1
Изобретение относится к области обработки давлением и предназначено для автоматизации управления гидравлическими прессами.
Известна система управления прессом, содержащая привод ползуна, распределительную аппаратуру, переключаемую по командам от системы слежения за положением источника радиоактивного / -излучения, установленного на ползуне 1.
Однако такая система, используемая в качестве датчика положения поковки, закрепленный на ползуне источник / -излучения обладает недостаточной точностью изза погрешностей, вносимых в систему косвенным методом измерения размера, и малой надежности системы из-за ее сложности, так как она содержит счетчик ГейгераМюллера с высоковольтным блоком питания, сельсины (приемник и датчик), электронно-преобразовательный и усилительные блоки, механические элементы передвижения, работающие в зоне вы(:оких и знакопеременных температур.
Известна также система управления прессом, содержащая привод ползуна, аппаратуру переключения скорости ползуна и датчик скорости ползуна с логическими элементами 2.
Однако известная система малонадежна из-за нахождения датчика скорости непосредственно на ползуне, т.е. в зоне высоких и знако-переменных температур, сложности многоэлементной электронной схемы, содержащей в себе, например, электромагнитные реле и т.п. и имеет невысокую точность из-за косвенного определения размеров поковки и передвижения ползуна.
Повыщение надежности и точности предлагаемой системы достигается за счет того, что система снабжена объективом, оптическая ось которого расположена на высоте поковки, а датчик скорости выполнен в виде симметрично расположенных относительно оптической оси объектива ряда пар фотоприемников, соединенных с двухвходовыми логическими элементами И и ИЛИ-НЕ, подключенных к паре фотоприемников, расположенных непосредственно по обе стороны от оптической оси объектива, выходы которых присоединены к аппаратуре выбора направления движения ползуна.
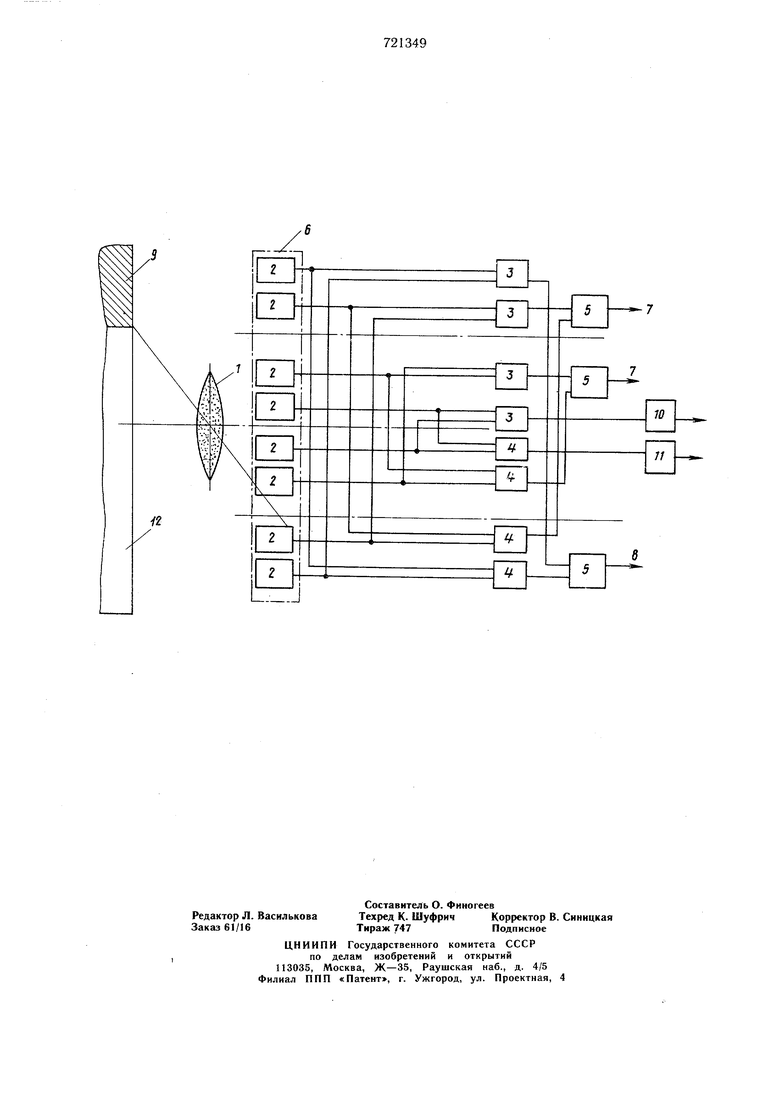
На чертеже представлена принципиальная схема предлагаемой системы управления прессом.
Система управления прессом состоит из обьектива 1, фотоприемников 2, логических элементов И 3, ИЛИ-НЕ 4, ИЛИ 5.
Фотоприемники 2 располагаются попарно на одинакввых расстояниях от оптической оси объектива 1, образуя фотолинейку 6.
