1
Изобретение относится к области силоизмерительной техники-и может быть использовано для измерения |« мента электрических микромашин, например . атчиков угла.
Известный преобразователь момента вращения в ток, содержащий измерительный механизм с магнитйым устройством, и датчик входного смещения механизма,|п не обеспечивает требуемой точности . измерения I,Наиболее близким по технической сущности к изобретению является ; устройство для измерения момента электрических микромашин, содержащее 5 компенсационный датчик момента, обмотка управления которого через регистрирующий прибор и усилитель соединена с выходной обмоткой йатчика углового перемещения подвижной 20 оси, с которой жестко связан ротор испытуемой микромашины, и задающее устройство 2. Недостатками такого устройства также являются низкая точ-. ность измерения, обусловленнаяот.- - утствием возможности точного опрееления минимальной суммарной вёличины паразитных моментов, а также ограниченный угловой диапазон измерения з-за погрегиности, связанной с изме- 30
нением коэффициента передачи компенсационного датчика момента в зависимости от углового положения его ротора. .
Целью изобретения является повышение точности и расширение углового диапазона измерение. Указанная цель в предлагаемом устройстве достигается за счет того, что ротор компенсационного датчика момента и ютор дат:чика углового перемещения закреплены на общей втулке, установленной на подвижной оси с возможностью фиксаци этой втулки в требуемом угловом положении, а статор испытуемой микромашины кинематически связан с валом исполнительного двигателя, обмотка управления которого соединена с выходом дополнительного усилителя, один вход которЪго связан с задающим устройством непосредственно а другой - через выходную обмотку испытуемой микрсмашины.
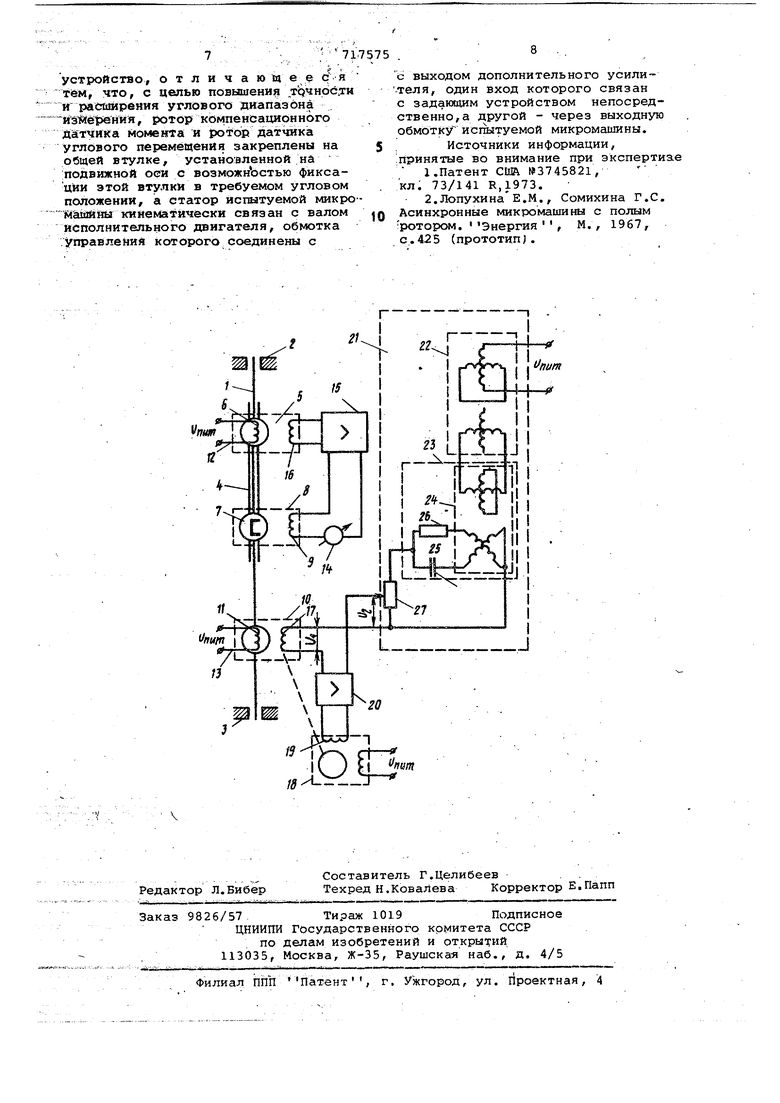
функциональная схема устройства представлена на чертеже.
