(54) УСТРОЙСТВО ДЛЯ МНОГОКАНАЛЬНОГО КОНТРОЛЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для многоканального контроля | 1983 |
|
SU1110313A2 |
| Устройство для моногоканального контроля | 1975 |
|
SU566193A2 |
| Устройство для многоканального контроля | 1979 |
|
SU841007A1 |
| УСТРОЙСТВО ДЛЯ МНОГОКАНАЛЬНОГО КОНТРОЛЯ | 1972 |
|
SU424236A1 |
| УСТРОЙСТВО ДЛЯ МНОГОКАНАЛЬНОГО КОНТРОЛЯ | 1971 |
|
SU426236A1 |
| Устройство для многоканальногоКОНТРОля | 1979 |
|
SU840814A1 |
| Устройство для многоканального контроля | 1983 |
|
SU1153337A2 |
| Устройство для многоканального контроля | 1983 |
|
SU1119054A1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2003 |
|
RU2263401C2 |
| Устройство для сбора и передачи информации о параметрах оборудования | 1978 |
|
SU767806A1 |
I
Изобретение предназначено для использования в области автомат1ЖН и;. может выполнять функции многоточеч- ного контроля параметров по амплитудно-частотным сигналам датчиков.. По основному авт. св. № 426238 известно устройство, содержащее многоканальный коммутатор переменного тока, первые два входа которого соединены cooTBeTCTEseHHo с выходами распределителя первой координаты матриггь и распределителя второй координаты ма-ррииы, первый вход распределителя первой координаты матриш, соединень с выходом генератора тактовых импульсов, вход которого подключен к одйому из выходов схемы дистаншюнногч управления, второй выход которой соединен со вторыми входами распределителей первой и второй координат матрицы, третьи входы которых соединены меЖ-. ду собой, а вторые выходы их подключены к первым двум входам индикатора, третий выход, распределителя первой ко-
2
ординаты матрицы соединен с первым входом распределителя второй координаты матрнЦь, выход анализатора подключен к первому входу узла- аварийной защиты и входу блока выдачи отклонений, в информации, выход последнего
. соединен со вторым входом схемы автоматического контрЬля работы, второй нь1ход которого связан со вторым входом узла аварийной защиты, распреде- . литель третьей координаты матрицы, первый вход которого соединен с третьим , выходом рабпределителя второй координаты матрицы, второй вход со вторым- входом распределителя второй координаты, третий , С третьим входом распределителя второй координаты матрйны и вторым-выходом схемы автомат сческого контроля работы, второй вход -которой соевднен с треты-тм выходом распределителя третьей координаты мат ри1ты, второй выход распределителя Tj)eтьеи координаты матрицы подкгаочен к третьему входу коммутатора, выход
которого, а также третий выход схемы дистанционного управления и первый HbiXoa схемы автоматического контроля Wi fiif соотве№ТЙёЩо с 1р дамн анализатора 1.
Недостатком известного уст юйства является то, что подключение датчиков через йВ Уутатор на вход анализатора осуществляется последователТь но е постоянной скоростью. Время анализатора сигнала датчика обратнопропорциональ но зависит от частоты сигнала да;гчика и задается частотой генератора тактовых импульсов, которая выбрана постоянной н достаточной для контроля датчика с наименьшей частотой сигнала датчика.
При большом разбросе частоты сигналов датчиков появляется большое избытОчНОё врёмя, которое снижает скорость пере1ключения датчиков.
Цель изобретения - повышение быс родеЙсТвия устройства.
Эта цель достигается тем, что в устройство для многоканального контроля по авторскому свидетельству fs 426236 в.1вёдёнь1 рёлёП ёИёни, элемент И и формирователь ймпулЬса заnT6 a, 6дийй,1ход которого пс дключен к дополнительному входу генератора тактовых импульсов, другой выход соединен ЙёйОСрёдственно с четвертым входом аналйё1атора и через реле времени - с первым входом элемента ИЛИ, ко вторШу iSixOfly которого подключен дополнительный выход анализатора, выход элемента ИЛИ : соединен со входом фОрмирователя импульса запуска.
Введение дополнительных элементов связейпозволяет непосредственнб после измерения параметра сигнала формир ва1ть трактовый mnpbct itpi ifoSi 6 f сутствует избыточное время в периоде такта7 т.ё; ЙлйтелШоёт ь по тоянна, а определяетс,я параметрШи сигнала.