К каждой паре фотоприемников 2 присоединены входы двухвходового элемента И 3 и параллельно - входы двухвходового элемента ИЛИ-НЕ 4.
Выход этих элементов посредством элементов ИЛИ 5 соединен с аппаратурой 7 и 8 переключения скорости ползуна 9. Исключение составляют элементы И 3 и ИЛИ-НЕ 4, вход которых соединен с парой фотоприемников 2, расположенных непосредственно по обе стороны оптической оси объектива 1. Выход этих элементов присоединен к аппаратуре 10 и 11 выбора направления движения ползуна 9 (вверх или вниз).
Количество логических элементов И 3, ИЛИ-НЕ 4 и ИЛИ 5 определяется числом уровней скорости ползуна, т.е. плавностью изменения скорости ползуна 9.
Система управления прессом работает следующим образом.
Объектив 1 системы устанавливается таким образом, чтобы его оптическая ось приходилась по высоте, равной номинальной высоте поковки 12. При максимальном смещении края поковки 12 от задаваемого номинального размера вверх от оптической оси объектива 1 на выходе всех засвеченных фотоприемников 2 появятся сигналы на всех соответствующих входах логических элементов И 3 и ИЛИ-НЕ 4, которые включат аппаратуру 10 направления движения ползуна вниз и одновременно через элементы ИЛИ 5 включат аппаратуру 7 и 8 управления скоростью, обеспечивая оптимальную скорость ползуна 9. В процессе обжатия поковки 12 ползуном 9 край поковки 12 начинает смещаться в сторону оптической оси объектива (поковка обжимается и ее высота уменьщается) и из зоны излучения поковки выходят фотоприемники 2, расположенные выше оптической оси объектива 1. По мере их выхода из зоны излучения поковки поочередно станут исчезать сигналы на их выходах, и собственно, начнет отключаться поочередно аппаратура 7 и 8 переключения скорости, которая станет нулевой при
совпадении края поковки с оптической осью объектива 1, т.е. при достижении поковкой номинального размера.
При даже незначительном смещении поковки ниже оптической оси объектива, на выходе элемента ИЛИ-НЕ 4 соответствующего фотоприемника расположенного непосредственно по обе стороны оптической оси объектива 1, сработает аппаратура 10 реверса движения ползуна 9 и он начнет подниматься.
Изменение скорости перемещения ползуна 9 можно совместить с изменением усилия обжатия поковки.
Засвет фотоприемников происходит за счет излучения от раскаленного тела поковКИ.
Применение системы управления работой пресса позволяет обрабатывать поковки под пресс по заданному, практически любому закону изменения скорости или величины усилия обжатия ползуна, обеспечивает плавный подход ползуна к положению равновесия.
Формула изобретения
Система управления прессом, содержащая привод ползуна, аппаратуру переключения скорости ползуна и датчик скорости ползуна с логическими элементами, отличающаяся тем, что, с целью повыщения ее надежности и точности, она снабжена объективом, оптическая ось которого расположена на высоте поковки, а датчик скорости выполнен в виде симметрично расположенных относительно оптической оси объектива ряда пар фотоприемников, соединенных с двухвходовыми логическими элементами И и ИЛИ-НЕ, выходы которых в свою очередь через элементы ИЛИ подключены к аппаратуре переключения скорости ползуна, а выходы элементов И и ИЛИ-НЕ, подключенных
0 к паре фотоприемников, расположенных непосредственно по обе стороны от оптической оси объектива, выходы которых присоединены к аппаратуре выбора направления движения ползуна, установленной в системе.
Источники информации, принятые во внимание при экспертизе
1.Артэс А. Э. Радиоизотопная автоматика в кузнечно-щтамповочном производстве. Атомиздат, Москва, 1967.
2.Авторское свидетельство СССР
0 № 444597, кл. В 21 J 7/46, 1972, (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления ковочным прессом | 1987 |
|
SU1473974A2 |
| Система импульсной лазерной локации | 2015 |
|
RU2612874C1 |
| МНОГОКАНАЛЬНАЯ СИСТЕМА НАВЕДЕНИЯ | 2000 |
|
RU2199709C2 |
| Высокоскоростной щелевой фоторегистратор | 1984 |
|
SU1216763A1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ РАССОГЛАСОВАНИЯ СИСТЕМ АВТОФОКУСИРОВКИ И СЛЕЖЕНИЯ ЗА ДОРОЖКОЙ НА ПОДВИЖНОМ ОПТИЧЕСКОМ НОСИТЕЛЕ ИНФОРМАЦИИ | 1992 |
|
RU2047227C1 |
| Система импульсной лазерной локации | 2017 |
|
RU2660390C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОМУТНЕНИЯ ХРУСТАЛИКА ГЛАЗА | 1991 |
|
RU2040203C1 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2019 |
|
RU2717362C1 |
| Система автоматического управления парогидравлическим ковочным прессом | 1979 |
|
SU774966A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ НА ПОВЕРХНОСТИ КАТАНИЯ КОЛЕСА ПОДВИЖНОГО СОСТАВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2280577C1 |