1
Изобретение относится к машиностроению, в частности к устройствам управления оборудованием для обработки давлением, и является усовершенствованием изобретения по авт. св. № 1202899.
Целью изобретения является повышение надежности работы за счет контроля текущей величины зазора между поверхностью поковки и плоскостью верхнего бойка пресса при обратном ходе его с манипулированием поковкой.
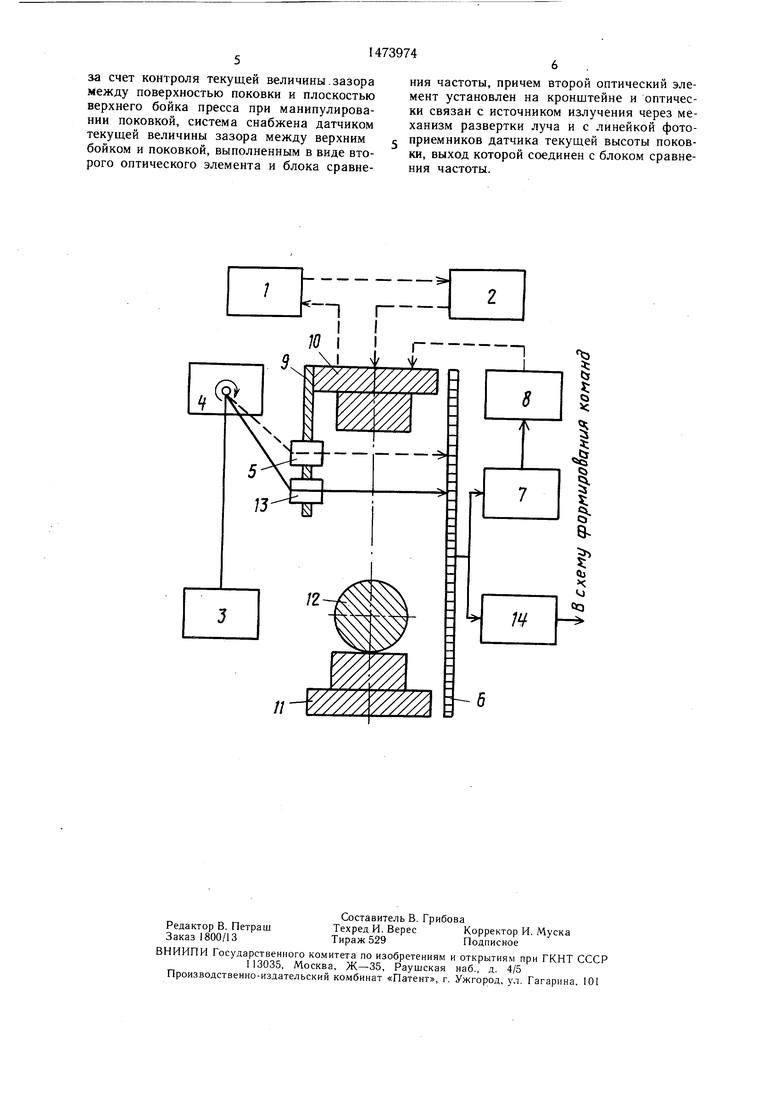
На чертеже приведена блок-схема системы управления ковочным прессом.
Система управления содержит датчики
1координаты подвижной поперечины, блок
2управления движением поперечины, датчик текущей высоты поковки, выполненный в виде источника 3 излучения, оптически связанного с механизмом 4 развертки луча, оптическим элементом 5 и линейкой 6 фотоприемников, выходы которой электрически связаны с блоком 7 контроля наличия импульсов, сигнал от которого на вход блока 8 переключения скорости При этом оптический элемент 5 установлен на кронштейне 9, закрепленном на подвижной поперечине 10 с верхним бойком, совершающей движение вверх-вниз относительно стола 11 пресса с нижним бойком, на котором устанавливается поковка 12
Дополнительно система управления содержит датчик текущей величины зазора между верхним бойком и поковкой, выполненный в виде второго оптического элемента 13 и блока 14 сравнения частоты, выход которого соединен со схемой формирования команды на запрет манипулирования поковкой (не показана) Причем второй оптический элемент 13 связан оптически с источником 3 излучения, механизмом 4 разверт4
GO СО
рь
N0
ки луча и линейкой 6 фотоприемников, а блок 14 сравнения частоты электрически связан с линейкой 6 фотоприемников.
Система управления ковочным прессом работает следующим образом.
При поступлении от функциональных блоков 2 управления движением поперечины команды на ход верхнего бойка вниз начинается перемещение подвижной поперечины 10 с максимальной скоростью. При этом луч от источника 3 излучения, например, лазерного, оптическая ось которого параллельна направлению движения поперечины 10, попадает на механизм 4 развертки, который может состоять, например, из двигателя с закрепленным на его валу зеркалом, отражающие поверхности которого параллельны оси вала, причем двигатель установлен так, что ось выходного вала перпендикулярна оптической оси источника 3 излучения. Посредством механизма 4 развертки осуществляется сканирование луча в вертикальной плоскости по оси пресса.
С некоторой частотой, определяемой скоростью сканирования, луч попадает на оптические элементы 5 и 13, которые, например, через пучки световодов направляют луч по горизонтали к линейке 6 фотоприемников, настроенных на частоту излучения источника 3. При этом для того, чтобы луч непосредственно от механизма 4 развертки не попадал на линейку 6 фотоприемников, сам механизм развертки установлен на достаточно большой высоте относительно стола 11 пресса с нижним бойком, а в качестве экрана используется кронштейн 9, на котором установлены оптические элементы 5 и 13.
