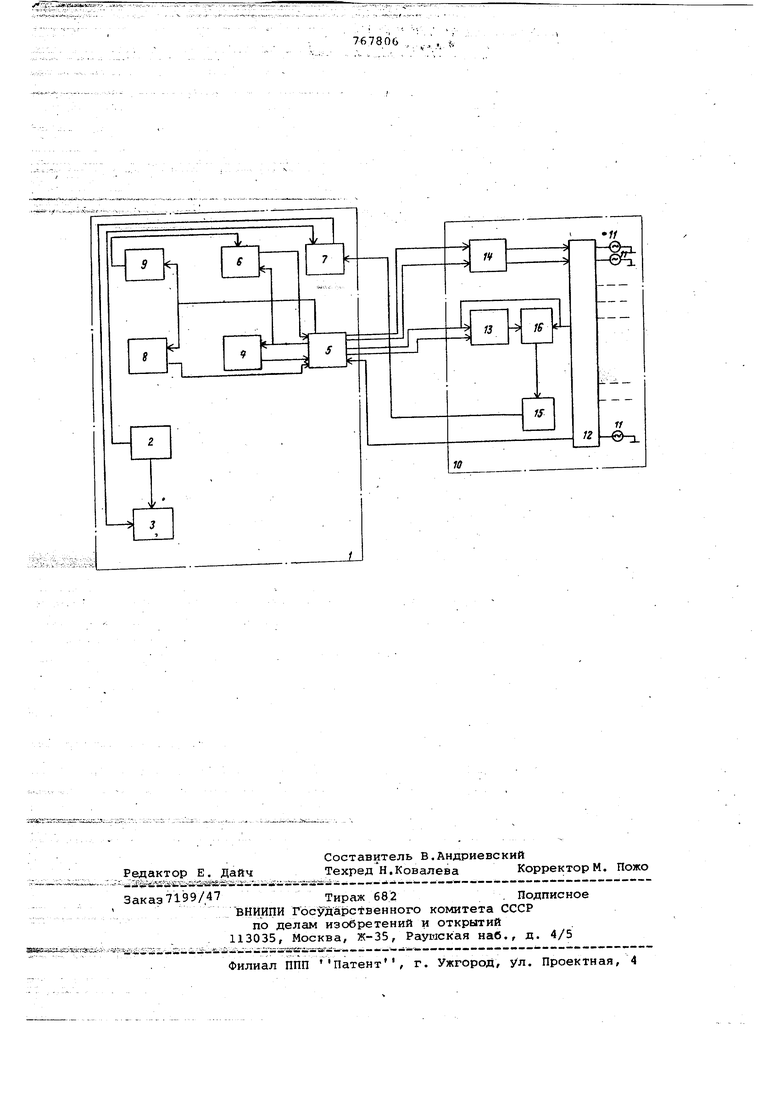
Устройство для сбора и передачи информации о параметрах оборудования является телемеханическим устройством и может быть использовано для контроля параметров оборудования по частотным сигналам датчиков. Существует устройство для сбора и обработки статистической информации, которое содержит буферный запоминающий блок, блоки нормирования, сравне ния, памяти, управления и синхронизации, задания программ, программной об работки, вызова, индикации и регистра ции 1 .Однако это устройство осуществля ет .ста тистическуюобработку ИНФОРМАЦИИ, что снижает оперативность выработки управляющей команды по каждому входному сигналу. При обс,г1уживании больших массивов, оборудования устройство будет громоздким, с увеличением числа контролируемого оборудования будет резко ухудщаться оперативность управления устройством, в нем отсутствует непрерывный контроль по каждому датчику. . Наиболее близким техническим реше нием по своей технической сущности является устройство для сбора и пере дачи информации о параметрах оборудо- вания, содержащее на диспетчерском пункте шифратор адреса, первый выход которого соединен с первым входом блока индикации, блок управления коммутатором контролируемых пунктов, выход которого подключен к первому входу коммутатора контролируемых пунктов, первый выход которого соединен с входом блока управления коммутатором контролируемых пунктов и с первым входом блока управления коммутаторами объектов, выход, которого подключен к второму входу коммутатора контролируемых пунктов, второй выход шифратора адреса соединен с первым входом блока избирательного вызова, первый выход которого подключен к второму входу -блока индикации, на каждом контролируемом пункте - датчики, подключенные к информационным входам коммутатора объектов, первый выход которого сое«динен с третьим входом коммутатора контролируемых , второй и третий входы которого подключены соответственно к первому и второму входам блока формирования контрольных сигналов, четвертый и пятый вхо.щ-1 соединены со входами блока формирования тактовых .импульсов, выходы которого соединены с первым и вторым входами коммутатора объектов 2. Недостатком этого устройства является невысокая информационная емкость устройства. Целью изобретени я является повышение информационной емкости устройства Эта цель достигается тем, что в устройство для сбора и передачи информации о параметрах оборудования введены на диспетчерском пункте блок контроля и блок порогового анализа сигна-, лов, шестой выходкоммутатора контролируемых пунктов соединен с первым входом блока контроля и через блок порогового анализа сигналов - с вторым входом блока управления коммутаторами объектов, седьмой выход коммутатора контролируемых пунктов подключен к второму входу блока контроля, на каждом контролируемом пункте введены блок формирования сигналов отклонения и блок анализа сигналов, второй выход коммутатора объектов соединен с первым входом блока анализа сигналов и с вторым входом блока формирования контрольных сигналов, выход которого подключен к второму входу блока- анализа сигналов, первьдй выход блрка анализа сигналов через блок формирования сигналов отклонения соединен с вторым входом блока избирательного вызова на диспетчерском пункте. На чертеже изображена блок-схема предложенного устройства. Оно содержит диспетчерский пункт 1, включающий шифратор 2 адреса, блок 3 индикации/ блок 4управления коммутатором контролируемых пунктов, коммутатор 5 контролируемых пунктов, блок 6 управления коммутаторами объектов, блок 7 избирательного вызова, блок 8 конт9 порогового анализа сигна роля, блок лов; и контролируемый пункт 10 содержащий датчики 11, коммутатор 12 Объек , тов, блок 13 формирования контрольнь1Х сигналов, блок 14 формирования TaKTOBbix импуЛьсов, блок 15 формирова ния сигналов отклонения и блок 16,ана лйза сигналов. ; , . : Датчики 1.1 параметров оборудования подключены на вход коммутатора 12 , объектов контролируемого пункта. Коммутатор объектов ростоит из переключа Ю14их яче.эк переменного тока, скомпа.