Устройство для измерения момента электрических микромашин содержит подвижную ось I, установленную в опорах 2,3. На оси установлена втулка 4 с возможностью свободного вращенияг и последующей фиксации в Требуемом угловом положении, что мозкет быть осуществлено, например, с помощью фиксирующих винтов.На втулке 4 закреплены ротор датчика 5 углового перемещения оси 1 с обмоткой возбуждения 6 и ротор 7 компенс ЦйонноГо датчика 8 момента с обмотк 9 управления. Непосредственно на оси 1 установлен ротор испытуемой микромашины Ю с обмоткой И возбуждения. ОбмоТки возбуждения б, 11 через токоподвода 12, 13 соединены С источником питания (на чертеже не показан). Обмотка 9 управления компенсационного датчика 8 мойёнта через регистрирующий прибор (амперметр) 14 и усилитель 15 подсоединен квыходной обмотке 16 датчика 5 углового положения оси 1. Статор испытуемой микромашины с вьоходной обмоткой I КййемаТйЧёски с валом дополнительного двигателя 18, обмотка 19 управления которого соединена с выходом дополнительного усилителя 20, Один вход усилителя 20 подключен к задающему устройству 21 непосредственно, а другой через вькЬдную обмотку 17 испыт /ёмой микромашины 10. . Задающее устройство 21 содержи поворотный трансформатор 22, одна обмоток которого подключена к исто нику питания (на чертеже не показан) , фазовращатель 23, состоящий и п6воротного трансформатора 24, крн дёнсатора 25 и резистора 26, и фун циональный делитель 27 напряжения, представляющий собой набор прецизи НУх резисторов, комбинат-шя которых тюзволяет получить на выходе з,адак) щего устройства 21 напряжение Uj , йзмён як)Щёбся по закону йзмёнёнйя напряжения Uj с выходной обмотки 17 испытуеКюй микромашины (на чергте е функциональный делитель напря жения для упрсядения представлен в виде потенциометра). Поворотный трансформатор 22 служит для измене ния масштаба напряжения U, а фазо вращатель 23 - для согласования напряжений Uj и Ui по фазе (получения противофазного напряжения U равного по амплитуде напряжению и,). Устройство работает сгледующим образЬм. Вначале производится определение исходного (нулевого) положения оси 1, соответствующего минимальной суммарной величине паразитных Моментов.,Эта операция осуществляется вручную при отключеннрм питаййй испытуемой микромапины путем плавного вращения (поворота) втулк 4 на оси 1 на некоторый угол в пре делах 360. При этом 8тулка 4 проходит 1эяд угловых зон, в каждой изкоторых наблюдается различная суммарная величина паразитных моментов , соответствующая определенному значению тока Ij, регистрируемого амперметром 14, При положении втулки 4, соответствующем минимальному значению тока I втулка 4 жестко закрепляется на оси 1. Благодаря указанной операции нулевое положение оси Д соответствует не .произвольному, а минимальному уровню паразитных моментов. Установленное нулевое положение оси 1 сохраняется неизменным во всем угловом диапазоне измерения. При отклонении оси 1 от установленйого нулевого положения на выходной обмотке 16 датчика 5 углового перемещения оси 1 появляется сигнал, который усиливается усилителем 15 и поступает на обмотку 9 компенсационного датчика 8 момента. В датчике 8 возникает Момент, возвращающий ось 1 в нулевое положение. Затем производится установка статора 17 испытуемой микромашины в требуемое угловое положение. Для этого с помощью задающего устройства 21 вырабатывается напряжение Uj, , соответствующее требуемому углу, измерения, например углу 15 . При этом масштаб напряжения устанавливаемый предварительно- в зависимости от параметров испытуемой микромашины, должен изменяться в пределах от нуля до максимального значения источника питания задающего устройства 21. Амплитуда напряжения Uj должна соответствовать амплитуде напряжения U, которое устанавливается на выходной обмотке 17 испытуемой .