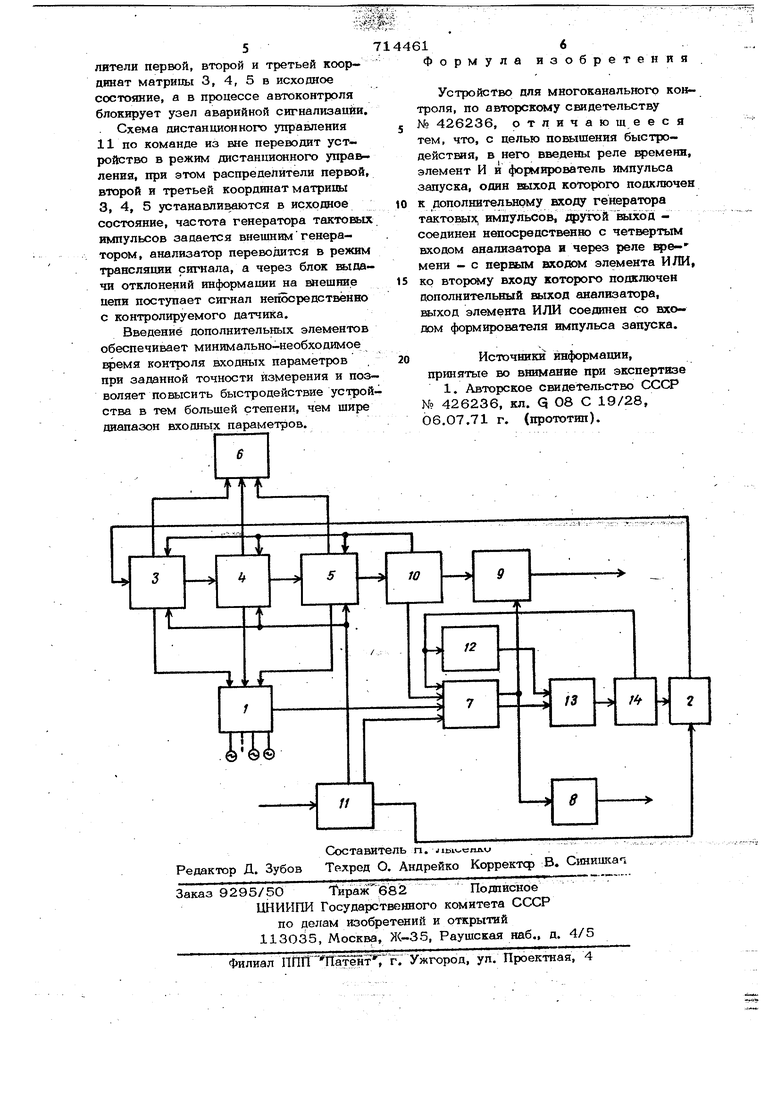
На чертеже изображена ст руктурная схема устройства, которое содержит коммутатор 1, генератор тактоЕьгх импульсов 2, распред;елйтепй пё|рво1, второй и третьей координат матрицы соответственно 3, 4, 5, индикатор 6, анализатор 7, блок выдачи отклонений информапии 8, узел аварийной сигнализации 9, схему автоматического контроля 1О,ехёйУ дистанционного управленния 11, реле времени 12, элёмё1ат. ИЛИ 13, формирователь импульса запуска 14.
Устройство работает следующим образом.
Генератор тактовых импульсов 2 задает переменную длительность опроса
адреса, набираемого распределителями первой, второй и третьей координат матрицы 3, 4, 5, которые соединены последовательно друг с другом. Код распределителя определяет адрес входнбго датчика, подключенного через коммутатор 1 к анализатору 7. Индикатор 6 отображает этот адрес в визуальной форме. Анализатор 7 в случае выхода любого из параметров выдает сигнал
в блок выдачи отклонений информации 8 и на узел аварийной сигнализации 9. Сразу после измерения параметра в анализаторе 7 формируется импульс который, проходя через элемент ИЛИ 13,
запускает формирователь импульса запуска 14, который переводит в исходное состояние реле времени 12 и анализатор 7, а так же запускает генератор тактовыхимпульсов 2, который
формирует тактовый импульс. В случае, если сигнала с анализатора не поступаеТ в течение определенного времени, а это может быть либо при отсутствии входного сигнала на анализаторе, либо когда tacTOTa входного сигнала ниже рабочего диапазона частот, который определяется в основном времени 12, приходит сигнал с реле времени на элемент ИЛИ 13 и далее на формирователь
импульсазапуска 14, чем устанавливает анализатор 7 и реле времени 12 в исходное состояние, а так же запускает гейератор, тактовых импульсов 2. Блок выдачи отклонений информации б обрабатывает данные анализатора 7 и выдает сигнал отклонений во внешние цепи. Узел аварийной сигнализации 9 выдает сигнал во внешние цепи в случае набора определенной комбинации сигналов отклонений. Выходной импульс с выхода распределителя третьей координаты матрицы 5 поступает на схему автоматического контроля 10, которая после прихода определенного
числа таких иК1пульсов осуществляет автоматический контроль работоспособности устройства, для этого на вход анализатора 7 поступают сигналы имитации. После набора всех сигналов
автоконтроль прекращается и схема переводится в режим основной работы. Схема автоматического контроля 10 в конце контроля сбрасывает распределители первой, второй и третьей коор- динат матрицы 3, 4, 5 в исходное состояние, а в процессе автоконтроля блокирует узел аварийной сигнализации.
Схема дистанционного управления 11 по команде из вне переводит устройство в режим дистанционного упра&. ления, при этом распределители первой, второй и третьей координат матрицы 3, 4, 5 устанавливаются в исходное состояние, частота генератора тактовых импульсов задается внешним генератором, анализатор переводится в режим трансляции сигнала, а через блок выдачи отклонений информации на внешние цепи поступает сигнал непосредственно с контролируемого датчика.
Введение дополнительных элементов обеспечивает минимально-необходимое время контроля входных параметров при заданной точности измерения и позволяет повысить быстродействие устройства в тем большей степени, чем шире диапазон входньтх параметров.
Формула изобрет е н и я
Устройство для многоканального контроля, по авторскому свидетельству
№ 426236, отличаюшееся тем, что, с целью повышения быстродействия, в него введены реле времени, элемент И и формирователь импульса запуска, один выход которого подключен
к дополнительному входу генератора тактовых, импульсов, ppyrofi ibbixoa соединен непосредственж) с четвертым входом анализатора и через реле времени - с входом элемента ИЛИ,
ко вторс у входу которого подключен дополнительный выход анализатора, выход элемента ИЛИ соединен со входом формирователя импульса запуска.
Источники информации,
принятые во внимание при экспертизе