нованньЕХ в матричном порядке, из распределителей управляющих напряжений для поочередного открывания ключевых ячеек и генератора тактовых импульсоб определяющего скорость переключения переключающих ячеек. Выходкоммутатора 12 подключен на вход блока 16 анализа сигналов. . БЛОК 16 состоит из частотного и амплитудного пороговых детекторов и счетчиков количества отклонений частотного сигнала по амплитуде и частоте с . пороговой уставкой по количеству отклонений. Выход блока 16 подключен на вход блока 15, который содержит усилители и релейные элементы сигнализации. На вход коммутатора 12 подключен выход блока 14, который содержит ifCHлители команд и формирователь внешних тактовых импульсов. На вход коммутатора объектов 12, связанный с установочными входами распределителей, подключен выход блока 14 . Блок 13 содержит ключевой элемент и схему управления ключом. Выход блока 15 и блок 7, который содержит автоматическую коммутационную аппаратуру, может быть подключен на вход блока 3. Блок индикации 3 сигналов нарушения и адреса контролируемого пункта (КП) содержит элементы индикации и ключевые элементы. Вход блока 3 соединен с вы содом шифратора 2, который содержит номеронабиратель адреса КП и ключевые элементы. Блок 4 содержит генератор тактовых импульсов и пересчетные устройства с цифровой индикацией состояния. Блок 6 содержит тактовый генератор, пересчетные схемы и элементы управления . На вход блока б подключен выход блока 9. Блок 9 содержит частотный и амплитудный детекторы и счетчики количества датчиков с отклоне 1Иями с цифровыми индикаторами по виду Отклонений. Блок контро тя 8 содержит генератор контрольной частоты, частотомер и логические схемы. ., Устройство работает следующим рбр&ЭОМ. . Непрерывный автоматический контроль датчиков обеспечивается поочередным периодическим подключением с помощью коммутатора 12датчиков 11 на , Х.ОЯ блока 16. При появлении сигналов датчиков с отклонениями от. заданных значений по амплитуде или частоте частотный или амплитудный детекторы бло з 16 выдают сигнал на блок 15 для 1 формирования команд по каждому виду и по количеству отклонений. Усиленный сигнал датчика И поступает на вход блока 9.. При поступлении на блок 7 коммутационная аппаратура блока 7 сработаети выдаст команду на вход блока индикации 3, элементы индикации блока выеветят адрес КП 10 и характер сигна- ла отклонения (одиночный или групповой) или сигнал нарушений работы КП. Лля определения адреса датчика с сигналом отклонения и для наблюдения за развитием аварийной ситуации оператор с помощью элементов управления шифратора 2 выдает команду в блок 7, коммутационная аппаратура которого выдает команду,на коммутационную апгГаратуру блока 5. При этом с блока 4 подаются команды на сброс в исходное состояние распределителей блока 12 выбранного КП, на цифровом индикаторе блока 4 высвечивается номер подключенного КП. При поступлении сигнала синхрониза ции на диспетчерский пункт 1 оператором осуществляется команда на блок б на выдачу тактовых импульсов на вход блока 14, где тактовые импульсы формируются, устраняя искажение вноси№ле каналом,и выдаются на вход гене ратора тактовых импульсов коммутатора 12 для управления его работой. При этом возможны: следующие режимы работы: .. а)режим ручного переключения датчиков -оператор управляет генератором тактовых импульсов блока 6 вручную для выбора заданного датчика 11; б)режим автоматического переключе ния датчиков, где осуществляется два рода работы-подсчет: количества датчиков с отклонениями на одном КП (подсчёт количества ведется раздельно по каждому виду отклонений блоком 9); в)режим поиска адресов датчиков с отклонениями, где также осуществляется работа или на группе КП. Сигнал с выхода блока 9 поступает на вход блока б. При подключений к блоку 9 датчика с сигналом, отклоняющимся от заданных параметров по частоте или г амплитуде, выдается сигнал на срабатывание схемы запрета тактовых импуль сов, а цифровые индикаторы блока 3 высвечивают адрес датчика в сйстеме координат КП. Для продолжения поиска подается команда на блок 6; г)режим проверки настройки и срабатывания блока 16 и блока 15 КП осуществляется с блока 8. При этом на КП подается сигнал на один из входов блока 13, на другой вход подается сиг нал с генератора контрольной частоты блокаконтроля 8. С выхода блока 13 контрольная частота поступает на вход блока 16, вызывая срабатывание его детекторов. При этом с блока 15 сигналы срабатывания детекторов .