микромашины 10 при определенном угловом положений (в рассматриваемом случае 15°) ее статора. Кроме того, напряжение Цц должно быть в противофазе относительно напряжения U во всем угловом диапазоне измерения. Выработка напряжения и ,удовлетворяющего указанным условиям, осуществляется следующим образом. При подаче напряжения на поворотный трансформатор 22 на его выходной обмотке появляется сигнал 11г2 К °и 54n(i, где KT - коэффи- ,. диент трансформации для выбранного тийа поворотного трансформатора; - угол поворота ротора поворотного трансформатора 22 относительно его статора. За счет, поворота ротора поворотного трансформатора 22 сигнал U21 может изменяться от нуля до максимального значения Ку. и пит Сигнал Ujj, в свою очередь, является входным сигналом для фазовращателя 23, на выходе которого возникает напряжение, которое при повороте ротора фазовращателя 23 относительно его статора сохраняется постоянным по величине, а фаза этого напряжения линейно изменяется в зависимости от.угла поворота ротора фазовращателя 23.,
Благодаря этому обеспечивается изменение фазового сдвига напряжения и2. на выходе задающего устройства 21 таким образом, что напряжение UT, оказывается в прбтивофазе с. напряжением Uj на выходной обмотке испытуемой микромашины во всем угловом диапазоне измерения.
На выход задающего устройства 21 напряжение с выхода фазовращателя 23 поступает через функциональный делитель 27 напряжения, с помощью которого осуществляется изменение амплитуды напряжения и по функциональному закону изменения напряжения и на выходной обмотке испытуемой микромашины при изменении угЯбвого положения ее статора 17, Примером такого функционального закона, определяющего амплитуду напряжения U. может служить линейный закон
(2)
АЛ,
и.
2. -с синусоидальный закон.
Uo sin .
(3). ti - . .
где А - масштабный коэффициент, требуемая величина которого устанавливается за счет поворота ротора поворотного трансформатора 22 относительно статора;
угол поворота статора 17 исптуемой микромашины 10 относительно ее ротора 11.
Формирующаяся разность напряжений Uj и и2, через усилитель 20 поступает на обмотку 19 управления исполнительного двигателя 18.
В случае, если угловое положение статора 17 импытуемой микромашины 10 не соответствует заданному и определяемому напряжением Uj , разность напряжений, поступая на обмоку .19 двигателя 18, приводит, к появлению в нем вращающего момента. Бал двигателя 18 с закрепленным на нем статором 17 испытуемой микромашины lO поворачивается. Поворот происходит до тех пор, пока на выходной обмотке 17 микромашины 10 не установится напряжение, равное напр)яжению U2 задающего устройства 21.
Таким образом, установка испытуемой микромашины в задан.ное угловое положение осуществляется за счет ;; поворота статора микромашины 10 при положении ее ротора 11, соответствующем нулевому положению оСи 1, определенному в результате предварительной операции.
Измерение момента осуществляемся следующим образом.
