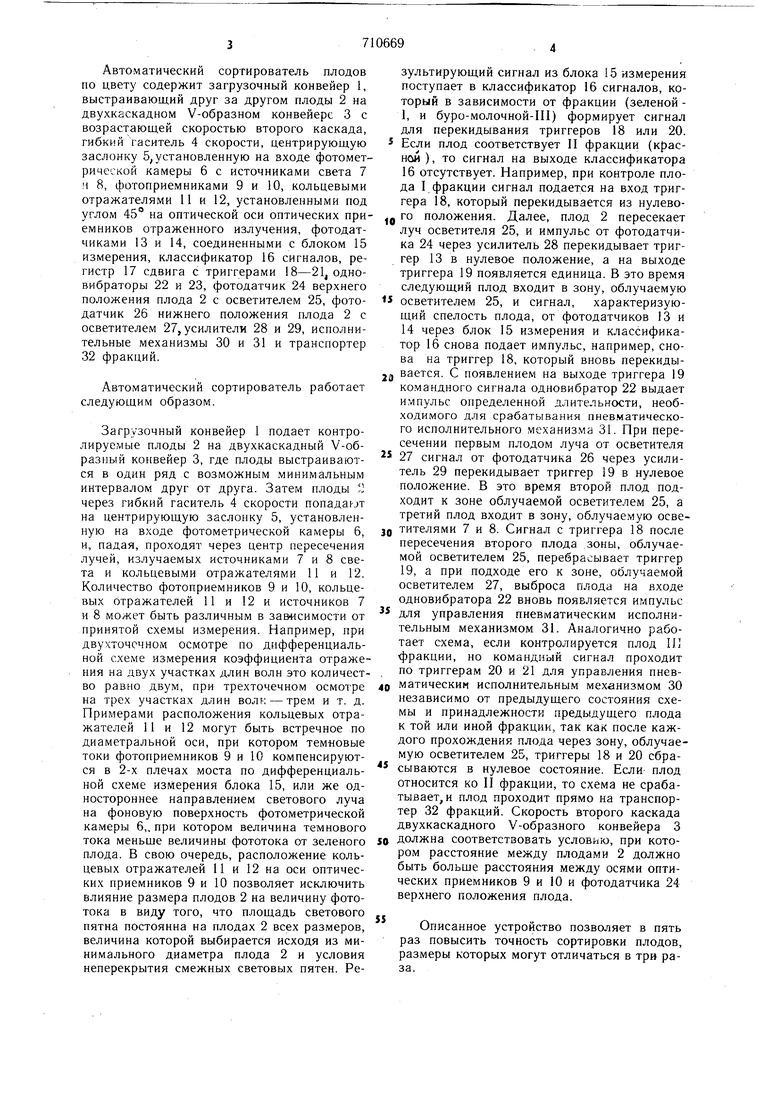
На чертеже представлена схема автоматического сортирования плодов по цвету.
Автоматический сортирователь плодов по цвету содержит загрузочный конвейер 1, выстраивающий друг за другом плоды 2 на двухкаскадном V-образном конвейере 3 с возрастающей скоростью второго каскада, гибкий гаситель 4 скорости, центрирующую заслонку 5,установленную на входе фотометрической камеры 6 с источниками света 7 и 8, фотоприемниками 9 и 10, кольцевыми отражателями 11 и 12, установленными под углом 45° на оптической оси оптических приемников отраженного излучения, фотодатчиками 13 и 14, соединенными с блоком 15 измерения, классификатор 16 сигналов, регистр 17 сдвига с триггерами 18-21, одновибраторы 22 и 23, фотодатчик 24 верхнего положения плода 2 с осветителем 25, фотодатчик 26 нижнего положения плода 2 с осветителем 27,усилители 28 и 29, исполнительные механизмы 30 и 31 и транспортер 32 фракций.
Автоматический сортирователь работает следующим образом.