поступают на блок 3, где фиксируются. По индикаторным устройствам блока3 оператор судит о правильности настройки и срабатывания частотных детекторов КП. Предлагаемое устройство дает возможность одному человеку за 8 - Юмин получить полную информацию о состоянии контролируемого объекта, повышает надежность информации путем реализации контроля настройки пороговой сигнализации. В отличие от прототипа устройство ведет непрерывный.контроль в реальном масштабе времени за каждым датчиком из любого сколь угодно большоI го массива и обеспечивает возможность надежного оперативного поиска /в пределах нескольких секунд/ и дистанцио ного подключения на контроль каждого датчика для оперативного принятия не обходимых мер, позволяет следить за групповыми аномалиями и оперативно в них вмешиваться. Формула изобретения Устройство для сбора и передачи информации о параметрах оборудования, соде эжащее на диспетчерском пункте шифратор адреса, первый выход которого соединен с первым входом блока индикации, блок управления коммутато ром контролируемых пунктов, выход / которого подключен к первому входу коммутатора контролируемых пунктов, первый выход которого соединен со входом блока управления коммутатором контролируемых пунктов и с первым входом блока управления коммутаторами объектов, выход которого подключён к второму входу коммутатора контролируeiuHJX пунктов, второй выход шифратора адреса соединен с ПёрвймвходОм блокаизбирательного вызова, первый выход которого подключен к вт6po iy входу блока индикации, на каждом контролируемом пункте - датчики, подключенные к информационным входам Коммутатора объектов, первый выход которого соединен с третьим входом коммутатора контролируемых пунктов, второй и третий входы которого подключены соответственно к первому и второму входам блока формирования контрольных сигналов, четвертый и пятый входы соединены с входами блока формирования тактовых импульсов; выходы которого соединены с первым и вторым входами коммутатора объектов, отличающеес я тем, что, с целью повышения информационной емкости устройства, в него введены на диспетчерском пункте блок контроля и блок порогового анализа сигналов, шестой выход коммутатора контролируемых, пунктов соединен с первым входом блОка контроля и через блок порогового анализа, сигнала - с вторым входом блока управления коммутаторами объектов, седьмой выход коммутатора контролируемых пунктов подключен к второму входу блока контроля, на каждом контролируемомпункте введены блок формирования сигналов отклонения и блок анализа сигналов, второй выход ко1 |утатора объектов соединен с первым входом блока анализа сигналов и с вторым входом блока формирования контрольных сигналов, выход которого подключен к второму входу блока анализа сигналов, первый выход блока анализа сигналов через блок формирования сигнашов отклонения соединен со втор1лм входом блока избирательного вызова на диспетчерском пункте. . Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 283669, кл. G 06 F 15/46, 1969. 2.Тутевич В.Н. Телемеханика. И., Энергия, с. 261.
767806
| название | год | авторы | номер документа |
|---|---|---|---|
| Система телемеханики для управления рассредоточенными объектами | 1977 |
|
SU743004A1 |
| Устройство для передачи и приема сигналов | 1975 |
|
SU551686A1 |
| Устройство для телеуправления иТЕлЕСигНАлизАции пО СилОВыМРАСпРЕдЕлиТЕльНыМ СЕТяМ | 1979 |
|
SU824261A1 |
| Устройство для приема и регистрации телесигналов | 1978 |
|
SU698031A1 |
| ВПТ5 Щ тШп^^:^ | 1973 |
|
SU408363A1 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА ИНФОРМАЦИИ О СОСТОЯНИИ КОНТРОЛИРУЕМЫХ ПУНКТОВ И ТЕЛЕМЕХАНИЧЕСКАЯ СИСТЕМА "ЛИЛАНА" ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2010338C1 |
| Комплексное телемеханическое устройство | 1980 |
|
SU960892A1 |
| Устройство для сбора и передачи информации | 1976 |
|
SU708389A1 |
| Система телемеханики | 1981 |
|
SU1005142A1 |
| Система телемеханики | 1982 |
|
SU1152015A1 |