Включается питание ротора 11 испытуемой микромашины 10. Установленное угловое положение ее статора 17 относительно ротора 11 соответствует определенной величине момента, создающегося в испытуемоймикромашине; Под воздействием этого момента ось 1 отклоняется от йулевого положения на определенный угол, велич:ина которого 5 пропорциональна измеряемому моменту. При этом при любом заданном положении статора 17 угловое отклонение ;Оси 1 от нулевого положения не превышает нескольких минут и поэтому пракQ тически не влияет на постоянство коэффициента пропорциональности между током в обмотке компенсационного датчика момента и развиваемым этим датчиком моментом, а суммарная величина паразитных моментов, действующих на оси 1, пренебрежимо мала.
Величина момента испытуемой микромашины 10 определяется по формуле
М к (Ij, - Ij) ,
0 где
Ij - ток через амперметр 14, соответствующий минимальной суммарной величине паразитных моментов рри нулевом Положении оси 1;
5 г через амперметр 14,
соответствующий сумме паразйтйых : моментов при нулевом положении оси 1 и момента испытуемой микромашины 10 при заданном угле поворота
0 статора 17;
К - коэффициент пролорциональности между током в обмотке компенсационного датчика момента и развивавмым этим датчиком моментом.
. При этом величина тока. I, при переходе на другие углы измерения, например., при углах +30 , остается постоянной и минимально возможной, в то время как величина тока Ij, несущая информацию об изменяющемся моменте и соответствующая определенному отклонению оси1 от нулевого положения, является переменнрй.
Использование устройства позволит 5 повысить ,точность измерения момента испытуемой микромашины и расширить угловой диапазон измерения за счет осуществления т{эебуемого углового .перемещения испытуемой микромашины 0 при минимально возможной суммарной величине паразитных моментов и практическом постоянстве коэффициента К во всем угловом диапазоне измерения момента.
5
Формула изобретения
Устройство для измерения момента электрических микромашин, содержащее компенсационный датчик момента,
0 обмотка управления которого через регистрирующий прибор и усилитель соединена с выходной чэбмоткой датчика углового перемещения подвижной .оси, с которой жестко связан ротор
5 испытуемой микромашины, и згщающее
устройство, о т л и ч а ю ч е е с я тем, что, с целью повьпиени т 5чн6сди и расширения углового диапазона
й°зШ1$еййя, ротор компенсационного датчика Момента и ротор датчика УГЛОВОГО перемещения закреплены на общей втулке, установленной на подвижной оси с возможнЬстью фиксации этой втулки в требуемом угловом положении, а статор испытуемой микроMaiiAHti кинематически связан с валом исполнительного двигателя, обмотка управлений которого соединены с
с выходом дополнительного усили-теля, один вход которого связан с задаюйшм устройством непосредственно, а другой - через выходную обмотку испытуемой микромашины.
Источники информации, принятые во внимание при эксперти
I.Патент США №3745821, кл. 73/141 R,1973.
2.ЛопухинаЕ.М., Сомихина Г.С. Асинхронные микромашины с полым
ротором. Энергия, М. , 1967, с.425 (прототипJ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения реактивного момента трансформаторных датчиков угла | 1979 |
|
SU905668A1 |
| Устройство для измерения пускового момента индукторного асинхронного двигателя | 1976 |
|
SU555302A1 |
| Двухотсчетный вращающийся трансформатор | 1984 |
|
SU1234927A1 |
| Преобразователь угла поворота вала в фазовый сдвиг | 1979 |
|
SU855396A1 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| Фазовая система для преобразованияуглА пОВОРОТА B КОд | 1979 |
|
SU842901A2 |
| Способ определения ухода нулевого положения вращающегося трансформатора | 1979 |
|
SU868940A1 |
| Устройство для определения точности вращающегося трансформатора | 1975 |
|
SU565354A1 |
| Устройство для измерения пульсаций пускового момента бесконтактного двигателя постоянного тока | 1980 |
|
SU881545A1 |
| АКСЕЛЕРОМЕТР-ТАХОГЕНЕРАТОР | 2015 |
|
RU2584576C1 |
пит