Загрузочный конвейер 1 подает контролируемые плоды 2 на двухкаскадный V-образный конвейер 3, где плоды выстраиваются в один ряд ,с возможным минимальным интервалом друг от друга. Затем плоды ,1 через гибкий гаситель 4 скорости попадают на центрирующую заслонку 5, установленную на входе фотометрической камеры 6, и, падая, проходят через центр пересечения лучей, излучаемых источниками 7 и 8 света и кольцевыми отражателями 11 и 12. Количество фотоприемников 9 и 10, кольцевых отражателей И и 12 и источников 7 и 8 может быть различным в зависимости от принятой схемы измерения. Например, при двухточечном осмотре по дифференциальной схеме измерения коэффициента отражения на двух участках длин волн это количество равно двум, при трехточечном осмотре на трех участках длин волк - трем и т. д. Примерами расположения кольцевых отражателей 11 и 12 могут быть встречное по диаметральной оси, при котором темиовые токи фотоприемников 9 и 10 компенсируются в 2-х плечах моста по дифференциальной схеме измерения блока 15, или же одностороннее направлением светового луча на фоновую поверхность фотометрической камеры 6„ при котором величина темнового тока меньше величины фототока от зеленого плода. В свою очередь, расположение кольцевых отражателей 11 и 12 на оси оптических нриемников 9 и 10 позволяет исключить влияние размера плодов 2 на величину фототока в виду того, что площадь светового пятна постоянна на плодах 2 всех размеров, величина которой выбирается исходя из минимального диаметра плода 2 и условия неперекрытия смежных световых пятен. Результирующий сигнал из блока 15 измерения поступает в классификатор 16 сигналов, который в зависимости от фракции (зеленой 1, и буро-молочной-111) формирует сигнал для перекидывания триггеров 18 или 20. Если плод соответствует II фракции (красней ), то сигнал на выходе классификатора 16 отсутствует. Например, при контроле плода I фракции сигнал подается на вход триггера 18, который перекидывается из нулево- го положения. Далее, плод 2 пересекает луч осветителя 25, и импульс от фотодатчика 24 через усилитель 28 перекидывает триггер 13 в нулевое положение, а на выходе триггера 19 появляется единица. В это время следующий плод входит в зону, облучаемую
осветителем 25, и сигнал, характеризующий спелость плода, от фотодатчиков 13 и 14 через блок 15 измерения и классификатор 16 снова подает импульс, например, снова на триггер 18, который вновь перекидыJ вается. С появлением на выходе триггера 19 командного сигнала одновибратор 22 выдает импульс определенной длительности, необходимого для срабатывания пнев.матического исполнительного механизма 31. При пересечении первым плодом луча от осветителя
5 27 сигнал от фотодатчика 26 через усилитель 29 перекидывает триггер 19 в нулевое положение. В это время второй плод подходит к зоне облучаемой осветителем 25, а третий плод входит в зону, облучаемую освеQ тителями 7 и 8. Сигнал с триггера 18 после пересечения второго плода зоны, облучаемой осветителем 25, перебрасывает триггер 19, а при подходе его к зоне, облучаемой осветителем 27, выброса плода на входе одновибратора 22 вновь появляется импульс для управления пневматическим исполнительным механизмом 31. Аналогично работает схема, если контролируется плод III фракции, но командный сигнал проходит по триггерам 20 и 21 для управления пневматическим исполнительным механизмом 30 независимо от предыдущего состояния схемы и принадлежности предыдущего плода к той или иной фракции, так как после каждого прохождения плода через зону, облучаемую осветителем 25, триггеры 18 и 20 сбрасываются в нулевое состояние. Если плод относится ко II фракции, то схема не срабатывает, и плод проходит прямо на транспортер 32 фракций. Скорость второго каскада двухкаскадного V-образного конвейера 3
должна соответствовать условию, при котором расстояние между плодами 2 должно быть больще расстояния между осями оптических приемников 9 и 10 и фотодатчика 24 верхнего положения плода.
Описанное устройство позволяет в пять раз повысить точность сортировки плодов, размеры которых могут отличаться в три раза.
Формула изобретения
Автоматический сортирователь плодов по цвету, содержащий фотометрическую камеру со входом и выходом для плодов, источники света и расположенные на внешней поверхности фотометрической камеры фотоприемники с пересекающимися оптическими осями в центре плода, oтлuчaющtf cя тем, что, с целью повышения точности сортировки плодов независимо от их размеров, в него дополнительно введены кольцевые отражатели, расположенные вдоль оптической оси
так, что углы между фотоприеминкамн и плоскостями кольцевых отражателей равны тлам между источниками света и плоскостями кольцевых отражателей.
Источники информации, принятые во внимание при экспертизе
,Лх Р/
...™J7К