Расстояние между рабочей плоскостью верхнего бойка поперечины 10 и параллельной ей оптической осью элемента 5 подбирается из условия обеспечения безударной посадки бойка на поковку за счет снижения скорости подхода поперечины. Команда на снижение скорости поперечины поступает при совпадении оптической оси элемента 5 с верхним краем поковки 12. При этом на линейку 6 фотоприемников перестают поступать световые импульсы, что фиксируется связанным с нею блоком 7 контроля наличия импульсов, который может состоять из n-входового элемента ИЛИ, где п - число фотоприемников линейки 6, триггера и двух- входового элемента И. Работа блока 7 синхронизируется от генератора тактовых частот.
Сигнал от блока 7 контроля наличия импульсов поступает на вход блока 8 переключения скорости, например трехпозицион- ного гидрораспределителя с электромагнитным управлением, который переключает скорость подхода подвижной поперечины 10 с большой на малую, в результате чего происходит безударная посадка бойка на поковку.
Момент посадки фиксируется с помощью датчиков 1 координаты подвижной поперечины по падению скорости перемещения по- перечилы 10 до нуля, после чего от функциональных блоков 2 управления движением поперечины поступает команда на рабочий ход. При достижении заданного размера ковки от функциональных блоков 2 управления движением поперечины поступает команда
0 на ход бойка вверх. После прохождения бойком пути, равного настраиваемой величине, начинается манипулирование поковкой. При этом, если не приняты специальные меры, возможно выбивание верхнего бойка поковкой в тех случаях, когда последняя искривлена
5 или имеет ступенчатую форму.
Для исключения возможности выбивания бойка при его движении вверх осуществляется контроль текущей величины зазора между верхним бойком и поковкой.
Q Расстояние между рабочей плоскостью верхнего бойка поперечины 10 и параллельной ей оптической осью элемента 13 подбирается таким, чтобы исключить возможность выбивания бойка путем запрета манипулирования поковкой.
5 Луч от механизма 4 развертки с некоторой частотой попадает на оптические элементы 5 и 13, а от них на линейку 6 фотоприемников, с которой электрически связан блок 14 сравнения частоты, состоящий, на0 пример, из двух элементов И, трех элементов ИЛИ, RS-триггера и двух генераторов тактовой частоты.
Если на линейку 6 фотоприемников за период сканирования луча пришли два световых импульса, на выходе блока 14 сигнал
5 не формируется. В случае перекрытия поковкой луча от оптического элемента 13 на линейку 6 фотоприемников поступает один импульс, при этом блок 14 сравнения частоты формирует сигнал, поступающий на вход схемы формирования команды на запрет
0 манипулирования поковкой.
Поперечина 10 с верхним бойком продолжает двигаться вверх, и после того, как на линейку 6 фотоприемников начинают поступать два световых импульса, манипулироваг ние поковкой разрешается.
Таким образом, система управления ковочным прессом позволяет осуществлять контроль за текущей величиной зазора между рабочей плоскостью верхнего бойка пресса и поверхностью поковки при обратном ходе
0 бойка с одновременным манипулированием поковкой. Это повышает надежность работы пресса, поскольку исключается возможность выбивания бойка поковкой при ее манипулировании, что обуславливает эффективность использования схемы управления. Формула изобретения Система управления ковочным прессом по авт. св. № 1202899, отличающаяся тем, что, с целью повышения надежности работы
за счет контроля текущей величины.зазора между поверхностью поковки и плоскостью верхнего бойка пресса при манипулировании поковкой, система снабжена датчиком текущей величины зазора между верхним бойком и поковкой, выполненным в виде второго оптического элемента и блока сравнения частоты, причем второй оптический элемент установлен на кронштейне и оптически связан с источником излучения через механизм развертки луча и с линейкой фотоприемников датчика текущей высоты поковки, выход которой соединен с блоком сравнения частоты.
| название | год | авторы | номер документа |
|---|---|---|---|
| Блок-схема управления гидравлическими прессами | 1976 |
|
SU737244A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ КОВОЧНЫМ ПРЕССОМ | 1972 |
|
SU323295A1 |
| Устройство дистанционного замера поковок | 1982 |
|
SU1139012A1 |
| Ковочный агрегат | 1978 |
|
SU810353A1 |
| Система импульсной лазерной локации | 2015 |
|
RU2612874C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ КОВОЧНЫМ ПРЕССОМ | 1973 |
|
SU408827A1 |
| Способ автоматического контроля размеров поковки | 1960 |
|
SU142504A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ МАШИН И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2664033C1 |
| Система импульсной лазерной локации | 2017 |
|
RU2660390C1 |
| Гидравлический пресс | 1980 |
|
SU891481A1 |
Изобретение относится к машиностроению, в частности к устройствам управления оборудованием для обработки давлением. Цель изобретения - повышение надежности работы за счет контроля текущей величины зазора между поверхностью поковки и плоскостью верхнего бойка при манипулировании поковкой. В систему дополнительно к имеющемуся каналу оптического контроля высоты поковки, аналогичного по функционированию, введен канал контроля текущего расстояния между поковкой и верхним бойком. Для этого используется оптический датчик и блок сравнения частоты. Датчик выполнен в виде второго оптического элемента, установленного на кронштейне. Имеется источник излучения, механизм развертки луча и линейка фотоприемников. Блок сравнения входом соединен с линейкой фотоприемников, а выходом- со схемой формирования команды на запрет манипулирования поковкой при обратном ходе бойка. Таким образом достигается подача команды на разрешение манипулированием поковкой только при наличии наперед заданного расстояния между поковкой и верхнем бойком, что исключает возможность выбивания его при обратном ходе. Этим достигается повышение надежности работы системы и пресса в целом. 1 ил.
| Система управления ковочным прессом | 1984 |
|
SU1202899A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
